







算法解析
场景:
参考线平滑算法::
(1)作用:
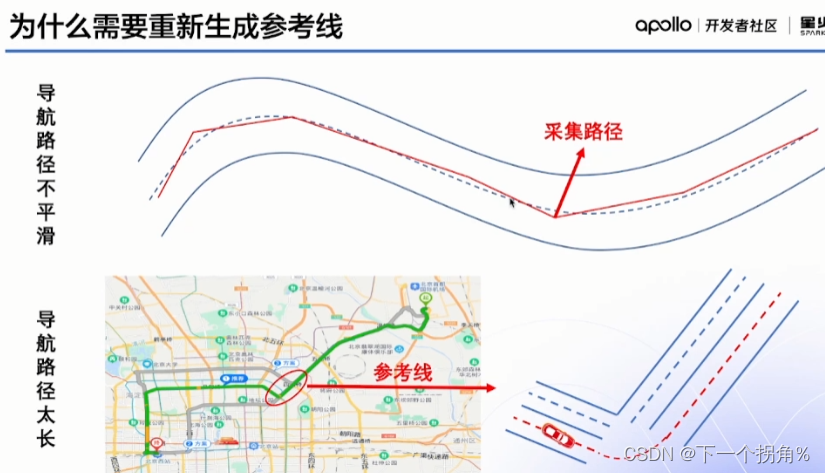
routing结果:
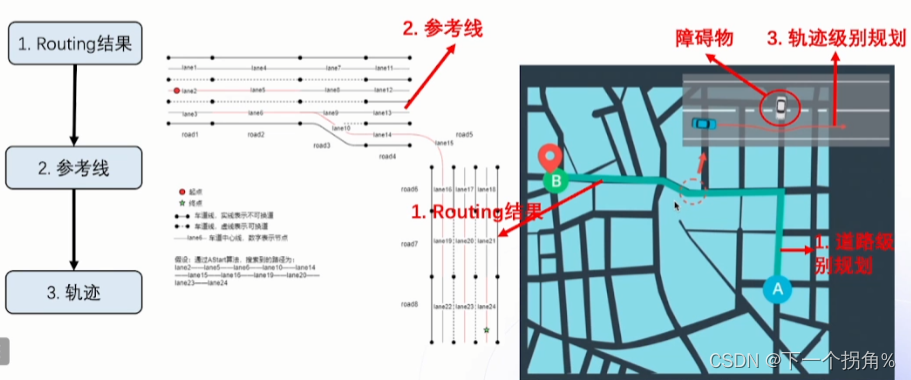
在没有道路不通行的情况下,routing的道路是不变的,;只有道路不通行的时候,planning会重新发送道路规划模块给routing,routing是一个全局的结果。
参考线在routing的基础上根据车辆周围障碍物和交规,取出其中一段作为参考线。
轨迹是在参考线中更为具体的一条,并且包含车辆的动态信息
Apollo的参考线referenceline数据结构::
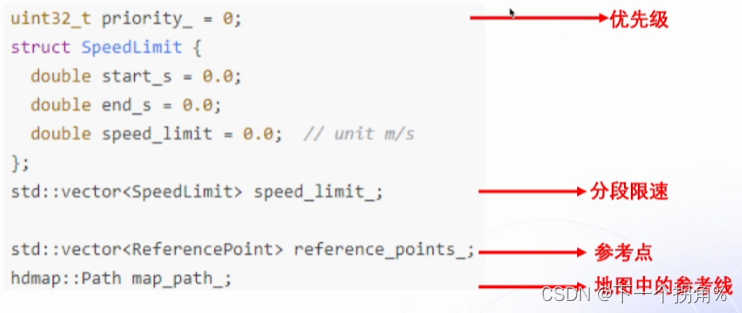
参考线的优先级::再有多条参考线时,根据优先级挑选
分段限速、参考点是“数组”
(vector::容器,)
map_path_:地图中的参考线要做映射到planning中的参考线中,一一对应
1.
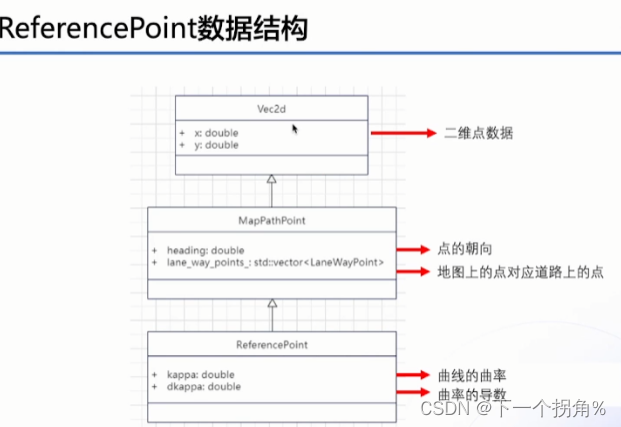
曲率影响车辆方向
2.
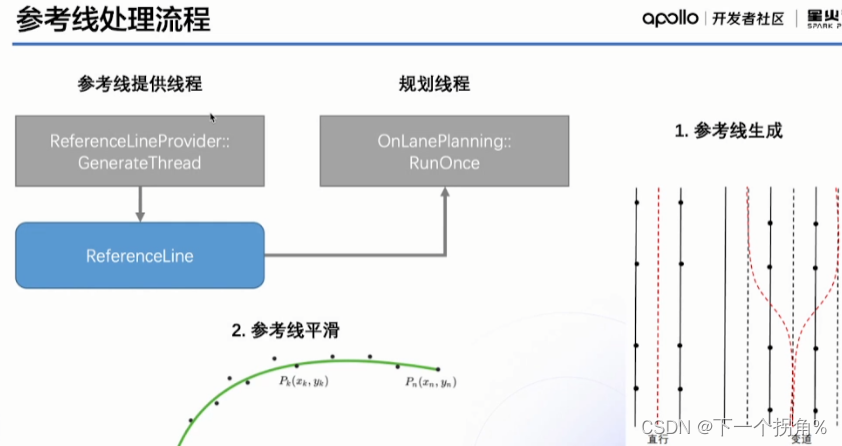
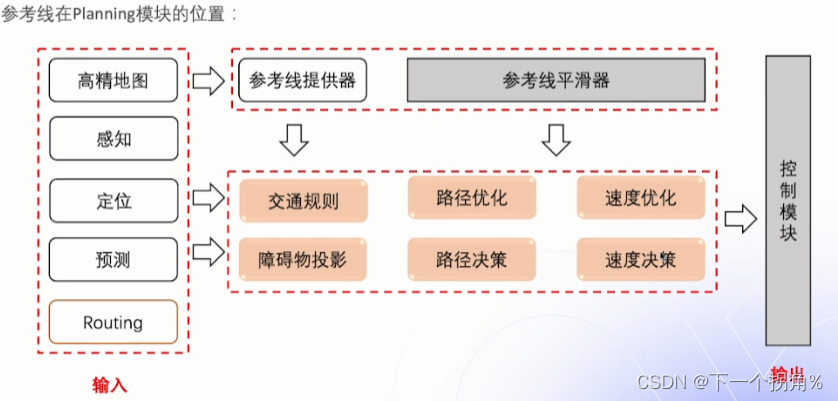
参考线提供者根据地图信息和pnc中车辆位置来生成
参考线生成::
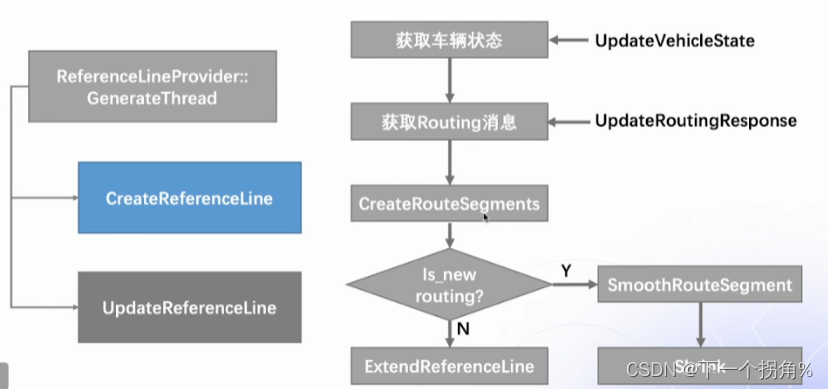
参考线平滑::采用离散点的平滑

可通过配置参数来选择平滑方法
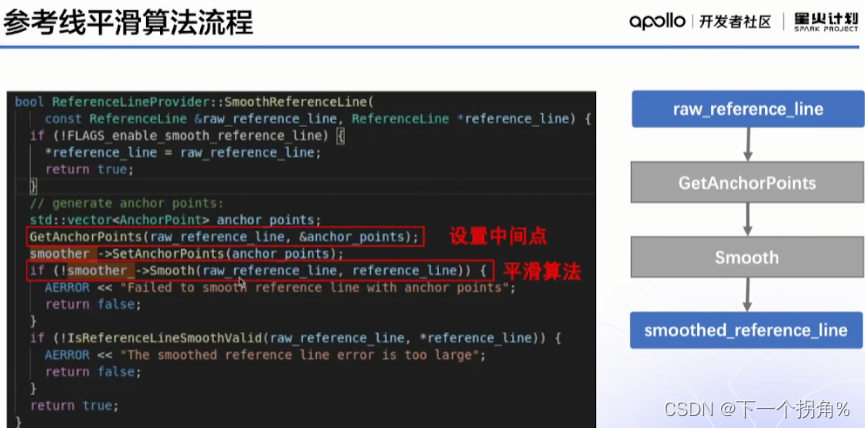
参考线的平滑函数是在 ReferenceLine类的SmoothReferenceLine的函数中实现的::
输入是raw_reference_line,输出是平滑后的reference_line,
中间经过产生中间点、平滑两个阶段实现,平滑算法在smoother的Smooth函数中实现
1. 设置中间点
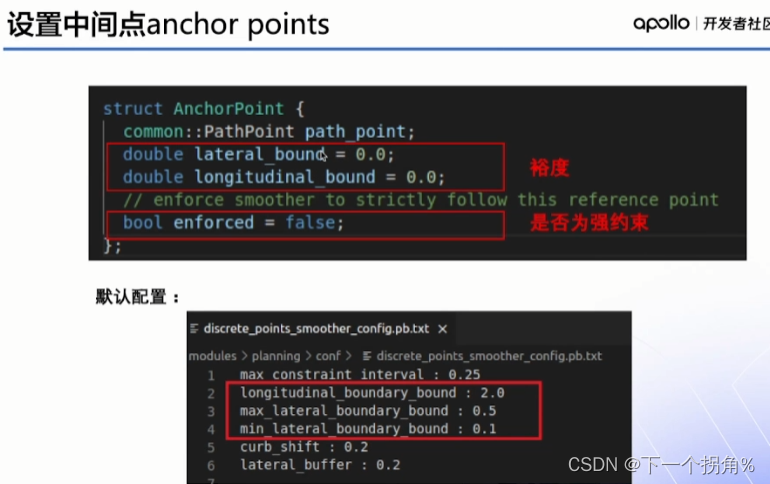
根据参考线x值进行均匀的采样,每一个中间点都会有path_point 和 横纵向裕度(裕度指:采样时点周围可以平移的空间),变量enforced是判断裕度是不是强约束,如是,则必须遵守裕度,在平滑过程中只有首尾两个点是强约束,别的点都不是强约束。
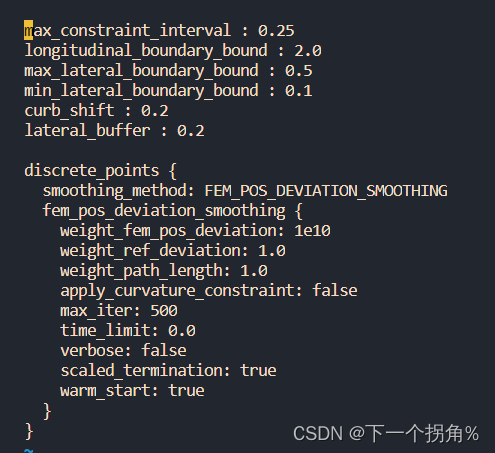
默认配置:纵向边界、横向边界(重要的)
2.平滑函数::
参考线上的离散点有限的平移,对原始的参考线进行平滑。类DiscretePointsSmoothCofig中有两种不同的平滑算法,通过配置文件中的配置参数进行选择。
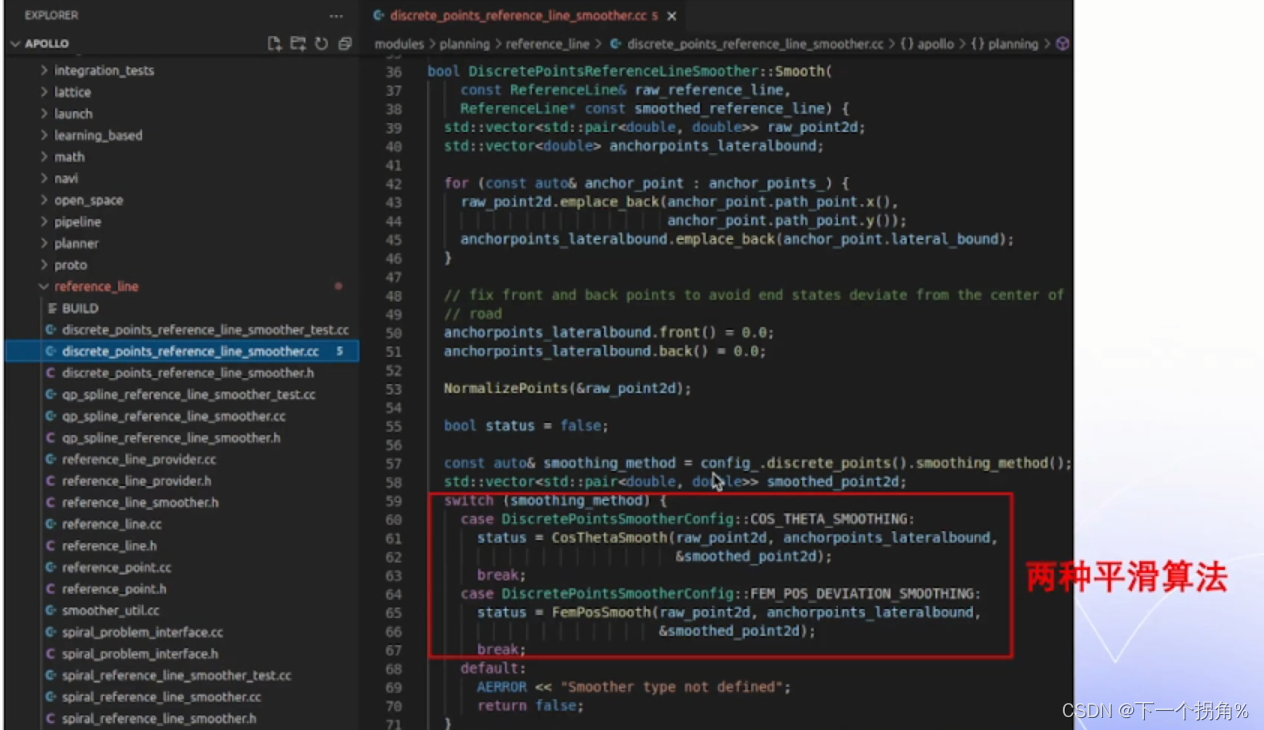
(1)FemPosSmooth算法
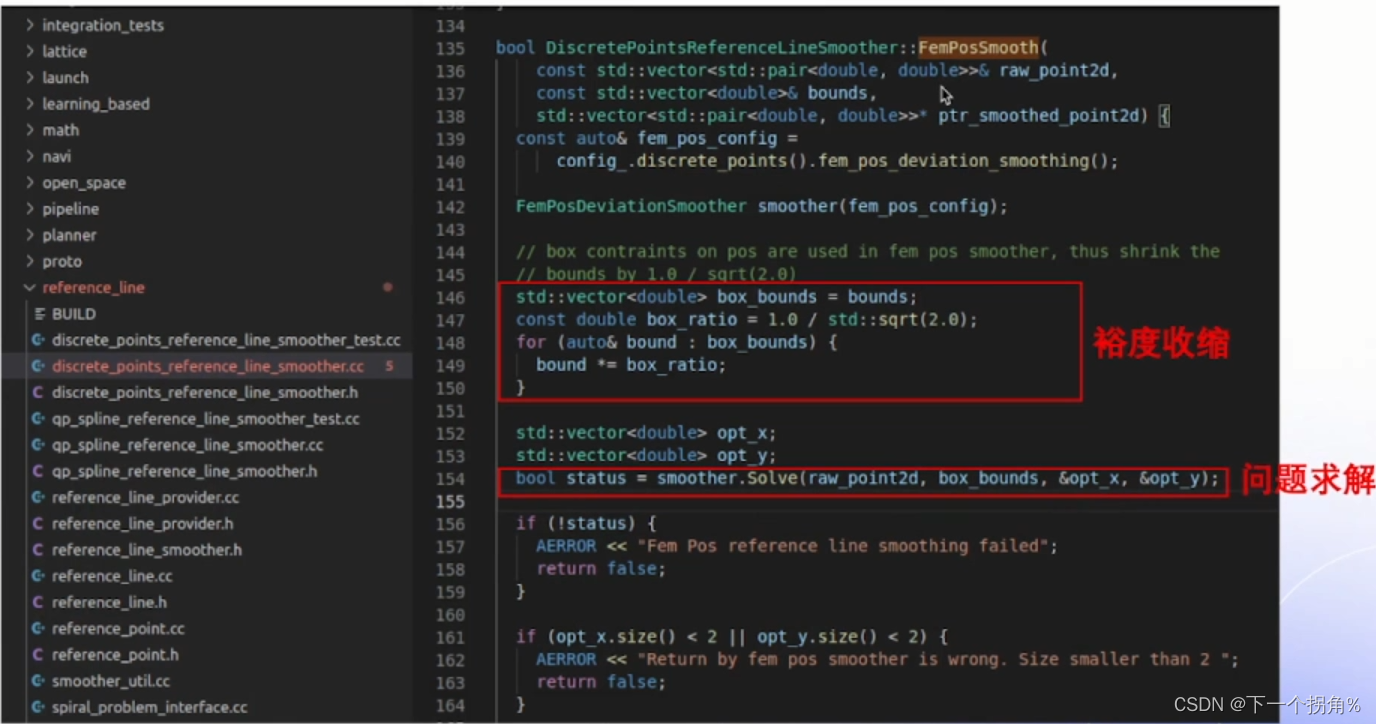
输入:anchor point 中间点里面的x,y和横纵向裕度(raw_point2d ,bounds)
输出:平滑后的点(ptr_smoothed_point2d)
Solve函数进行求解::
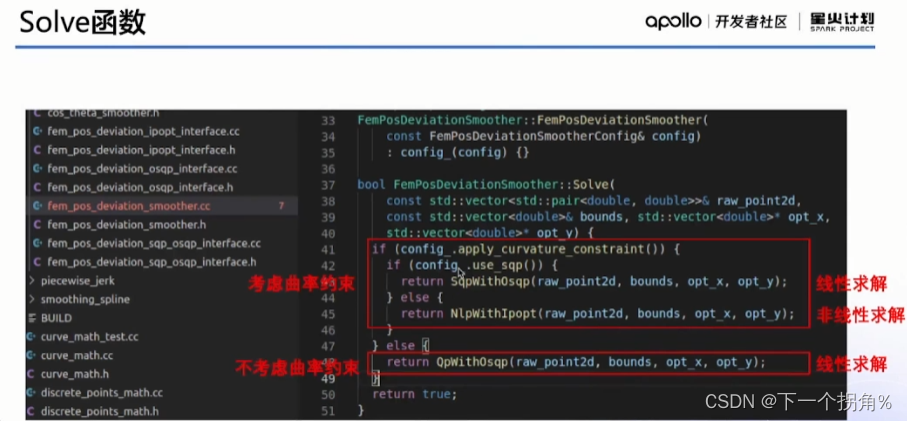
三种求解方式,Apollo默认不考虑曲率约束,求解会快一些
平滑求解过程::(二次优化问题)
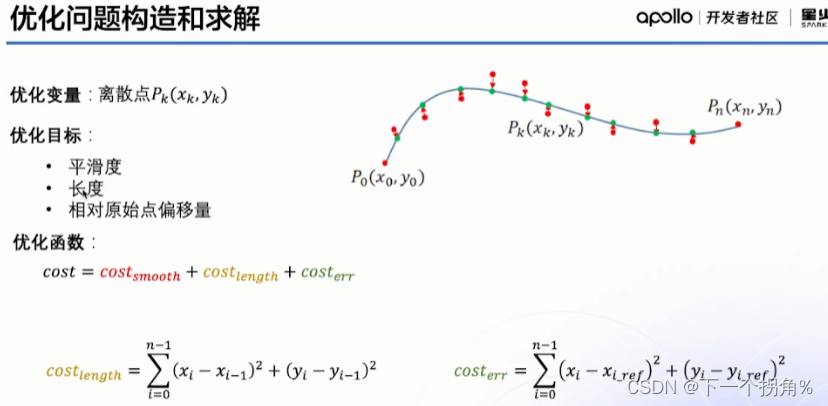
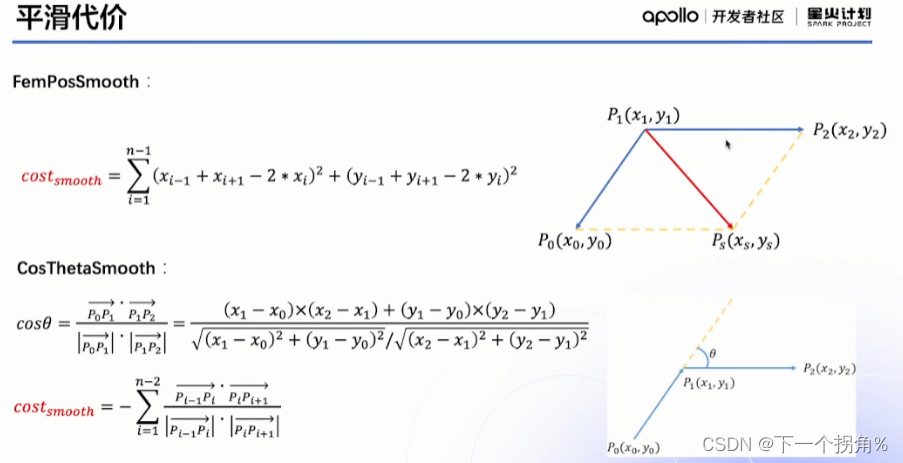
红线越短约好,越平滑
二次优化的约束条件:::
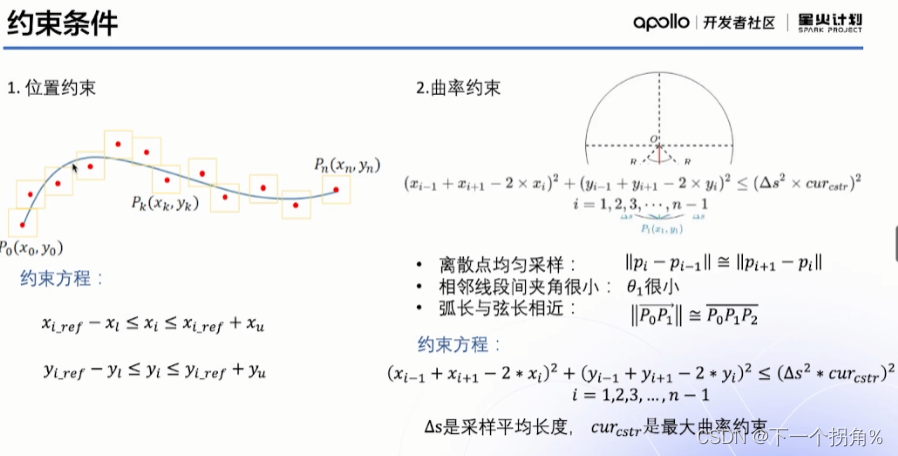
横纵向约束在bound_boxd的约束范围内
2.U型路口仿真测试
绘制对比路径::
(1)记录行驶数据:
打开jupyter notebook,脚本在modules 的tools文件夹下
cyber_record记录::cyber_recorder record -a
车辆行驶完ctrl+c停止
ls 查看刚才录制的文件,将文件移动到tools所在的目录下::
mv 20230108131647.record.0000 modules/tools/
20230108131647.record.0000就是本次录制的文件,所对应的参考线平滑的参数在 ::
vim modules/planning/conf/discre**.pb.txt
可以查看配置文件,调配置参数::
为了绘制对比,所以重启一下dream view,避免上次数据的混入。
【在这里面修改,按键“insert”,Esc退出,shift+进入命令格式。 :q退出上面格式不保存,:wo保存退出,
bash 编译::bash /apollo_workspace/scripts/bootstrap_neo.sh restart
然后绘制路径,开启录制。
然后在
工具中将这两个文件名修改成生成的两个,运行

















 2391
2391

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









