




 本文深入探讨了基于优化的视觉惯性里程计(VIO)原理和技术细节,涵盖了最小二乘问题求解、LM算法、鲁棒核函数等内容,并重点介绍了IMU预积分及Jacobian推导。
本文深入探讨了基于优化的视觉惯性里程计(VIO)原理和技术细节,涵盖了最小二乘问题求解、LM算法、鲁棒核函数等内容,并重点介绍了IMU预积分及Jacobian推导。
0. 内容
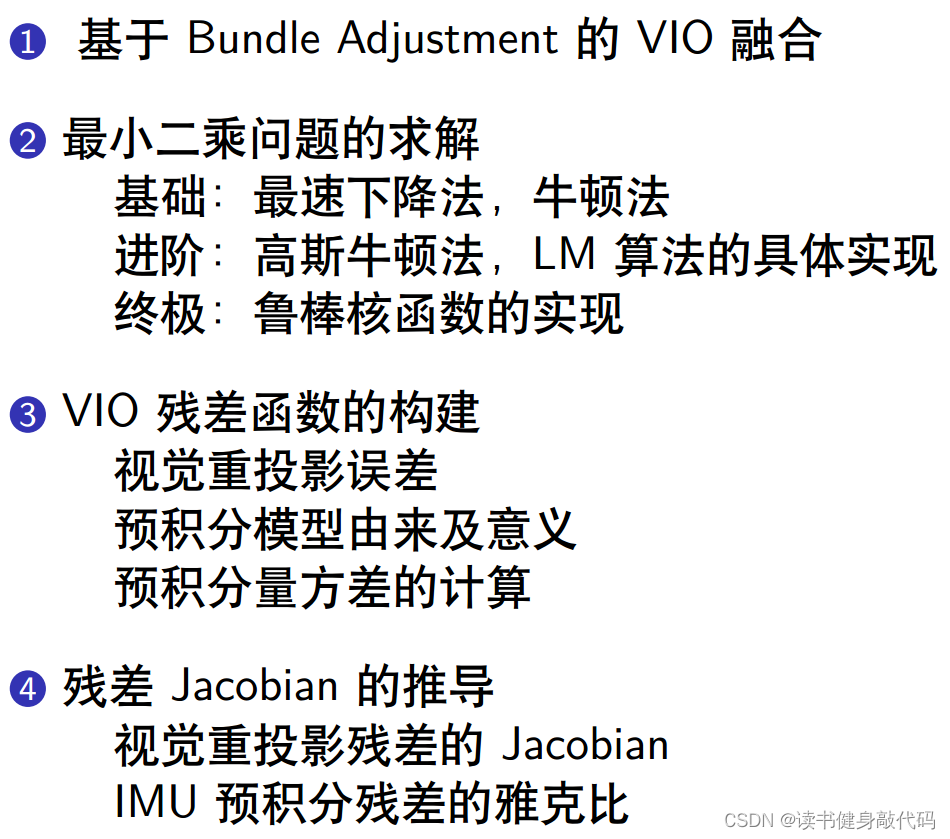
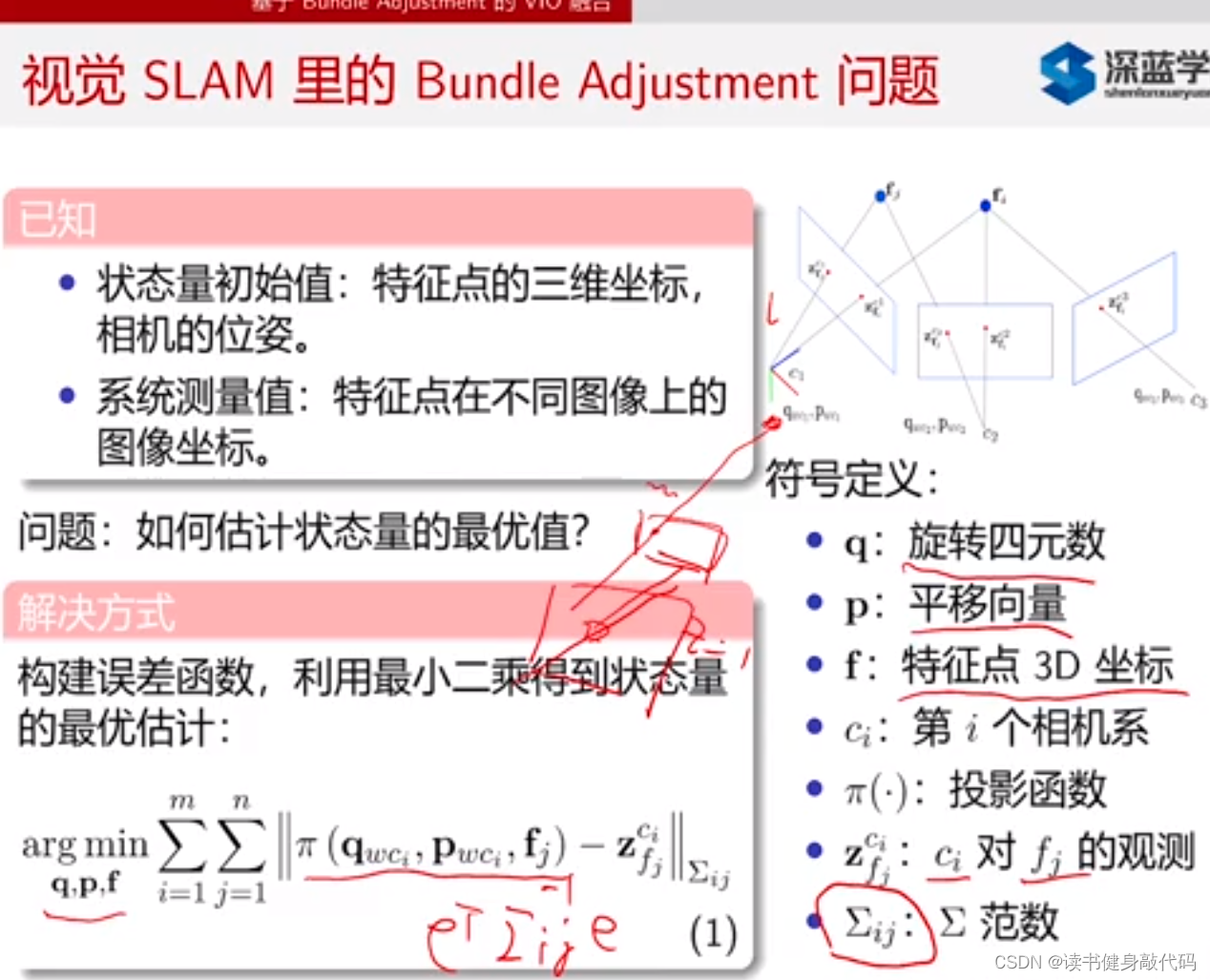
1. 基于BA的VIO融合
优化的方法学会之后,滤波的方法也就会了。
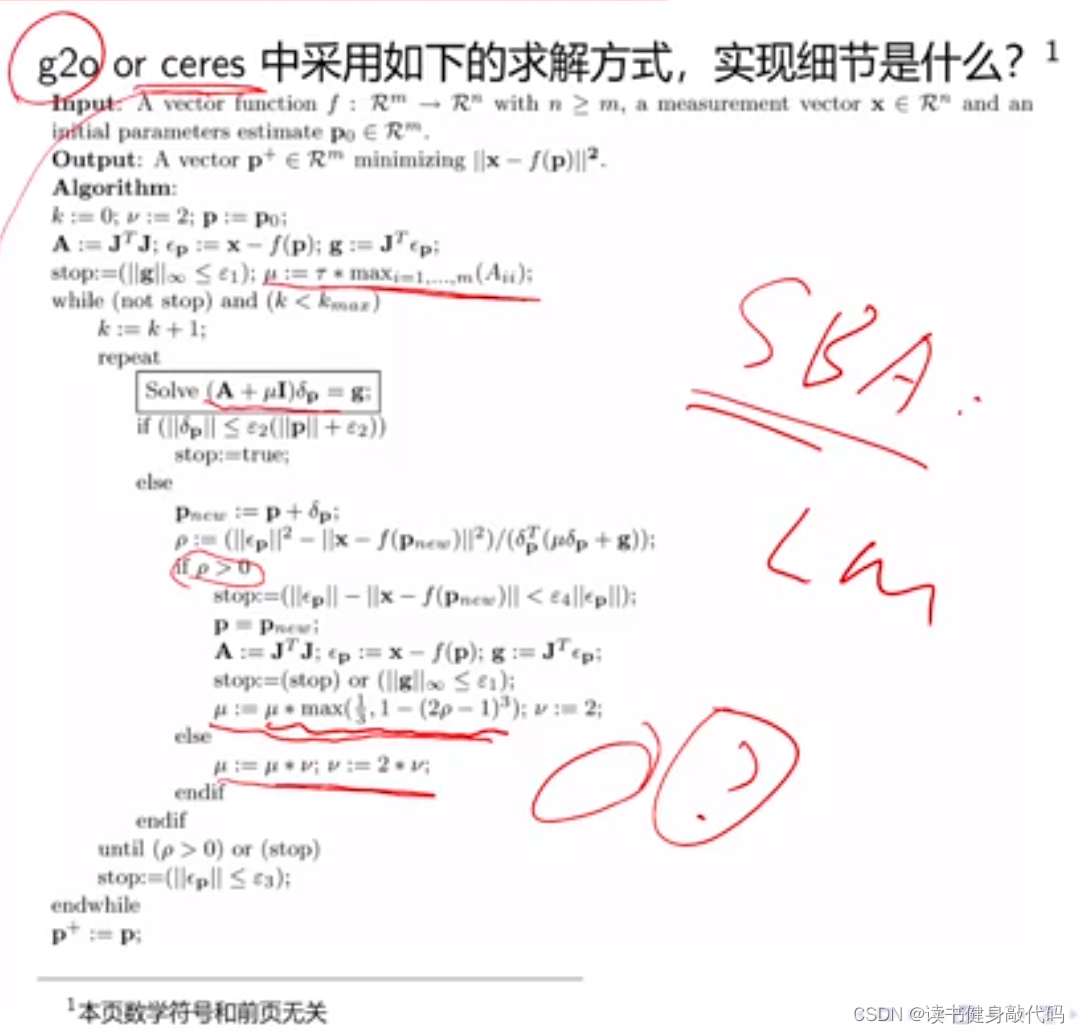
具体的求解BA问题参考的是SBA的论文,使用的是LM算法(里面有个关于权重μ的计算方法,不同人的实现可能不一样,这些都是实现细节)
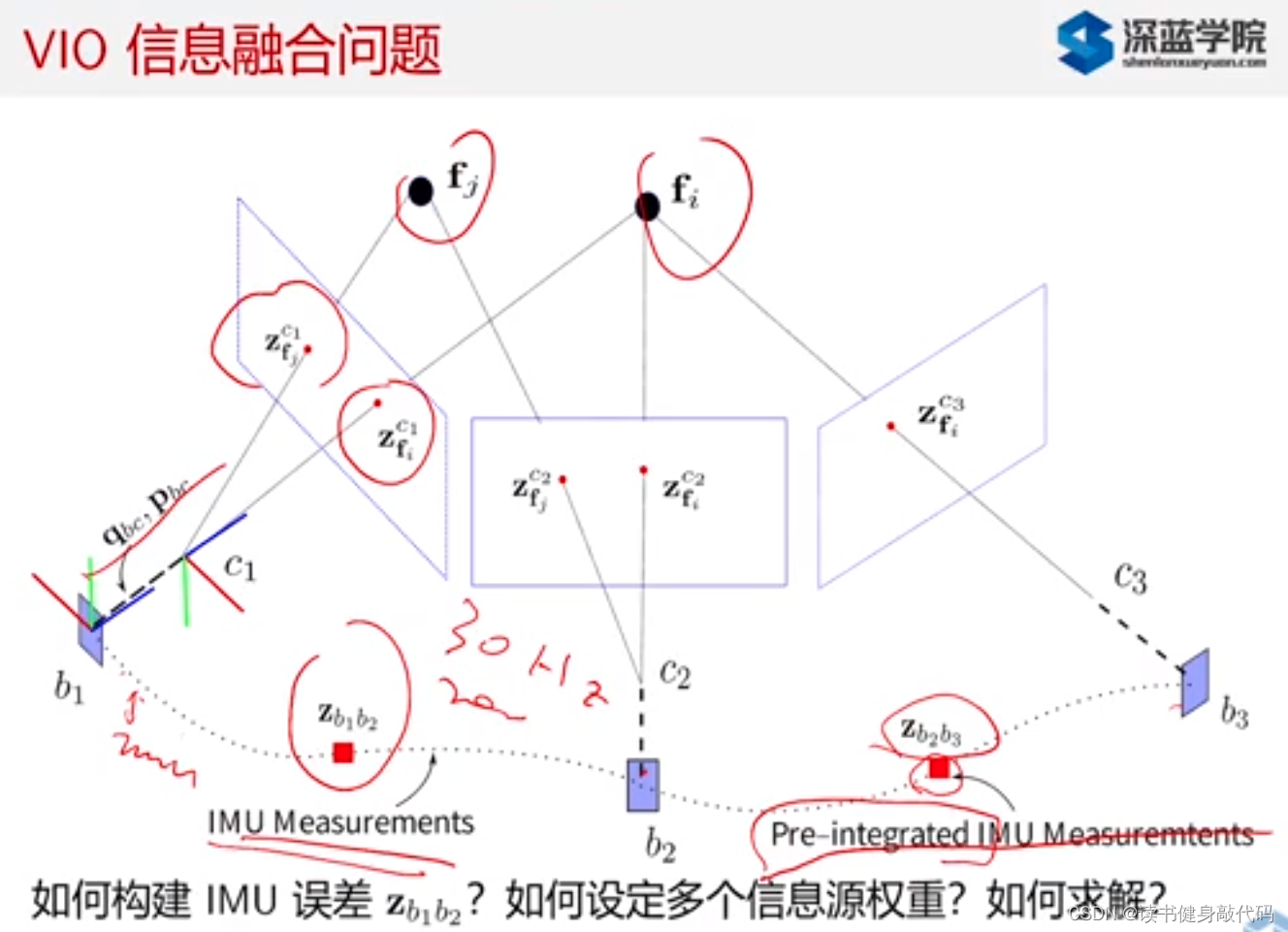
camera两个观测之间的相对位置(pq的变化)可以通过两次观测知道,但是IMU在两个时刻的观测量需要进行积分才能知道,而且IMU数据频率一般比Camera频率高,所以需要逐步地积分才能得到运动情况。
2. 最小二乘问题的求解
牛顿法,将loss function直接Taylor二阶展开,高斯牛顿法是将原函数f(x)一阶展开,再进行求解。
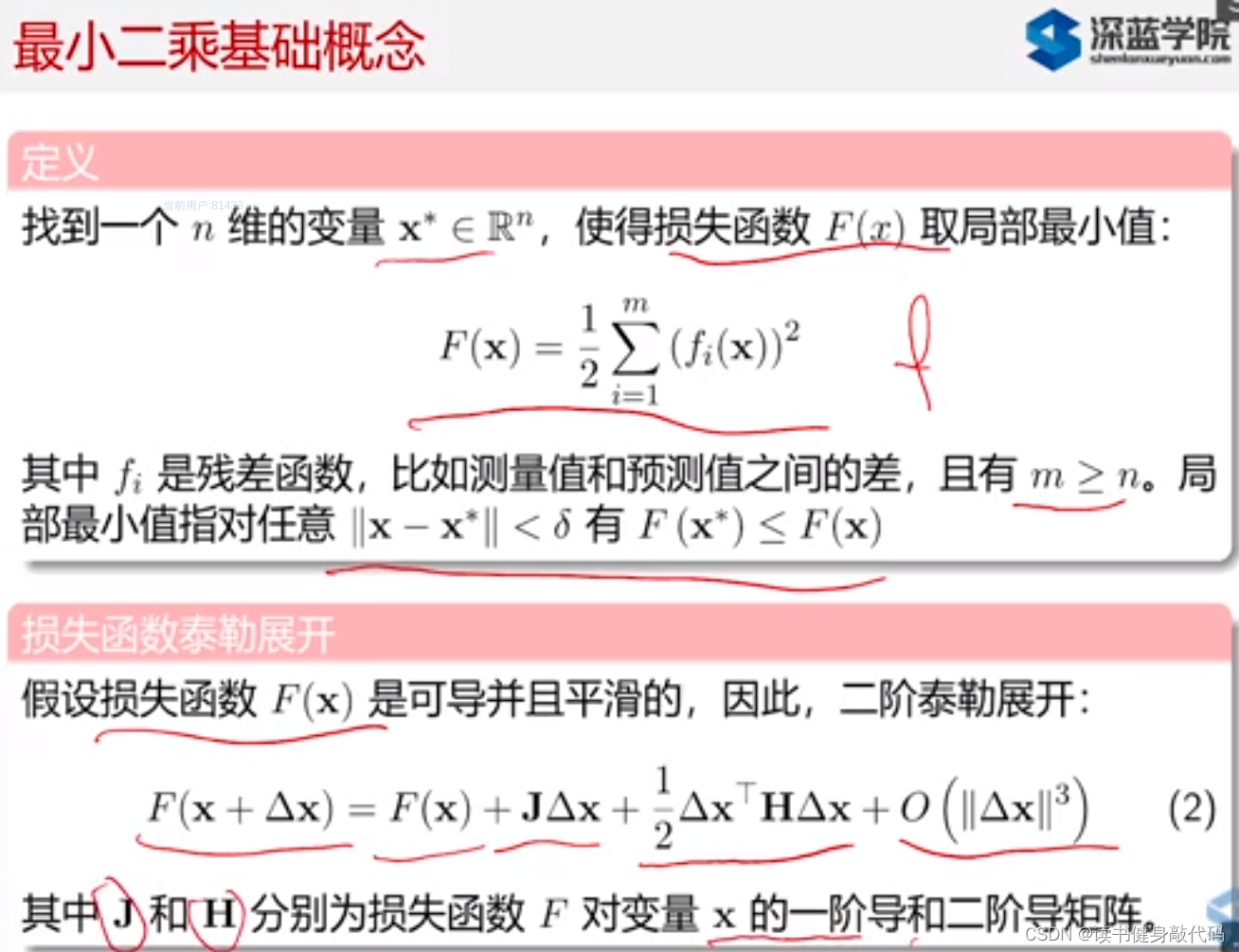
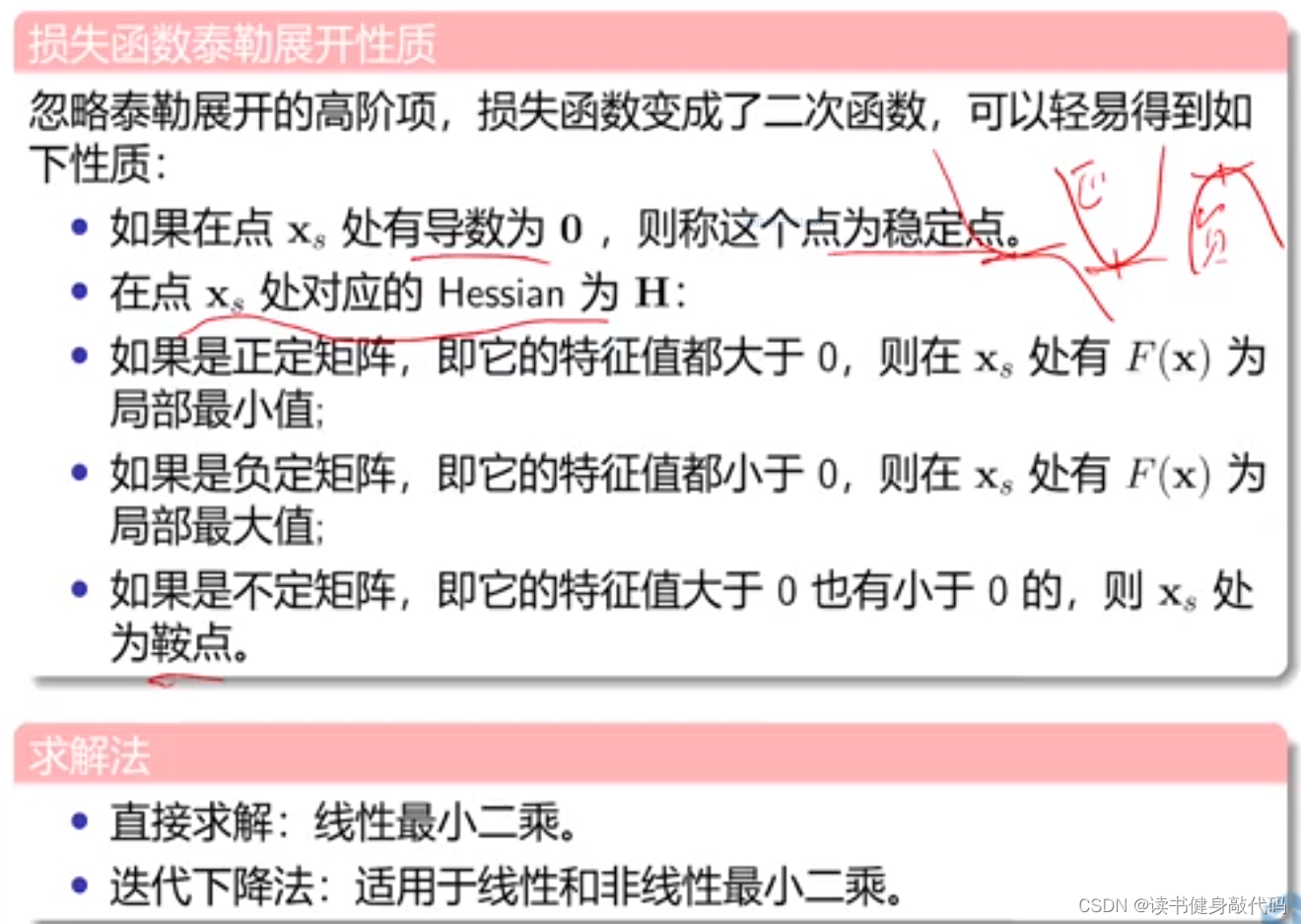
解法分为直接解和迭代解:
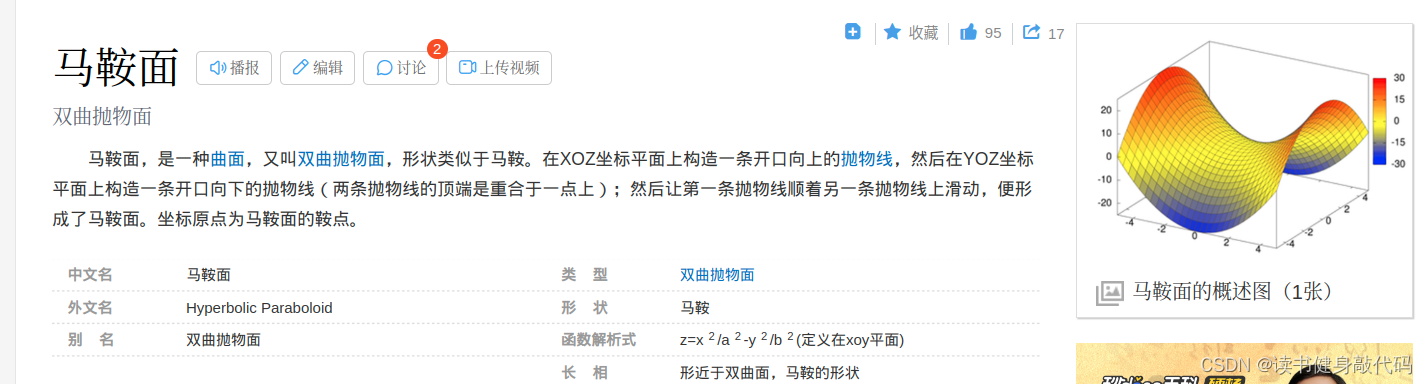
马鞍面复习:
迭代下降法本质上就是在不同的点进行(二阶)泰勒展开,忽略高阶项,展开之后进行优化。
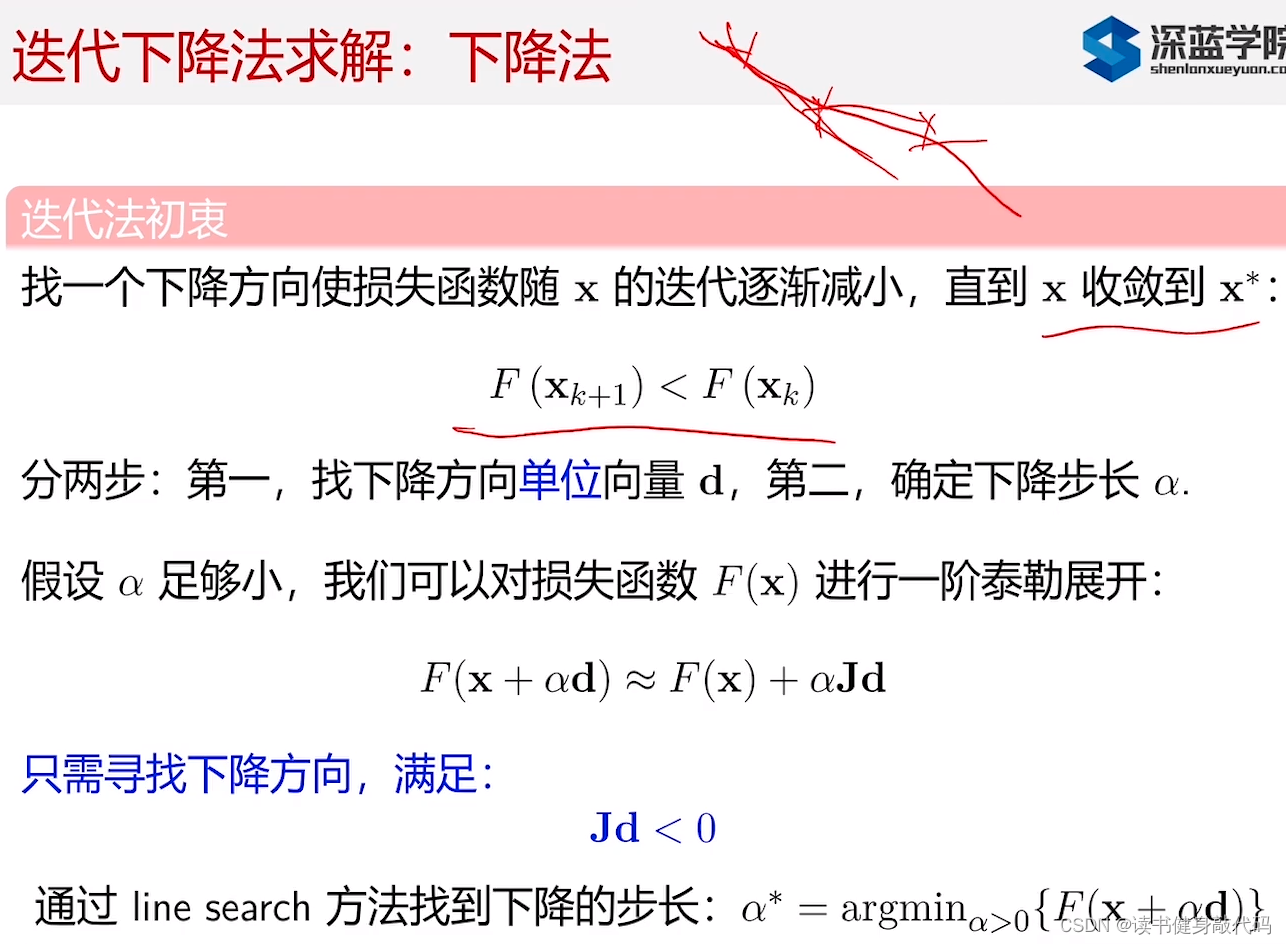
2.1 一阶法
下降法(如果方向选择为梯度反方向则就为DL中的梯度下降法,此处叫最速下降法):
下降法主要是找步长 α \alpha α和方向 d d d
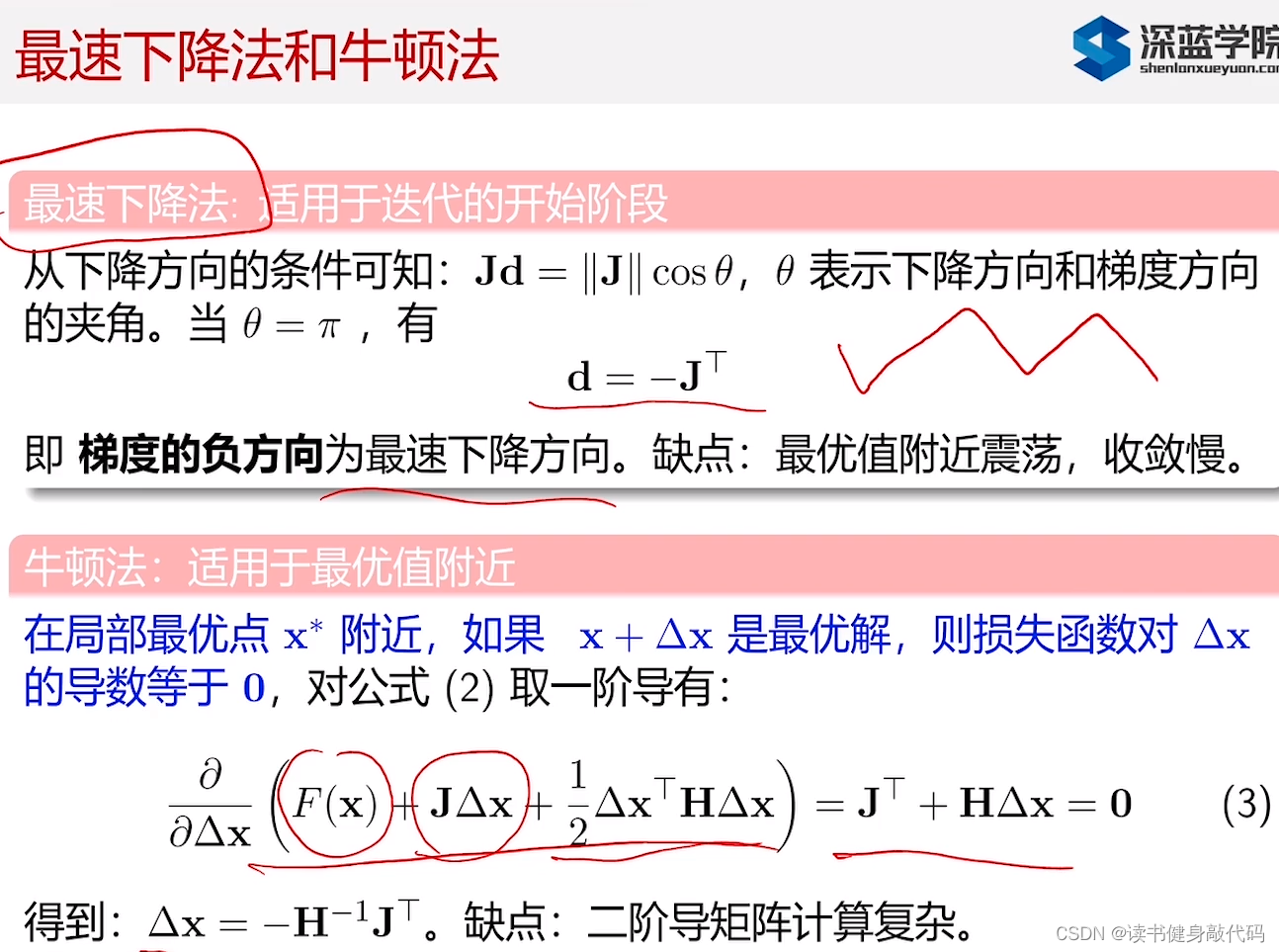
最速下降法:不易收敛;牛顿法:H计算量大。
阻尼法,在牛顿法基础上增加一个 Δ x \Delta x Δx的正则项 1 2 μ Δ x T Δ x \bm{\frac{1}{2}\mu\Delta x^{T}\Delta x} 21μΔxTΔx,使其不会太大(牛顿法和阻尼法实际上是二阶法):
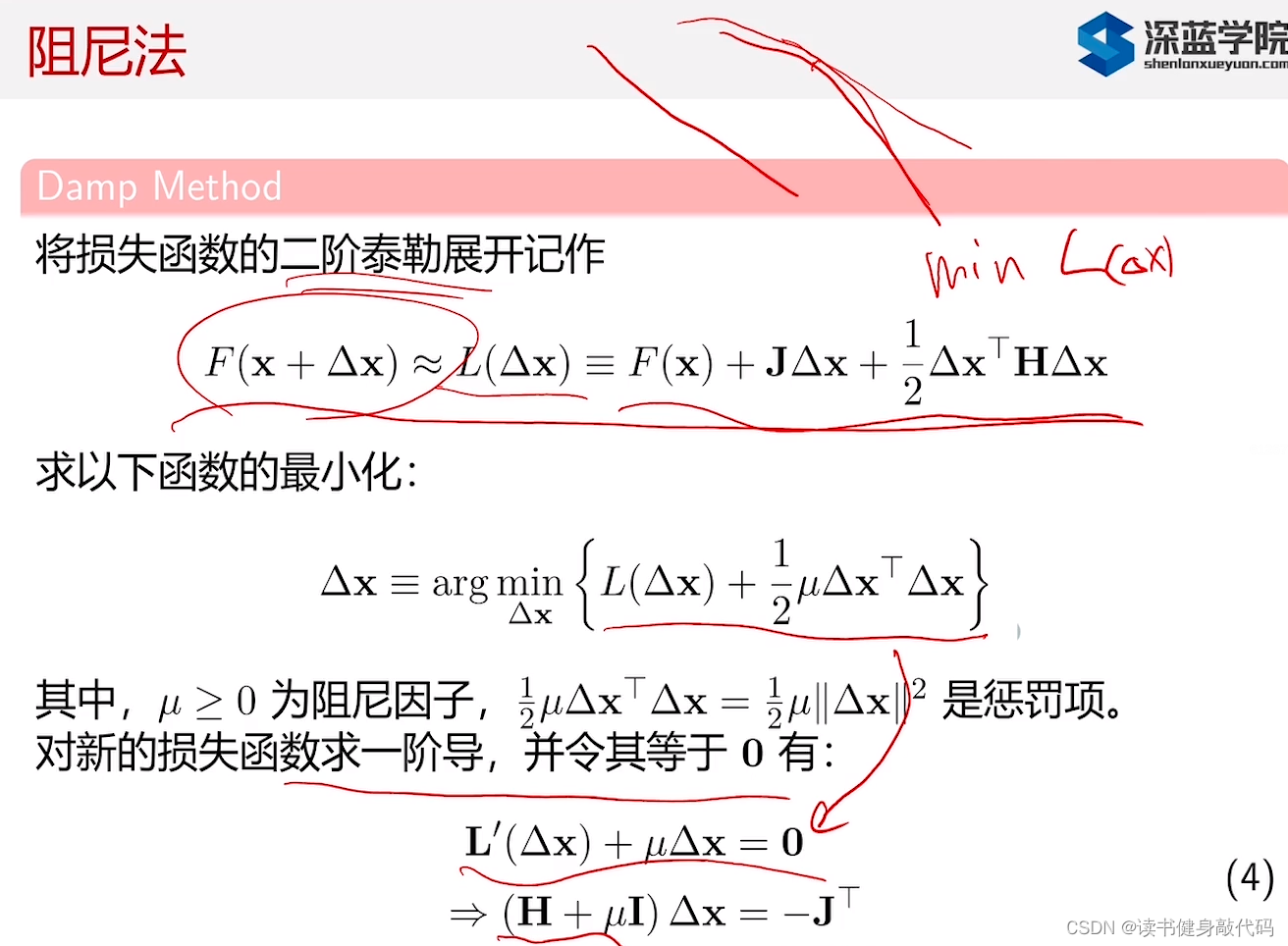
阻尼法的阻尼是加在H上的 μ \mu μ
为方便起见,可将残差stack起来成向量(也可以写成sum of的形式,但向量可供讨论具体小f的一些性质,相应地,雅克比J和海塞H也要相应地写为向量形式)
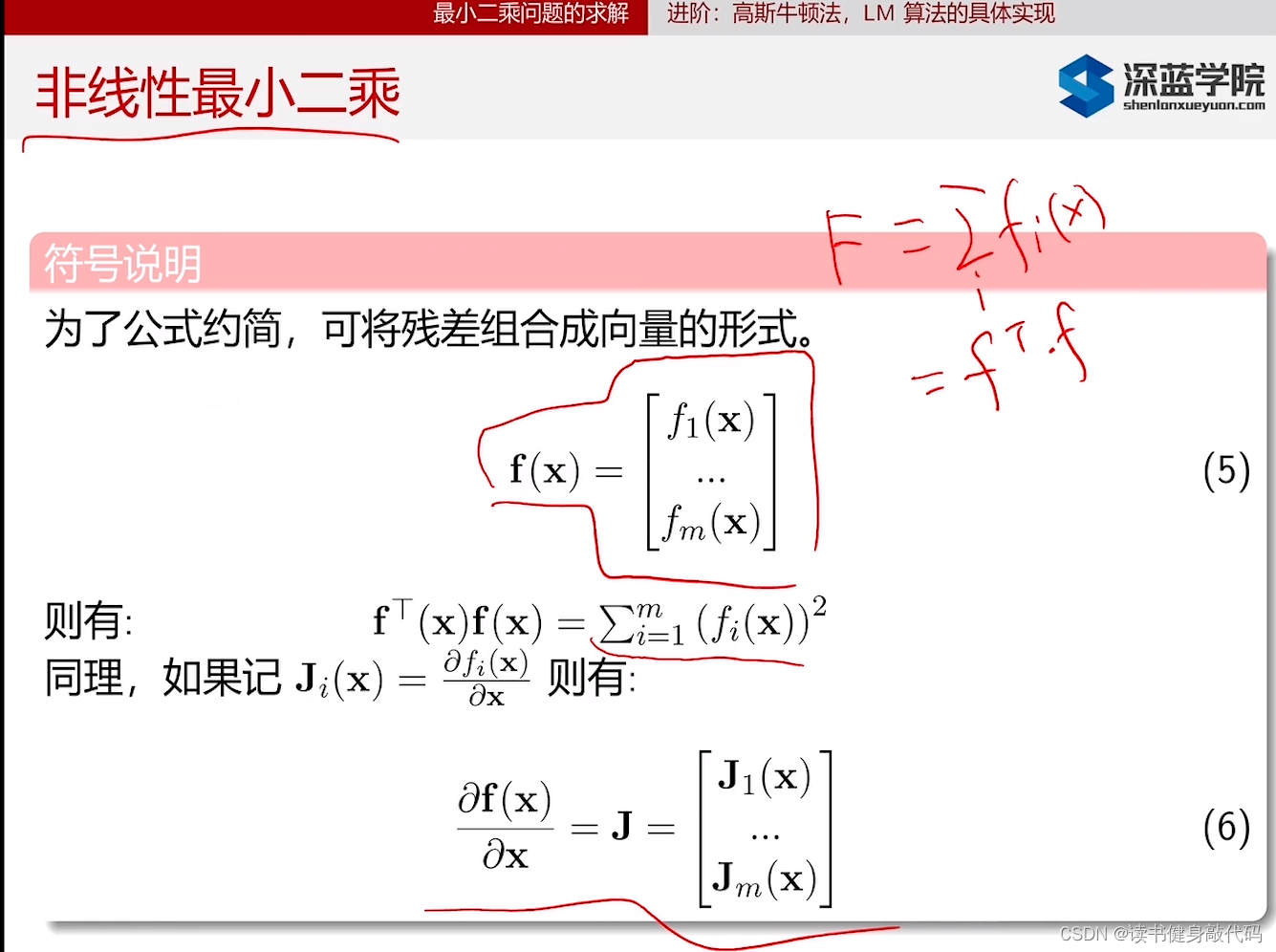
F(x)是cost function,最简单的例子: m i n F ( x ) = 1 2 ∣ ∣ f ( x ) ∣ ∣ 2 2 minF(x)=\frac{1}{2}||f(x)||_2^2 minF(x)=21∣∣f(x)∣∣22
2.2 二阶法
2.2.1 Gauss-Newton
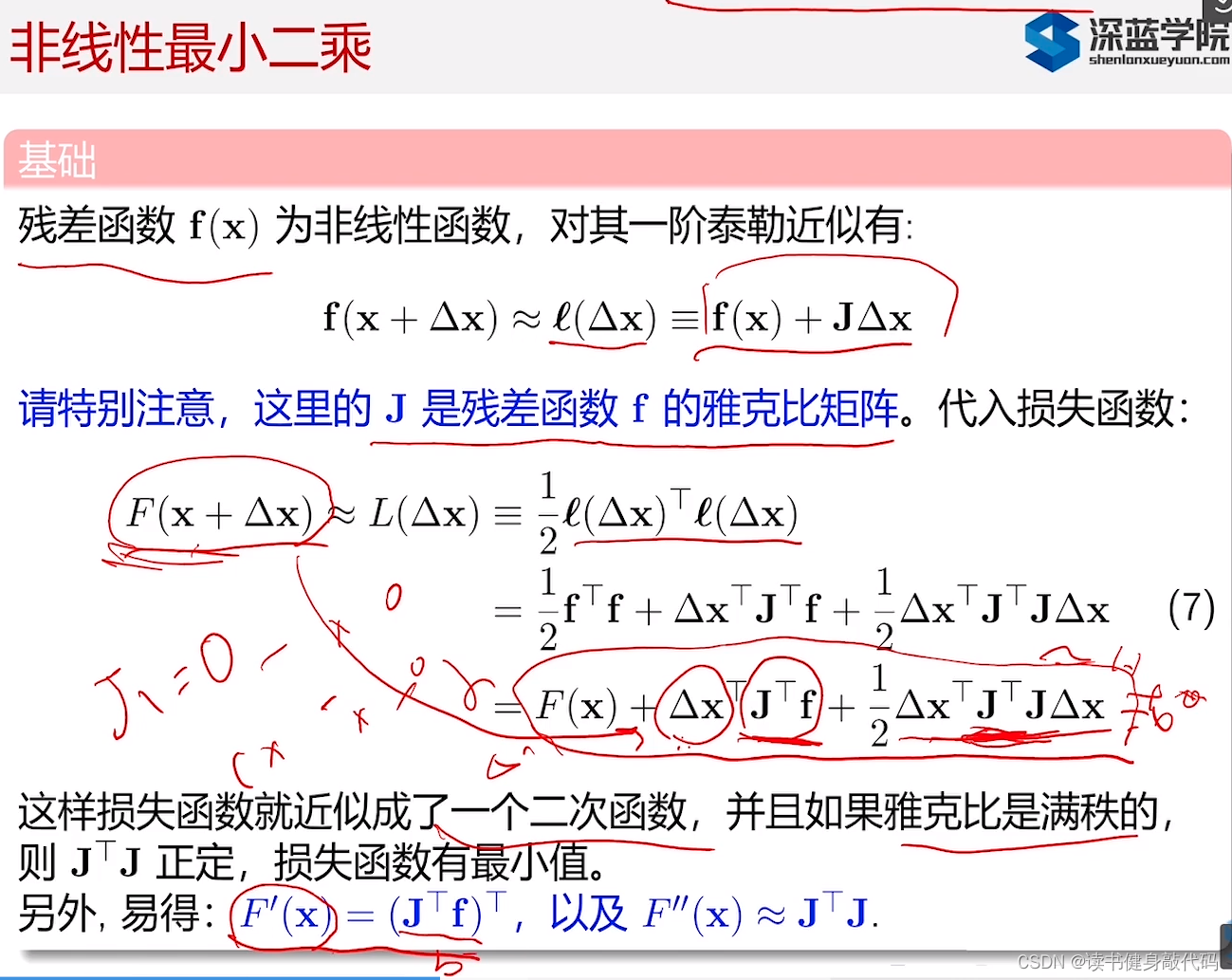
损失函数F(x)对 Δ x \Delta x Δx的一阶导数可记作b,也可直接写F(x) ′ ^\prime ′

具体的可以看《14讲》中的引入(P131),有系数矩阵 D D D和优化半径 μ \mu μ(也就是这里的阻尼因子),当系数矩阵 D = I D=I D=I时,才是上述的形式。
2.2.2 LM
2.2.2.1 LM阻尼因子 μ \mu μ初值的选取方法

- 阻尼的理解:阻尼大小代表一阶近似的占比程度,也就代表了步长更新方向的占比程度,阻尼越大,步长值越小。 ρ \rho ρ很大,则说明在下降,要增大步长加快收敛,减小阻尼 μ \mu μ
ρ < 0 \rho<0 ρ<0,则说明没下降,拒绝本次迭代,减小步长,增大阻尼 μ \mu μ。
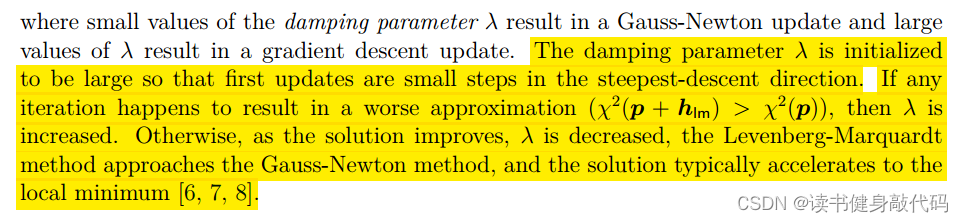
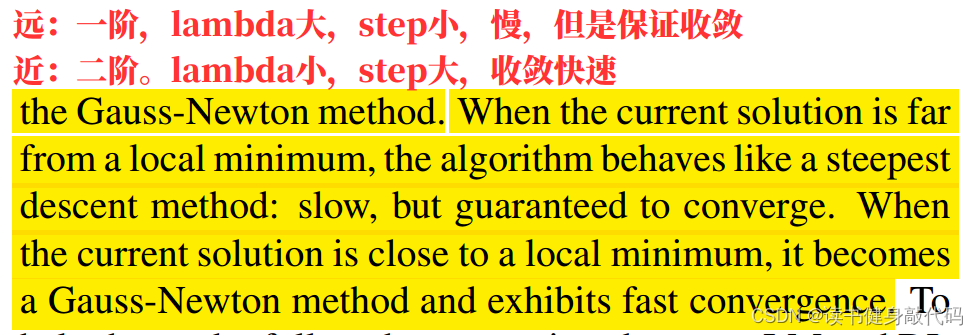
- τ \tau τ的设定是根据经验值而来,当前x距离 x ∗ x^* x∗较近时,取二阶近似,初值 μ 0 \mu_0 μ0就设的小一些,乘较小的 τ \tau τ,距离 x ∗ x^* x∗较远时,初值就设的应该较大,保证下降的较快,取一阶近似,乘接近于1的 τ \tau τ
这里高翔补充了一点,:广义的韦达定理保证所有的特征值 λ i \lambda_i λi之和跟矩阵的trace是一样的。
所以这里取 m a x J T J i i max{J^TJ_{ii}} maxJTJii矩阵的对角线的最大元素是有道理的,即可以有这样的先验: J T J i i J^TJ_{ii} JTJii的对角线最大元素跟 J T J i i J^TJ_{ii} JTJii特征值的最大值是在同一个数量级,所以可取对角线最大元素来近似最大特征值。
2.2.2.2 LM阻尼因子 μ \mu μ的更新策略
定性分析,看上面的 Δ x \Delta x Δx的解析形式,
μ \mu μ处于分母上,增大阻尼 μ \mu μ会减小步长(有负号不一定代表就是负值,只能整体当做正值来理解才说得通),也符合“阻尼”的直观感受:当某次 Δ x \Delta x Δx使得cost function增大,则应该增大阻尼使 Δ x \Delta x Δx变小,减小步长;反之,如果cost function在下降则应该减小阻尼 μ \mu μ,增大步长,加快收敛速度。
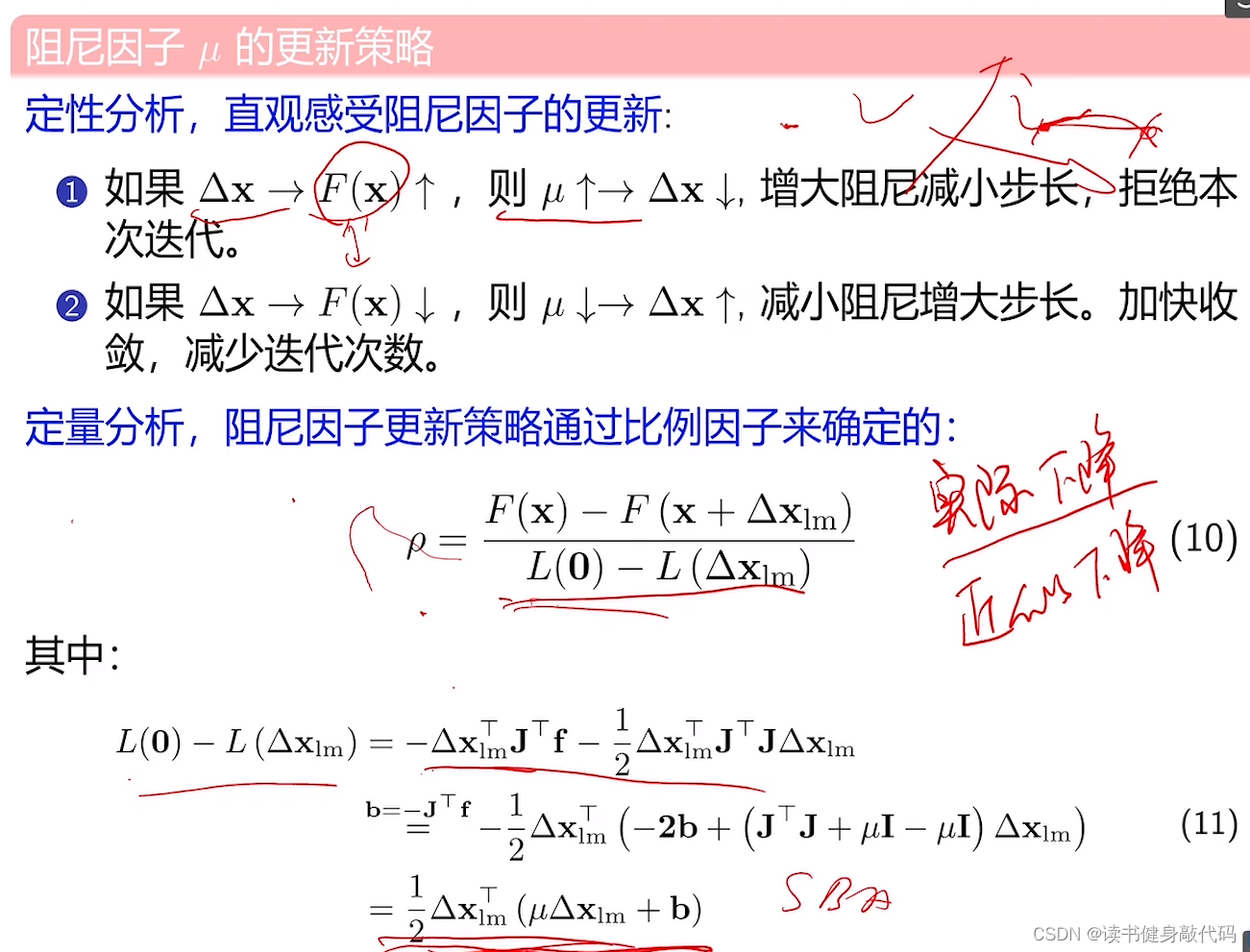
上述推导说明分母一定是>0的,因为寻找的 Δ x \Delta x Δx会使L每次都使得L下降,但是cost function F不一定会下降(因为L是对F的二次近似,理论保证是L每次都会下降,但是实际F不一定下降),所以当 ρ < 0 \rho<0 ρ<0时表示F上升了。
当 ρ \rho ρ>1时代表此时方向是正确的,则应减小 μ \mu μ加快下降速度;如果0< ρ \rho ρ<1则代表则代表实际下降比较小,可能已经到最优值附近,应增大 μ \mu μ减慢下降速度。
Δ x \Delta x Δx越小说明近似的越好,越接近最优值。
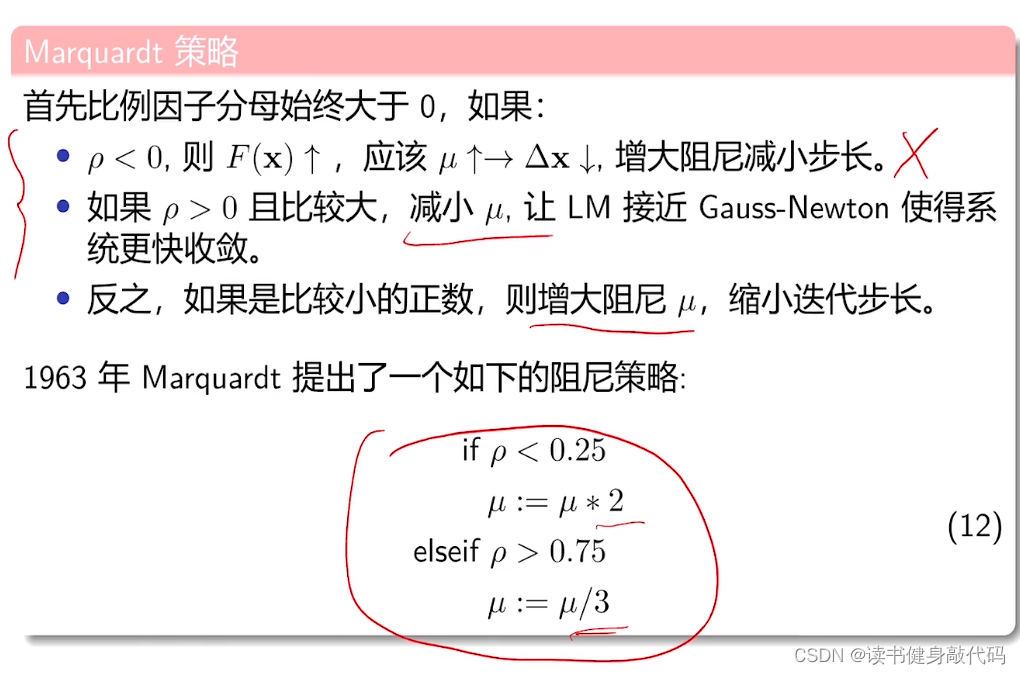
发现了14讲关于这个 μ \mu μ更新策略的一个错误, ρ > 3 4 \rho>\frac{3}{4} ρ>43时应该减小阻尼 μ \mu μ, ρ < 1 4 \rho<\frac{1}{4} ρ<41时应该增大阻尼 μ \mu μ
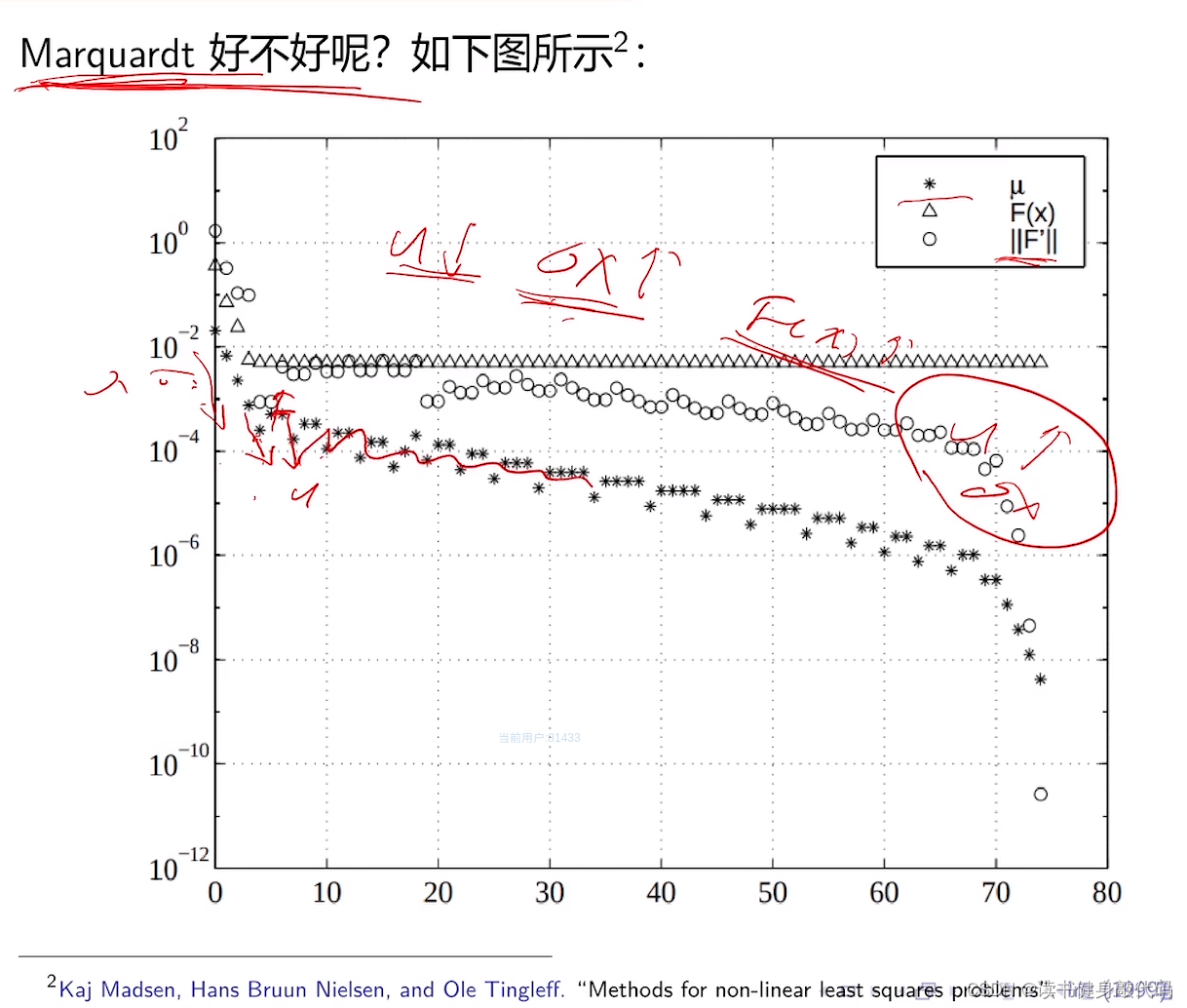
Nielsen采用了新的 ρ \rho ρ的计算策略,分母直接为L,判断 ρ \rho ρ的符号,当F下降时逐渐减小 ρ \rho ρ,当增大时, ρ \rho ρ
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1656
1656

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









