







问题回顾:
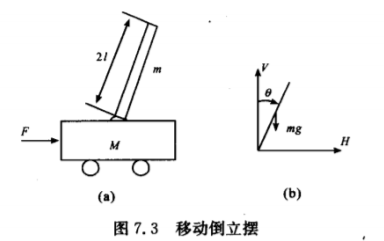
例7.22考虑图7.3所示的移动倒立摆。设M=2kg,m=0.1kg,l=0.5m。设计带降维观测器的状态反馈系统使得倒立摆在垂直位置。
建立模型
易得,该系统状态空间模型为:
[ x ˙ 1 x ˙ 3 x ˙ 2 x ˙ 4 ] = [ 0 0 1 0 0 0 0 1 3 ( M + m ) g ( 4 M + m ) l 0 0 0 − 3 m g 4 M + m 0 0 0 ] [ x 1 x 3 x 2 x 4 ] + [ 0 0 − 3 ( 4 M + m ) l 4 4 M + m ] F y = [ 1 0 0 0 0 1 0 0 ] [ x 1 x 3 x 2 x 4 ] \begin{bmatrix} \dot x_1 \\ \dot x_3 \\ \dot x_2 \\ \dot x_4 \end{bmatrix} = \begin{bmatrix} 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \\ \frac{3(M+m)g}{(4M+m)l} & 0 & 0 & 0 \\ -\frac{3mg}{4M+m} & 0 & 0 & 0 \end{bmatrix} \begin{bmatrix} x_1 \\ x_3 \\ x_2 \\ x_4 \end{bmatrix} + \begin{bmatrix} 0 \\ 0 \\ - \frac{3}{(4M+m)l} \\ \frac{4}{4M+m} \end{bmatrix} F \\ y = \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \end{bmatrix} \begin{bmatrix} x_1 \\ x_3 \\ x_2 \\ x_4 \end{bmatrix} ⎣⎢⎢⎡x˙1x˙3x˙2x˙4⎦⎥⎥⎤=⎣⎢⎢⎡00(4M+m)l3(M+m)g−4M+m3mg000010000100⎦⎥⎥⎤
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1426
1426

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









