



 本文解决了一个在Turtlebot Gazebo仿真过程中遇到的问题:无法启动depthimage_to_laserscan节点。通过搜索ROS官网找到了该节点的功能包,并提供了从GitHub下载并安装的详细步骤。
本文解决了一个在Turtlebot Gazebo仿真过程中遇到的问题:无法启动depthimage_to_laserscan节点。通过搜索ROS官网找到了该节点的功能包,并提供了从GitHub下载并安装的详细步骤。
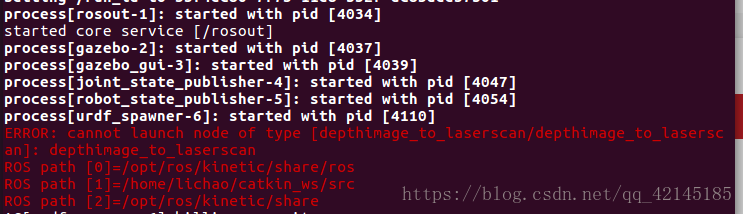
我在对turtlebot机器人进行gazebo仿真时出现ERROR: cannot launch node of type [depthimage_to_laserscan/depthimage_to_laserscan]: depthimage_to_laserscan
在官网搜depthimage_to_laserscan节点功能包,找到:http://wiki.ros.org/action/fullsearch/depthimage_to_laserscan?action=fullsearch&context=180&value=linkto%3A%22depthimage_to_laserscan%22
找到Source: git https://github.com/ros-perception/depthimage_to_laserscan.git (branch: indigo-devel)
打开命令窗口,进入工作空间catkin_ws/src,输入下面的指令就能下载了:
git clone https://github.com/ros-perception/depthimage_to_laserscan

















 1249
1249

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









