







一、ROS Melodic的安装:
借鉴鱼香ROS的安装方法
sudo apt-get install curl && curl http://fishros.com/tools/install/ros-melodic | bash
二、ZED SDK的安装
第一步:下载ZED SDK
第二步:在终端输入
cd Downloads/
chmod +x ZED_SDK_Ubuntu18_cuda10.0_v3.6.2.run
./ZED_SDK_Ubuntu18_cuda10.0_v3.6.2.run
按空格键阅读协议,阅读完毕后输入q退出
一路输入“y”
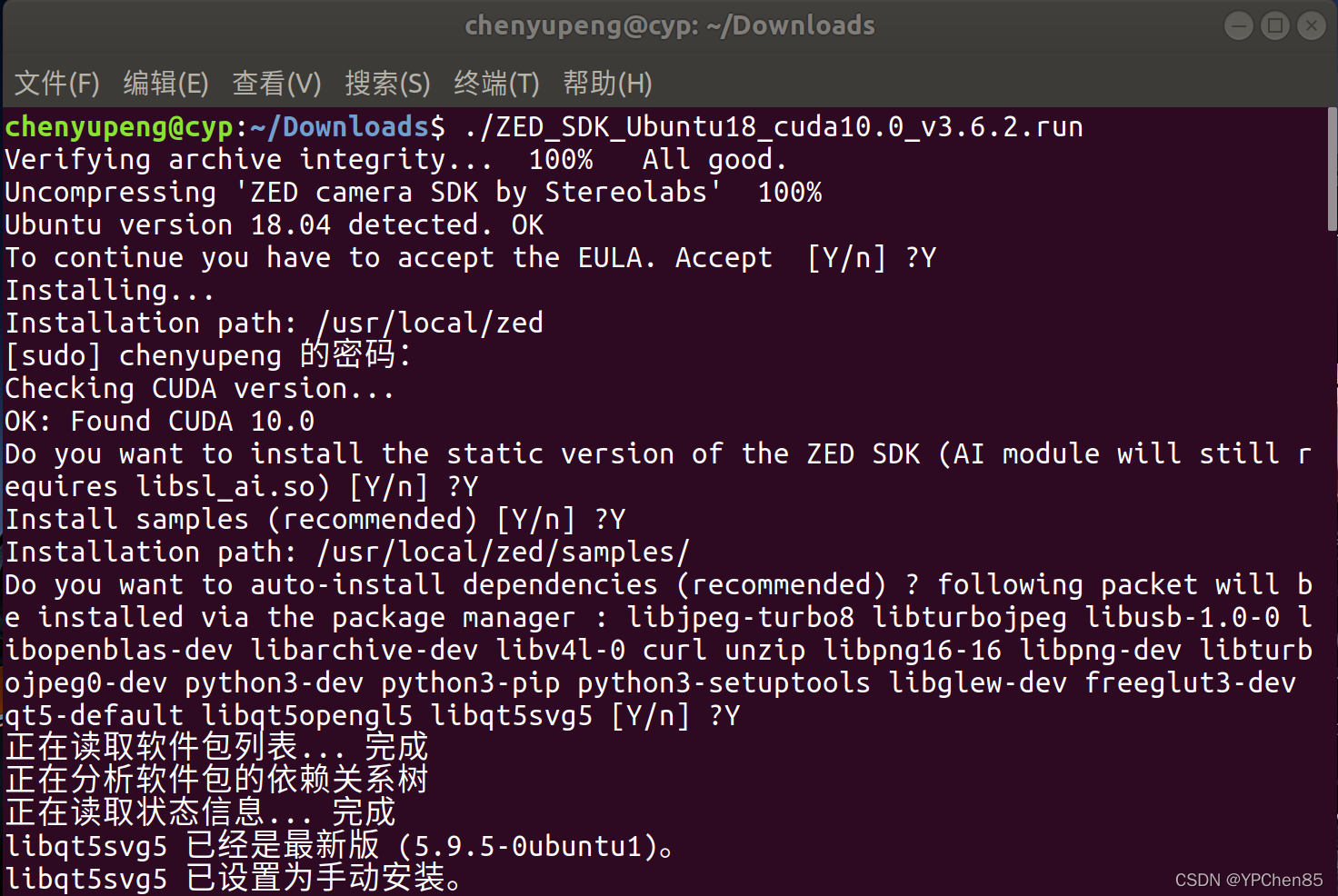
安装Python api 输入"y"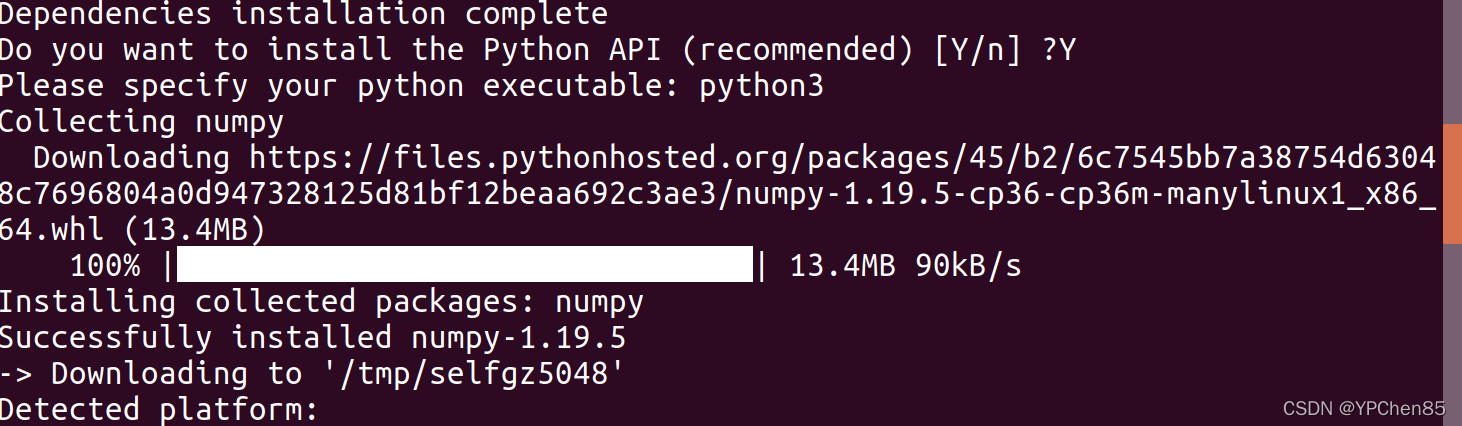 若在conda环境中使用python api需要切换到虚拟环境重新编译
若在conda环境中使用python api需要切换到虚拟环境重新编译
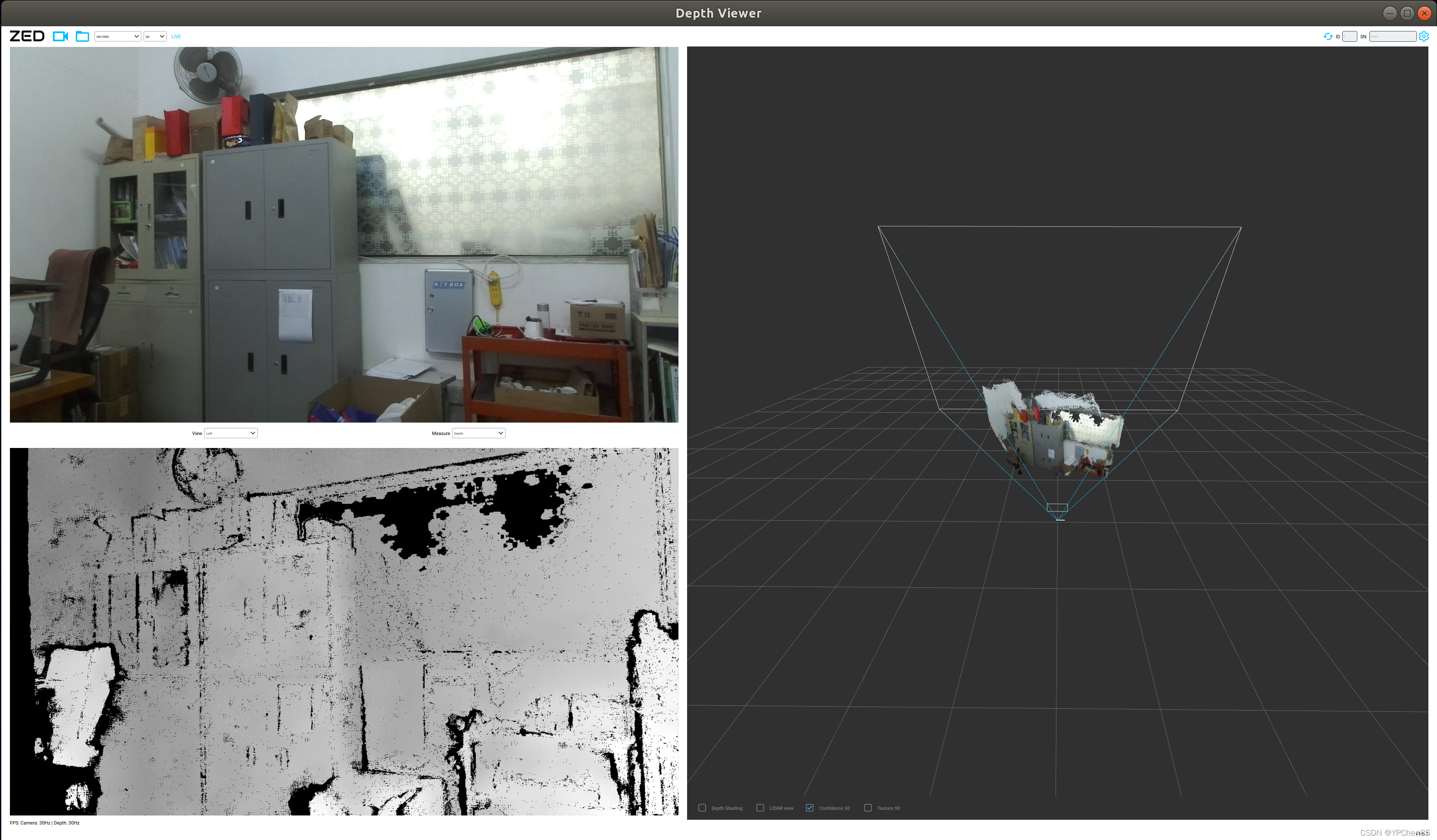
重启电脑完成安装,运行测试程序
cd /usr/local/zed/tools
./ZED_Depth_Viewer
三、安装ZED ROS Wrapper
mkdir -p zed_ws/src
cd ~/zed_ws/src
git clone --recursive https://github.com/stereolabs/zed-ros-wrapper.git
cd ~/zed_ws
rosdep install --from-paths src --ignore-src -r -y
catkin_make -DCMAKE_BUILD_TYPE=Release
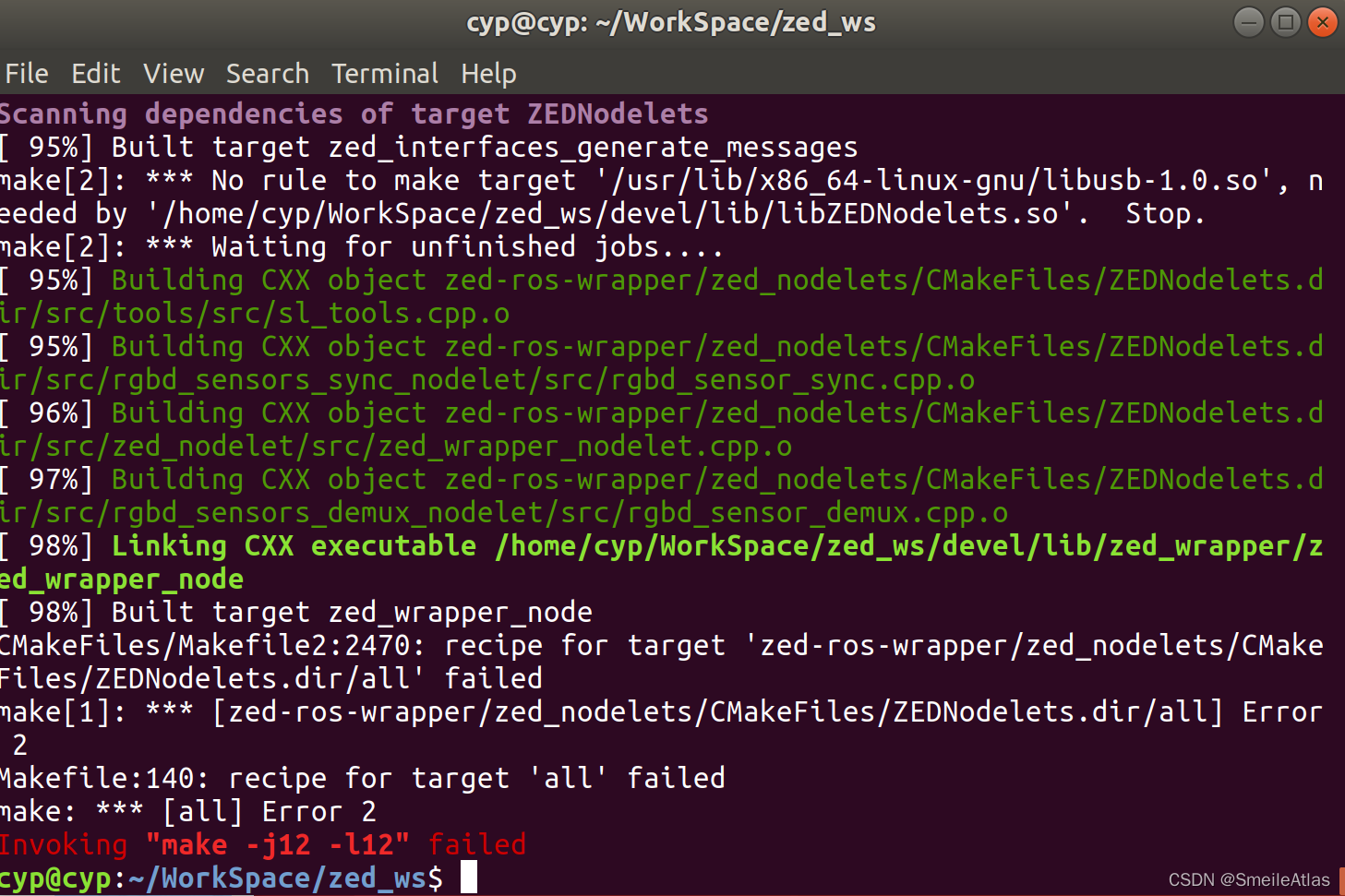
在这里插入代码片
启动 ZED相机节点
source ./devel/setup.bash
roslaunch zed_wrapper zed.launch
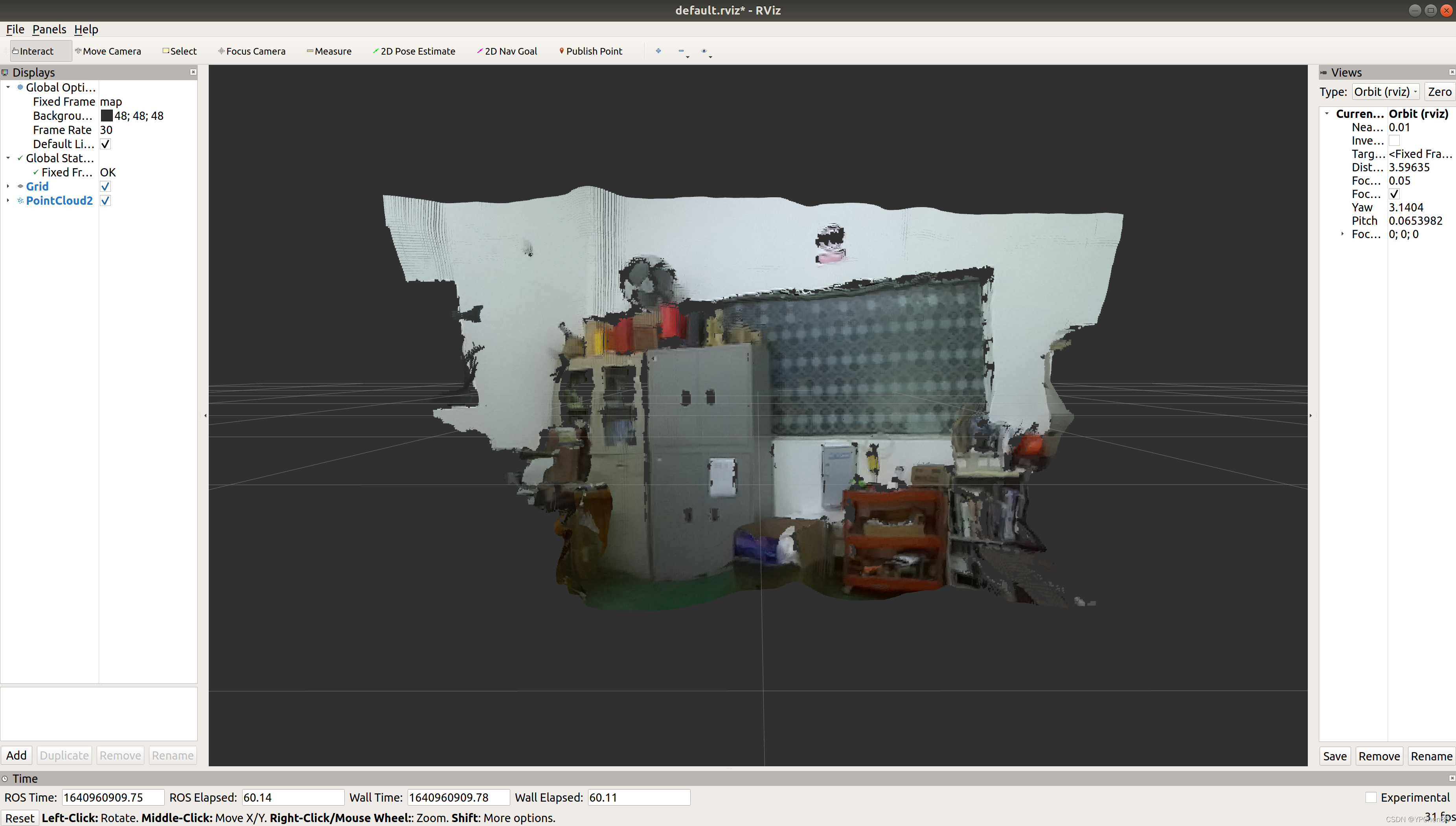
新建一个的终端
rviz
四、ZED 相机标定
# 安装标定功能包
sudo apt-get install ros-melodic-camera-calibration
# 启动ZED相机
source ~/zed_ws/devel/setup.bash
roslaunch zed_wrapper zed.launch
# 标定双目
rosrun camera_calibration cameracalibrator.py --approximate 0.1 --size 8x6 --square 0.02 right:=/zed/zed_node/right/image_rect_color left:=/zed/zed_node/left/image_rect_color right_camera:=/zed/zed_node/right left_camera:=/zed/zed_node/left --no-service-check
其中:
- –approximate:摄像机校准器可以处理时间戳不完全相同的图像
- –size 8x6 当前标定板的大小-1, 参数中为字母x
- –square 0.02为每个棋盘格的边长
- image:=/camera/image_raw(图像Topic)
- camera:=/camera(相机名)
标定界面如下:
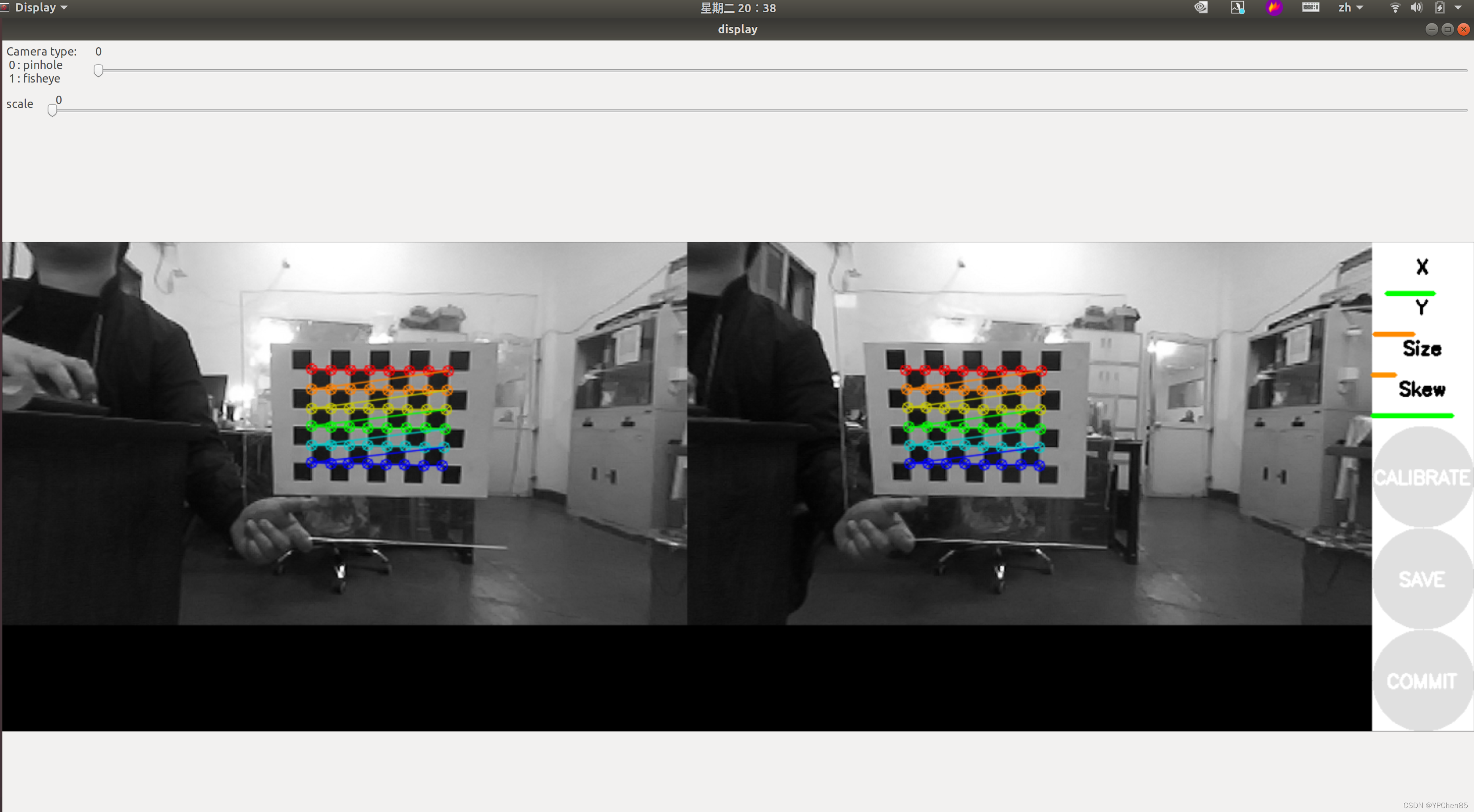
从图中可以看到,在GUI的右侧有X,Y,Size,Skew四个标志条
它们的含义是:
- x:表示标定板在水平方向上的位置,从左到右逐渐变大。
- y:表示标定板在垂直方向上的位置,从上到下逐渐变大。
- Size:表示标定板在图中所占比例的大小,从远到近逐渐变大。
- Skew:表示标定板在图像中倾斜的角度大小,随倾斜角度增大逐渐变大。
我们的工作就是从左到右、从上到下,从远到近,并且不断变换标定板的角度,使四个标志条都变为绿色。
点击CALIBRATE
点击SAVE保存标定数据
标定数据保存为Computer/tmp/calibrationdate.tar.gz


















 1384
1384

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











