







在海图栅格化的基础上跑下路径规划算法
Dijkstra算法源代码启发于运动规划入门 | 1. 白话Dijkstra,从原理到Matlab实现 - 古月居 (guyuehome.com)
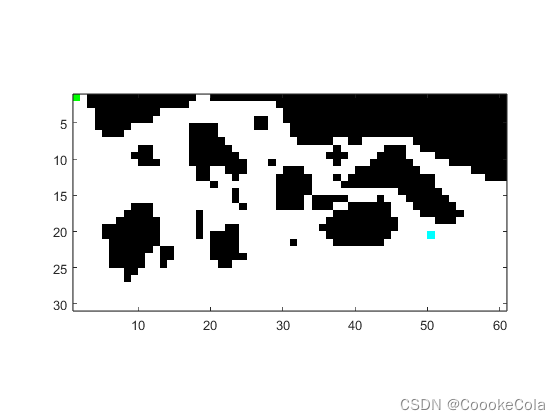
初始化:导入的地图是之前自制的栅格地图,设置起点、目标点、读取地图中障碍物位置
clear;
clc;
%% 导入数据、初始化参数
% 导入数据,该数据集中0显示是黑色,1显示是白色
map_struct = load('map30_60.mat'); % 地图是之前栅格化后,保存为一个矩阵.mat
map_names = fieldnames(map_struct);
map_data = getfield(map_struct, map_names{1}); % 读取load的数据并重命名为map_data
% 绘制颜色图
cmap = [1 1 1; ... % 1 - white - clear cell
0 0 0; ... % 2 - black - obstacle
1 0 0; ... % 3 - red - visited
0 0 1; ... % 4 - blue - on list
0 1 0; ... % 5 - green - start
1 1 0; % 6 - yellow - destination
0 1 1]; % 7
map_data(map_data==0) = 2; % 为0的点形成障碍物; map_data==1的点本身就是白色,不需要重新设置
% 起点、终点设置
map_data(1, 1) = 5; % 起点
map_data(20, 50) = 7; % 终点
image(1.5, 1.5, map_data);
colormap(cmap);
axis image;
% nrows为行、ncols为列
nrows = 30;
ncols = 60;
% 起点、终点索引设置
start_node = sub2ind(size(map_data), 1, 1); % 起点坐标
dest_node = sub2ind(size(map_data), 20, 50); % 终点坐标
% 初始化cost、起点设置为0
distanceFromStart = Inf(nrows,ncols);
distanceFromStart(start_node) = 0;
% 初始化父节点矩阵为0
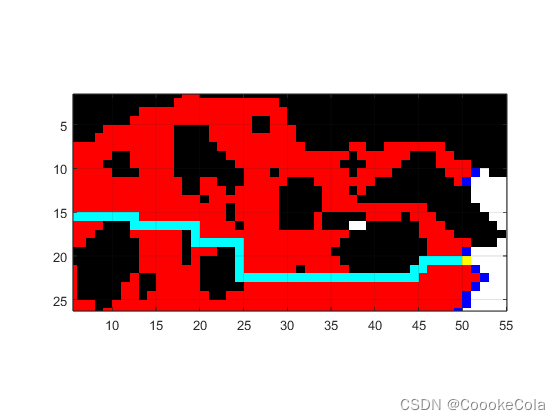
parent = zeros(nrows,ncols); 主循环:寻路并绘图,Dijkstra的一个特点是把所有合法的相邻节点都遍历,就像石头扔进水里溅起涟漪,一圈圈全遍历直到找到目标点。
想深入了解Dijkstra算法原理的可以去本文提到的链接去学习
while true
% 绘制当前图窗
map_data(start_node) = 5;
map_data(dest_node) = 6;
image(1.5, 1.5, map_data);
grid on;
axis image;
drawnow;
[min_dist, current] = min(distanceFromStart(:)); % 找到未完全遍历节点中cost最小的节点
if ((current == dest_node) || isinf(min_dist))
break;
end
map_data(current) = 3;
distanceFromStart(current) = Inf;
% 寻找四个相邻节点,判断临近节点是否合法,更新合法节点的cost和partent
[i, j] = ind2sub(size(distanceFromStart), current);
neighbor = [i-1,j;...
i+1,j;...
i,j+1;...
i,j-1] ; % 当前节点的临近四个节点
outRangetest = (neighbor(:,1)<1) + (neighbor(:,1)>nrows) +...
(neighbor(:,2)<1) + (neighbor(:,2)>ncols ) ;
locate = find(outRangetest>0); % 返回大于0(不合法临节点)的索引
neighbor(locate,:)=[] ;
neighborIndex = sub2ind(size(map_data),neighbor(:,1),neighbor(:,2)) ;
for i=1:length(neighborIndex) % 遍历合法节点的索引
if (map_data(neighborIndex(i))~=2) && (map_data(neighborIndex(i))~=3 && map_data(neighborIndex(i))~= 5)
map_data(neighborIndex(i)) = 4;
if distanceFromStart(neighborIndex(i))> min_dist + 1
distanceFromStart(neighborIndex(i)) = min_dist + 1; % 相邻节点的cost为min_dist+1
parent(neighborIndex(i)) = current;
end
end
end
end
% 判断是否找到终点,找到了就提取路线
if (isinf(distanceFromStart(dest_node)))
route = [];
else
% 提取路线坐标
route = dest_node;
while (parent(route(1)) ~= 0) % 根据父节点顺藤摸瓜
route = [parent(route(1)), route];
end
% 动态显示出路线
for k = 2:length(route) - 1
map_data(route(k)) = 7;
pause(0.1);
image(1.5, 1.5, map_data);
grid on;
axis image;
end
end附上结果图:
祝各位生活愉快

















 558
558

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









