






 本文对比分析了RoIPooling和RoIAlign两种用于目标检测中区域提议映射的技术。RoIPooling通过量化操作将不同大小的ROI映射到固定大小的特征图,但存在像素偏差问题。RoIAlign则采用双线性插值法,避免量化误差,提高小目标检测精度。
本文对比分析了RoIPooling和RoIAlign两种用于目标检测中区域提议映射的技术。RoIPooling通过量化操作将不同大小的ROI映射到固定大小的特征图,但存在像素偏差问题。RoIAlign则采用双线性插值法,避免量化误差,提高小目标检测精度。
功能:将不同size的ROI区域映射到固定大小的feature map上
1.RoIPooling
这个可以在Faster RCNN中使用以便使生成的候选框region proposal映射产生固定大小的feature map
先贴出一张图,接着通过这图解释RoiPooling的工作原理
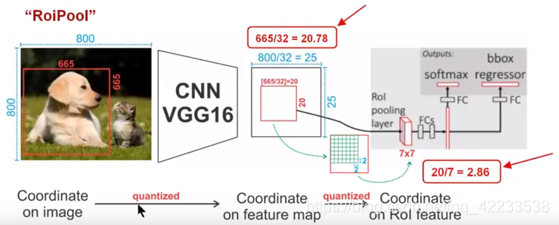
针对上图
1)Conv layers使用的是VGG16,feat_stride=32(即表示,经过网络层后图片缩小为原图的1/32),原图800*800,最后一层特征图feature map大小:25*25
2)假定原图中有一region proposal,大小为665*665,这样,映射到特征图中的大小:665/32=20.78,即20.78*20.78,如果你看过Caffe的Roi Pooling的C++源码,在计算的时候会进行取整操作,于是,进行所谓的第一次量化,即映射的特征图大小为20*20
3)假定pooled_w=7,pooled_h=7,即pooling后固定成7*7大小的特征图,所以,将上面在 feature map上映射的20*20的 region proposal划分成49个同等大小的小区域,每个小区域的大小20/7=2.86,即2.86*2.86,此时,进行第二次量化,故小区域大小变成2*2;经过这两次量化,候选区域已经出现了较明显的偏差(如图中绿色部分所示)
4)每个2*2的小区域里,取出其中最大的像素值,作为这一个区域的‘代表’,这样,49个小区域就输出49个像素值,组成7*7大小的feature map
总结,所以,通过上面可以看出,经过两次量化,即将浮点数取整,原本在特征图上映射的20*20大小的region proposal,偏差成大小为14*14的,这样的像素偏差势必会对后层的回归定位产生影响
它的缺点:由于两次量化带来的误差;
(1)将候选框边界量化为整数点坐标值。
(2)将量化后的边界区域平均分割成 k x k 个单元(bin),对每一个单元的边界进行量化。
所以,产生了替代方案,RoiAlign
2.RoIAlign
ROI Align的思路很简单:取消量化操作,使用双线性内插的方法获得坐标为浮点数的像素点上的图像数值,从而将整个特征聚集过程转化为一个连续的操作
这个是在Mask RCNN中使用以便使生成的候选框region proposal映射产生固定大小的feature map时提出的
先贴出一张图,接着通过这图解释RoiAlign的工作原理
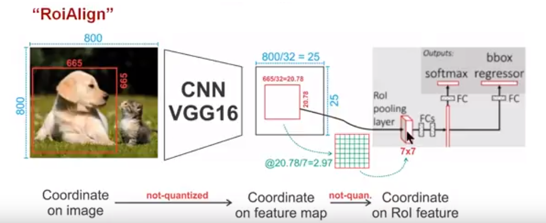
同样,针对上图,有着类似的映射
1)Conv layers使用的是VGG16,feat_stride=32(即表示,经过网络层后图片缩小为原图的1/32),原图800*800,最后一层特征图feature map大小:25*25
2)假定原图中有一region proposal,大小为665*665,这样,映射到特征图中的大小:665/32=20.78,即20.78*20.78,此时,没有像RoiPooling那样就行取整操作,保留浮点数
3)假定pooled_w=7,pooled_h=7,即pooling后固定成7*7大小的特征图,所以,将在 feature map上映射的20.78*20.78的region proposal 划分成49个同等大小的小区域,每个小区域的大小20.78/7=2.97,即2.97*2.97
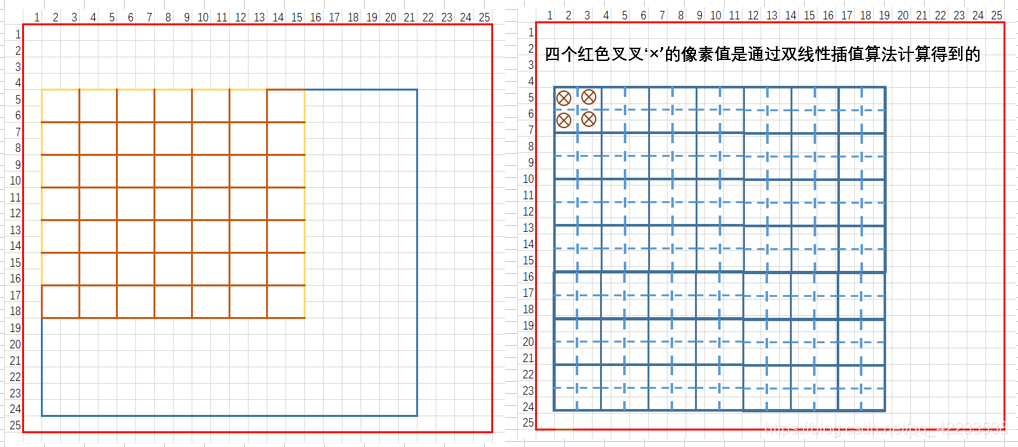
4)假定采样点数为4,即表示,对于每个2.97*2.97的小区域,平分四份,每一份取其中心点位置,而中心点位置的像素,采用双线性插值法进行计算,这样,就会得到四个点的像素值,如下图
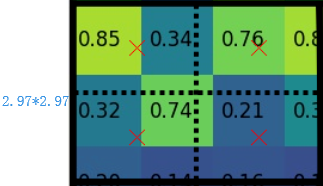
上图中,四个红色叉叉‘×’的像素值是通过双线性插值算法计算得到的
最后,取四个像素值中最大值作为这个小区域(即:2.97*2.97大小的区域)的像素值,如此类推,同样是49个小区域得到49个像素值,组成7*7大小的feature map
总结:知道了RoiPooling和RoiAlign实现原理,在以后的项目中可以根据实际情况进行方案的选择;对于检测图片中大目标物体时,两种方案的差别不大,而如果是图片中有较多小目标物体需要检测,则优先选择RoiAlign,更精准些....
| RoIPooling | RoIAlign |

















 825
825

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









