









只是个人笔记,看到错误还望指正
参考了大牛的博客,让我看论文事半功倍,顶起来(人家还开源的自己的代码!!)博主文章导航(分门别类,实时更新,永久置顶)_闲情逸致~-优快云博客_分门别类
中国学者(优秀!)Xing mei提出的AD-Census算法:顾名思义就算AD算法加上Census算法:

Census算法基于窗口的相对亮度差值,可以更好处理亮度不一样的图片,而且对噪声和弱纹理有一定的鲁棒性,AD一定程度上缓解了重复纹理问题。两者结合,扬长避短:
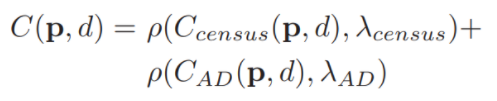
公式都做了归一化,结果都在0-1之间,所有C的结果在0-2之间。
十字交叉代价聚合:基于相邻的颜色相近的像素有相近的视差。
构造像素的十字臂:以像素为中心向上下左右伸展,遇到以下情况停止扩展:
1 遇到颜色和中心像素差别大的像素停止
2 臂上伸展到的像素和它这个方向旁遍的像素颜色差异大(设置颜色阈值)也会停止,防止十字臂穿过边缘不连续区域。
3 伸展到的像素离中心像素太远的时候会停止,设置了两个阈值,L1和L2,L2<L1,当超过L2没超过L1的时候,将颜色阈值变小,直到超过L1,停止。这是为了适应无纹理的背景区域。(例如:一块很大的纯色背景区域)
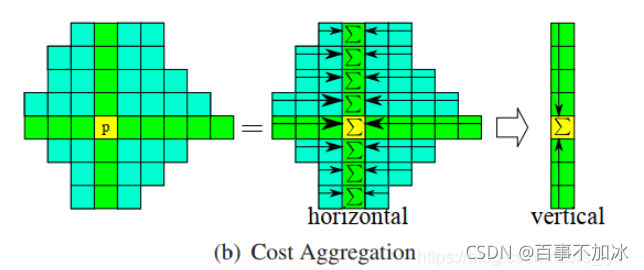
像素p的支持区域是十字臂以及每个垂直臂像素q向水平方向扩展出的水平臂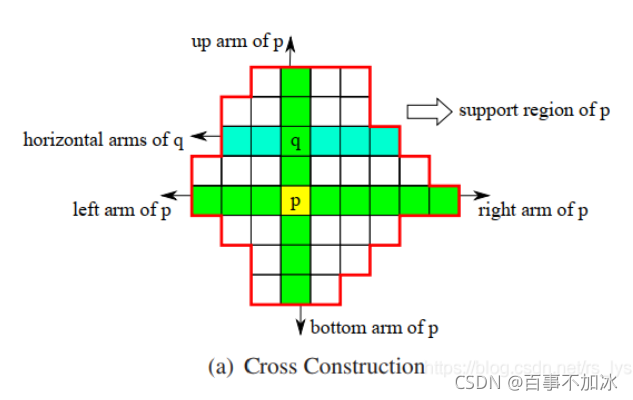
代价聚合是将支持区域中的所有像素的代价值以先水平后垂直或者先垂直后水平的方式叠加到一起,在除以支持区域中总的像素数。
视差优化:左右一致性检查,找出无效的点:误匹配点和遮挡点
对于无效的点P,在它十字交叉得到的支持区域中找到所有可靠像素,对这些像素视差投票,找到对应像素最多的那个视差d,可靠像素数够多,视差d对应的像素数占的比例也多,则d就是无效点P的视差。

















 1225
1225

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









