







 本文介绍了一种基于Floyd算法的改进方法,用于寻找两点间噪声值最小的路径。通过将加法替换为min函数,min替换为max,解决了在噪声图中寻找最优路径的问题。
本文介绍了一种基于Floyd算法的改进方法,用于寻找两点间噪声值最小的路径。通过将加法替换为min函数,min替换为max,解决了在噪声图中寻找最优路径的问题。
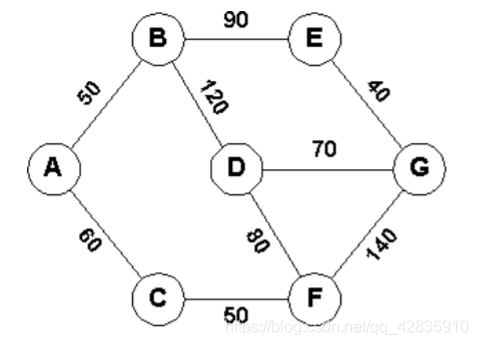
输入一个C个点S条边(C≤100,S≤1000)的无向带权图,边权表示该路径上的噪声值。当噪声值太大时,耳膜可能会受到伤害,所以当你从某点去往另一个点时,总是希望路上经过的最大噪声值最小。输入一些询问,每次询问两个点,输出这两点间最大噪声值最小的路图。例如,在图中,A到G的最大噪声值为80,是所有其他路径中最小的(如ABEG的最大噪声值为90)。
【分析】
本题的做法十分简单:直接用floyd算法,但是要把加法改成min,min改成max。为什么可以这样做呢?不管是floyd算法还是dijkstra算法,都是基于这样一个事实:对于任意一条至少包含两条边的路径i->j,一定存在一个中间点k,使得i->j的总长度等于i->k与k->j的长度之和。对于不同的点k,i->k和k->j的长度之和可能不同,最后还需要取一个最小值才是i->j的最短路径。
把刚才的推理中“之和”与“取最小值”换成“取最小值”和“取最大值”,推理仍然适用。
#include <cstdio>
#include <cstring>
#include <algorithm>
using namespace std;
const int N = 100+5, INF = 0x3f3f3f3f;
int g[N][N];
int main(int argc, char** argv) {
int c, s, q, kase = 0;
while(scanf("%d%d%d",&c,&s,&q) == 3 && c){
memset(g, INF, sizeof(g));
for(int i = 0; i < s; i++){
int u, v, d;
scanf("%d%d%d",&u,&v,&d);
g[u][v] = g[v][u] = d;
}
for(int k = 1; k <= c; k++)
for(int i = 1; i <= c; i++)
for(int j = 1; j <= c; j++)
g[i][j] = min(g[i][j], max(g[i][k], g[k][j]));
if( kase) printf("\n");
printf("Case #%d\n", ++kase);
while(q--){
int u, v;
scanf("%d%d",&u,&v);
if(g[u][v] == INF) printf("no path\n");
else printf("%d\n",g[u][v]);
}
}
return 0;
}

















 1217
1217

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









