







[非线性控制理论]1_Lyapunov直接方法
[非线性控制理论]2_不变性原理
[非线性控制理论]3_基础反馈稳定控制器设计
[非线性控制理论]4_反馈线性化_反步法
[非线性控制理论]5_自适应控制器(Adaptive controller)
[非线性控制理论]6_滑模控制
[非线性控制理论]7_High gain and High Frequency
[非线性控制理论]8_三种鲁棒控制器的比较
[非线性控制理论]9_非线性控制理论串讲
非线性控制的笔记就算完了,pdf已经上传网盘了,有需要的可以在公众号“王崇卫”回复“DR_CAN笔记”获取了。
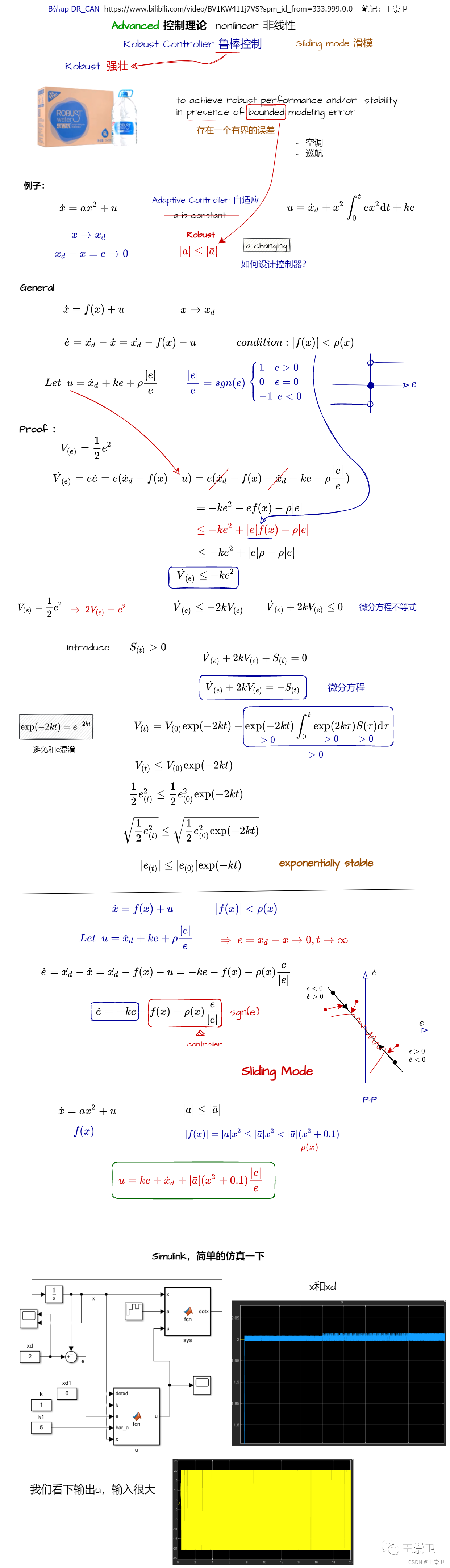
滑模控制 sliding mode control
-
上一讲,up讲了参数a是未知的,但是a是一个常值的情况,我们如何去自适应a。
-
这一讲,条件更苛刻了,当a不再是常数,是变化的,不过是有界的的情况,如何去设计控制器。
-
使用李雅普诺夫数学推导了,设计的u,为什么能使系统稳定。最后证明指数渐进稳定。
-
画出相图分析,就很体现滑模了。两种模式之间,滑来滑去。
-
它的优点也很好的体现,很强的鲁棒性,算法也简单。劣势就是无法严格在滑模面上向平衡点滑动,而是在两侧来回穿越。产生振动,相对应的输入u也很大。


















 7595
7595

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









