




 本文分享了在Ubuntu 14.04环境下安装ROS Indigo过程中遇到的多个问题及解决方法,包括依赖包未满足、rosdep命令缺失、配置环境问题等,适合初次接触ROS的开发者参考。
本文分享了在Ubuntu 14.04环境下安装ROS Indigo过程中遇到的多个问题及解决方法,包括依赖包未满足、rosdep命令缺失、配置环境问题等,适合初次接触ROS的开发者参考。
安装ros过程中的问题及解决方法
- 本人是青岛科技大学15级测控技术与仪器的毕业生。第一次用这个,自己在安装ROS时(ubuntu14.04)出现了特别多的问题,记录下来,作为参考。如果有错误,请指出并通知我改正,谢谢,至于安装方法流程,翔实的帖子网上多的不能再多,就不列举,本帖只指出各种错误及解决方法。
安装ROS-indigo
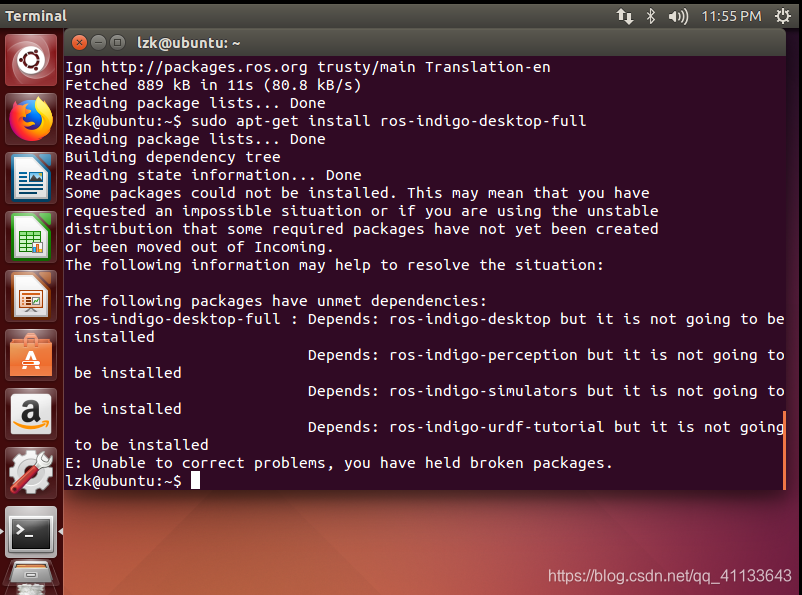
The following packages have unmet dependencies:
ros-indigo-desktop-full : Depends: ros-indigo-desktop but it is not going to be installed
Depends: ros-indigo-perception but it is not going to be installed
Depends: ros-indigo-simulators but it is not going to be installed
Depends: ros-indigo-urdf-tutorial but it is not going to be installed
E: Unable to correct problems, you have held broken packages.
解决方法
使用 sudo aptitude install(安装包) 和 sudo aptitude string(搜索包)指令进行分别查找安装。
初始化ros时
出现如下错误

解决方法 使用sudo rm /etc/ros/rosdep/sources.list.d/20-default.list进行删除操作。注意:此时不能root。
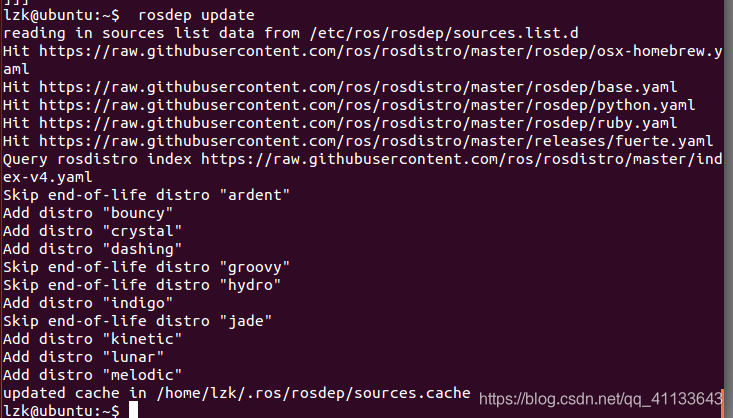
如果出现roedep命令却缺失(commond not found)执行如下指令
遇到问题rosdep命令添加方法sudo apt install python-rosdep来安装rosdep。
注:在执行rosdep update时,可能出现提示错误,建议多执行几次,实在不行退回安装部分(上标题)查找问题。如下
配置环境问题
极有可能出现bash警告,解决办法使用 gedit ~/.bashrc指令打开文档,找到bash提示的并删除保存即可。此时查看是不是安装完全了。因为我之前安装时因为包的不完整错过了很多。
最后执行命令配置环境完成后执行roscore出现错误如下图
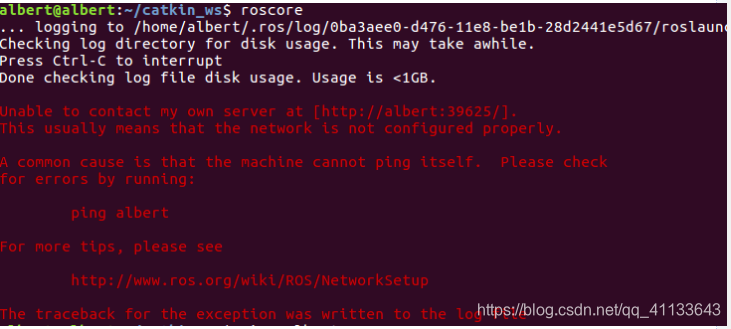
解决办法(在bashrc(gedit~/.bushrc)第二行加上环境)
export ROS_HOSTNAME=localhost
export ROS_MASTER_URI=http://localhost:11311
使其如下
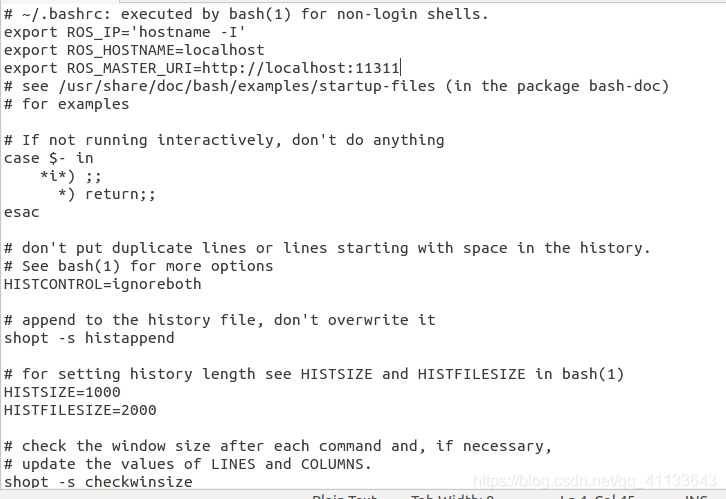
之后保存退出即可。
小乌龟
注意,在用方向键操控时,要将鼠标留在含有命令rosrun turtlesim turtle_teleop_key的terminal上。

















 2600
2600

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









