







视差概念公式推导
双目立体匹配基础之视差概念
相机成像的模型如下图所示:
P为空间中的点,P1和P2是点P在左右像平面上的成像点,f是焦距,OR和OT是左右相机的光心。由下图可见左右两个相机的光轴是平行的。XR和XT是两个成像点在左右两个像面上距离图像左边缘的距离。

只要把这下面几点说清楚就很简单了
L为像面的长度
关于光轴对称
视差为Xr-Xt
若两个相机已经校正完成即达到极线平行,两条光轴方向也平行。则视差和物体深度的关系式如下:
(1)
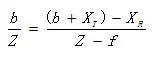
可推导到:
(2)
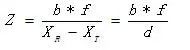
证明过程: 已知:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2590
2590

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









