







 本文介绍了相机标定的基本概念,包括内参矩阵、焦距等关键术语,并详细解释了使用棋盘格进行相机标定的具体步骤。通过Matlab APP Scaleracalibrator可以有效地测量相机的内部参数。
本文介绍了相机标定的基本概念,包括内参矩阵、焦距等关键术语,并详细解释了使用棋盘格进行相机标定的具体步骤。通过Matlab APP Scaleracalibrator可以有效地测量相机的内部参数。
在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。在大多数条件下这些参数必须通过实验与计算才能得到,这个求解参数的过程就称之为相机标定(或摄像机标定)。
常用术语
| 中文名 | 英文名 |
|---|---|
| 内参矩阵 | Intrinsic Matrix |
| 焦距 | Focal Length |
| 主点 | Principal Point |
| 径向畸变 | Radial Distortion |
| 切向畸变 | Tangential Distortion |
| 旋转矩阵 | Rotation Matrices |
| 平移向量 | Translation Vectors |
| 平均重投影误差 | Mean Reprojection Error |
| 重投影误差 | Reprojection Errors |
| 重投影点 | Reprojected Points |
标定步骤
1、打印一张棋盘格,把它贴在一个平面上,作为标定物。
2、通过调整标定物或摄像机的方向,为标定物拍摄一些不同方向的照片。
3、从照片中提取棋盘格角点。
4、估算理想无畸变的情况下,五个内参和六个外参。
5、应用最小二乘法估算实际存在径向畸变下的畸变系数。
6、极大似然法,优化估计,提升估计精度。
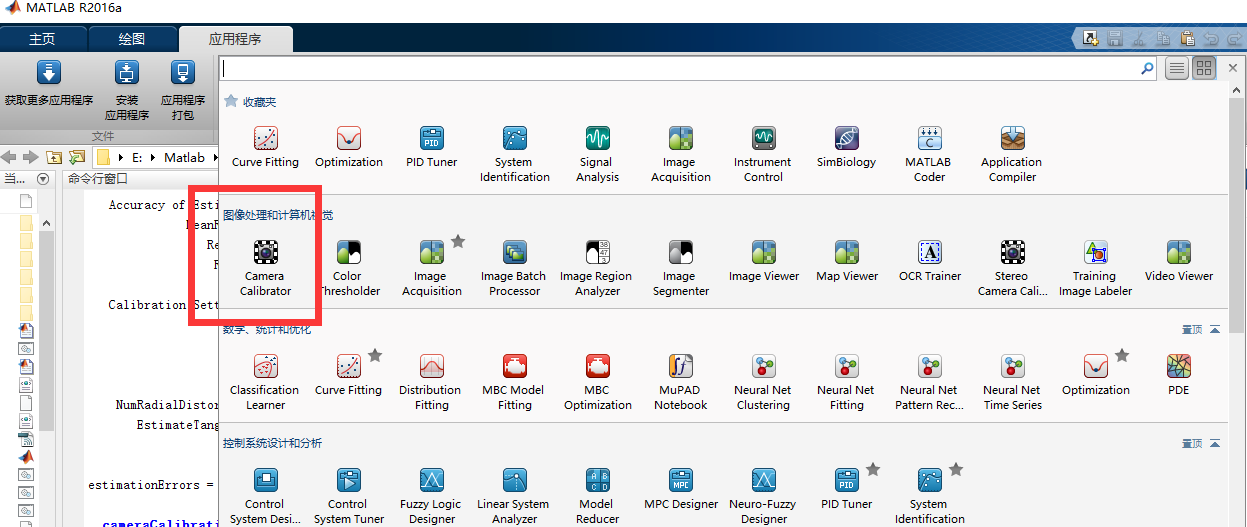
1.打开camera calibrator
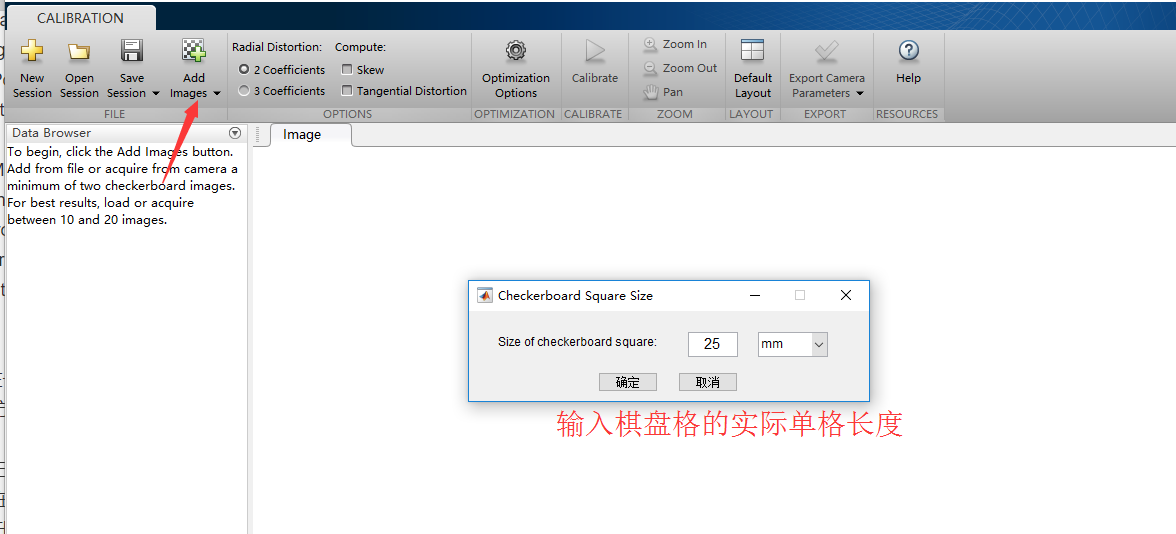
添加多张棋盘格
图片大小要一致,最好加入20张左右为佳,加入完成后点击Calibrate
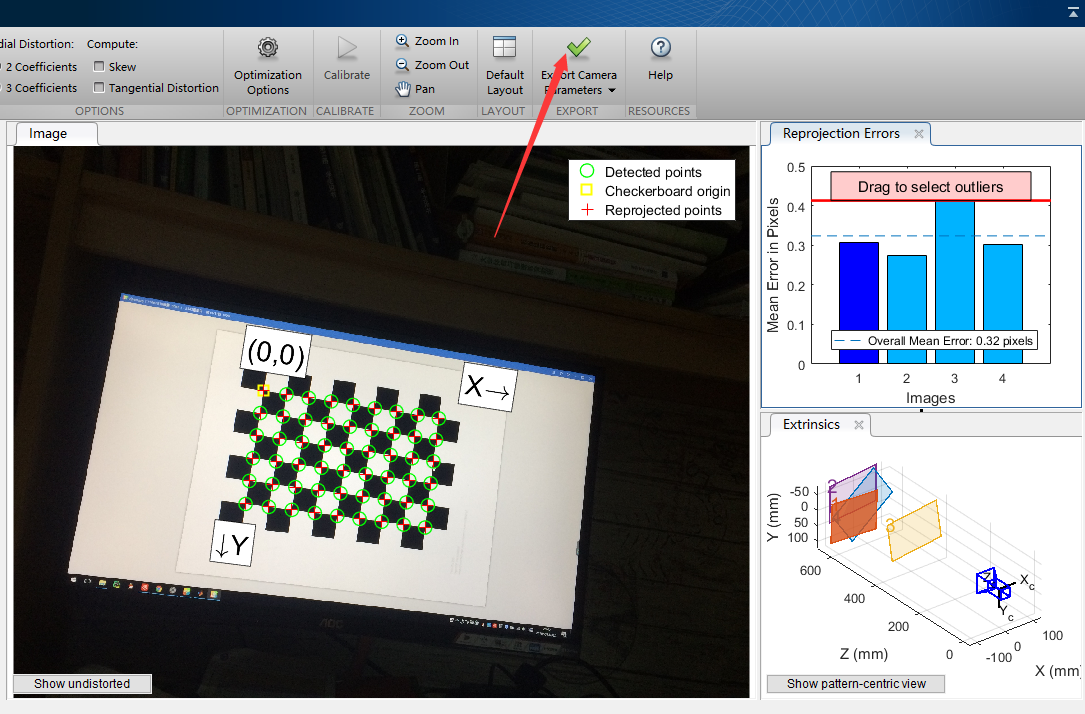
点击Export Camera保存参数
返回到命令窗口,即可看到相机参数,在命令行输入
cameraParams.IntrinsicMatrix可得到内参矩阵和径向畸变
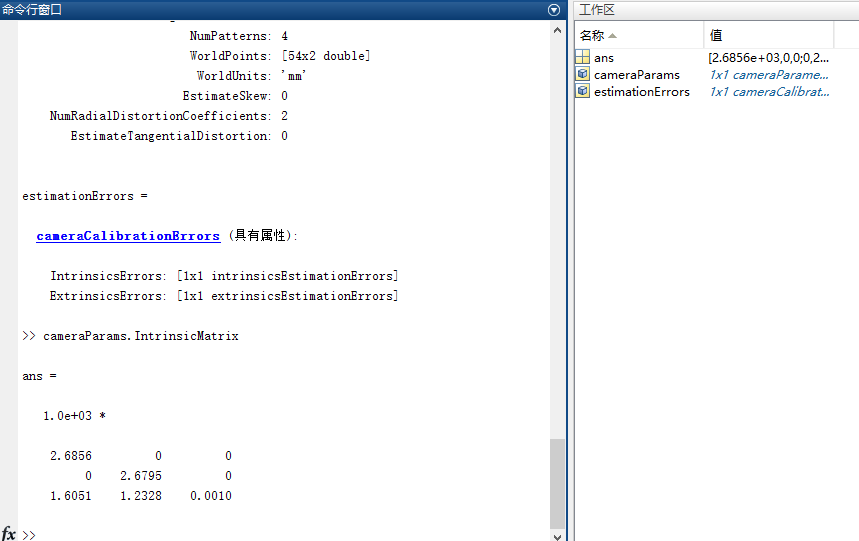
命令行窗口
参考资料:相机标定(Camera calibration)原理、步骤
如何利用Matlab APPS camera calibrator 测相机内部参数!!

















 1132
1132

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









