







4.3.2 C++ 平面拟合的实现
参考教程:
gaoxiang12/slam_in_autonomous_driving: 《自动驾驶中的SLAM技术》对应开源代码 (github.com)
1. 编写 Plane fitting
1.1 创建文件夹
通过终端创建一个名为Plane_fitting的文件夹以保存我们的VSCode项目,在/Plane_fitting目录下打开vscode
rosnoetic@rosnoetic-VirtualBox:~$ mkdir -p Plane_fitting
rosnoetic@rosnoetic-VirtualBox:~$ cd Plane_fitting/
rosnoetic@rosnoetic-VirtualBox:~/Plane_fitting$ code .
1.2 编写平面拟合程序
新建文件linear_fitting.cpp

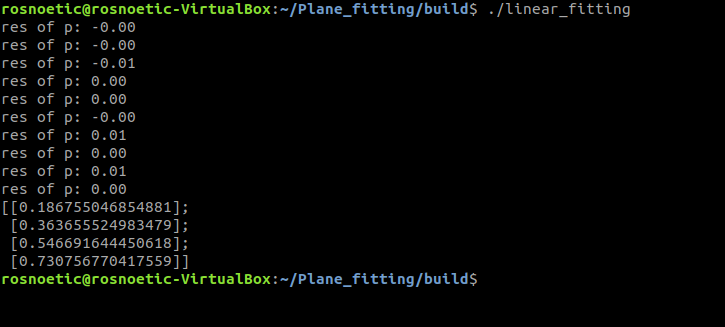
使用快速 SVD 分解,仅计算 A 矩阵 SVD 结果的最后一列。在计算完成后,将点的具体取值代入本方程,要求它们的平方误差不超过预设的阈值。下面这段测试程序把随机生成的平面参数作为真值,在平面上取若干个点,再加入噪声,做平面拟合。
在linear_fitting.cpp粘贴如下代码并保存(Ctrl+S)
// 引入Eigen头文件与常用类型
#include <Eigen/Core>
#include <Eigen/Dense>
#include <Eigen/Geometry>
#include <opencv2/opencv.hpp>
#include <opencv2/core.hpp>
#include <iostream>
Eigen::IOFormat HeavyFmt(Eigen::FullPrecision, 0, ", ", ";\n", "[", "]", "[", "]");
template <typename S>
bool FitPlane(std::vector<Eigen::Matrix<S, 3, 1>>& data, Eigen::Matrix<S, 4, 1>& plane_coeffs, double eps = 1e-2)  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 3839
3839

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









