







可视化理解一:
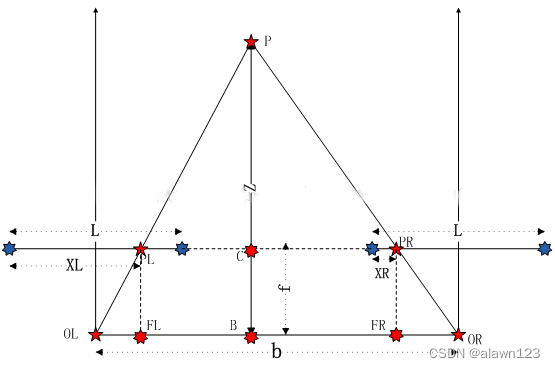
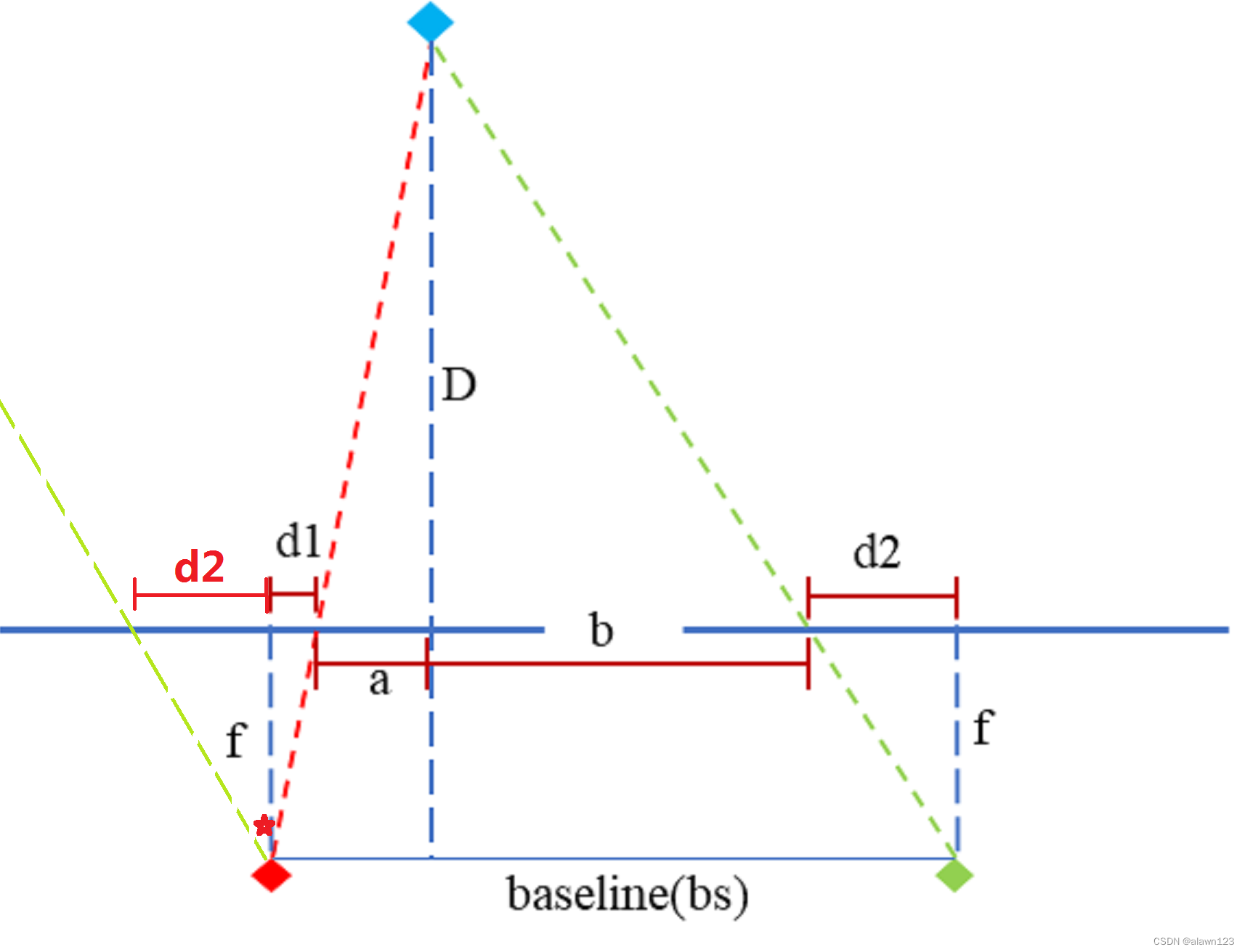
如上图所示,我们要求解的像素深度就是D表示的是空间点到基线(baseline)的距离。而两个像素之间的视差呢,可以理解为d1+d2 。
这里有个问题:当拍摄物体在两个相机轴线之间时,视差是d1+d2,如上所述。
下面这种情况怎么办?视差变成减法了。如何用统一的公式表示?见下面的表述。
如何用统一的公式表示视差公式?见下面的表述。
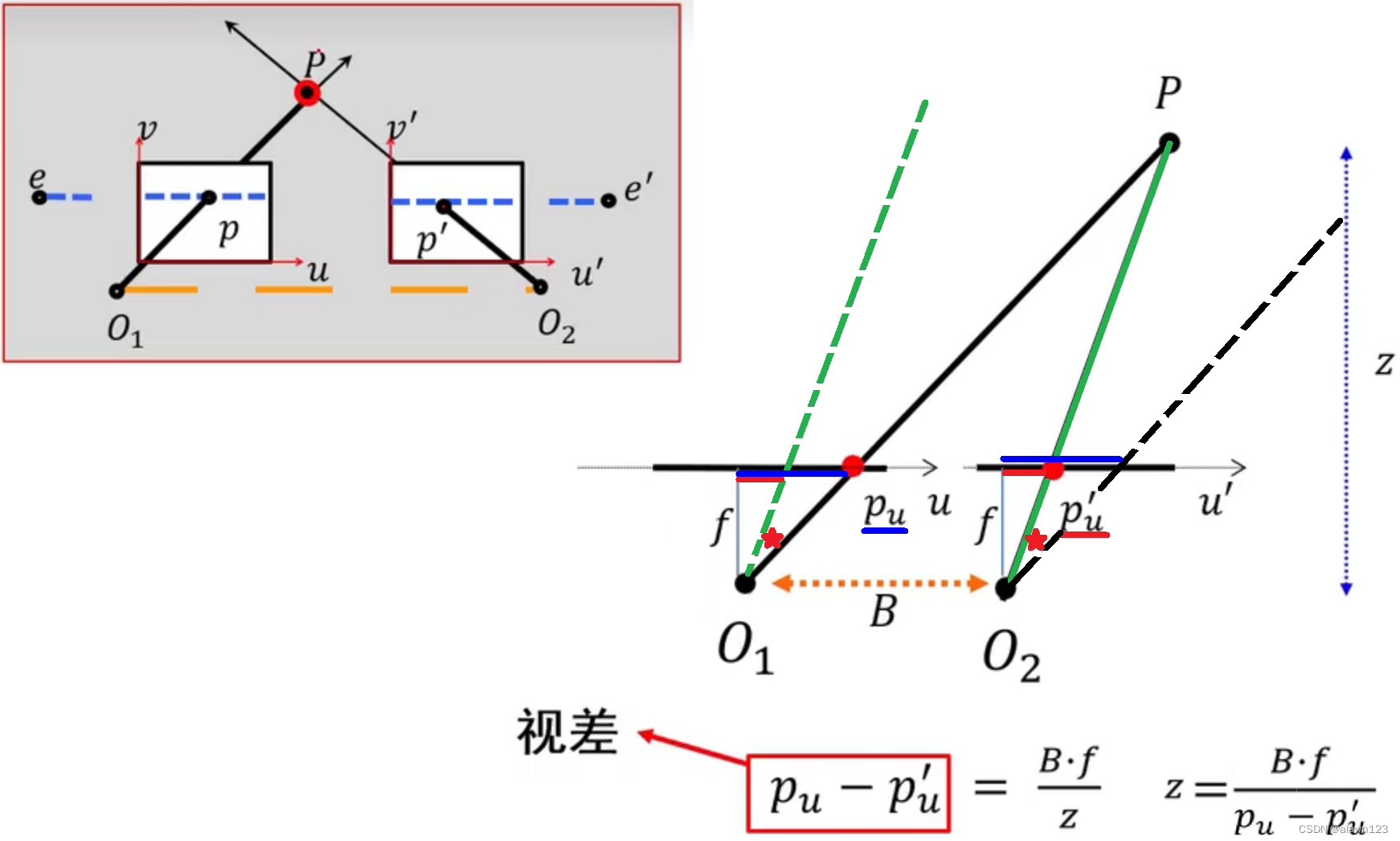
可视化理解二:
相机成像的模型如下:
如上图所示,我们要求解的像素深度就是D表示的是空间点到基线(baseline)的距离。而两个像素之间的视差呢,可以理解为d1+d2 。
这里有个问题:当拍摄物体在两个相机轴线之间时,视差是d1+d2,如上所述。
下面这种情况怎么办?视差变成减法了。如何用统一的公式表示?见下面的表述。
如何用统一的公式表示视差公式?见下面的表述。
相机成像的模型如下:
 1万+
5417
2449
1万+
5417
2449

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























