




 本文详细介绍了SLAM轨迹评估工具evo的安装与使用方法,包括数据集格式转换、轨迹显示、绝对位姿误差和相对位姿误差的计算。通过具体命令示例,读者可以快速上手evo工具,进行SLAM算法性能评估。
本文详细介绍了SLAM轨迹评估工具evo的安装与使用方法,包括数据集格式转换、轨迹显示、绝对位姿误差和相对位姿误差的计算。通过具体命令示例,读者可以快速上手evo工具,进行SLAM算法性能评估。
SLAM轨迹评估工具--evo安装及使用
1. evo安装
1.1 更新pip
# 打开终端,笔者是在python2.7基础上更新,当然python3.5更好
pip install --user --upgrade pip
# pip安装numpy和matplotlib,使用清华的镜像
pip install --user --upgrade -i https://pypi.tuna.tsinghua.edu.cn/simple numpy
pip install --user --upgrade -i https://pypi.tuna.tsinghua.edu.cn/simple matplotlib
1.2 安装evo
git clone https://github.com/MichaelGrupp/evo.git
cd evo
pip install -i https://pypi.tuna.tsinghua.edu.cn/simple evo --upgrade --no-binary evo
2. evo使用
2.1 数据集转换格式
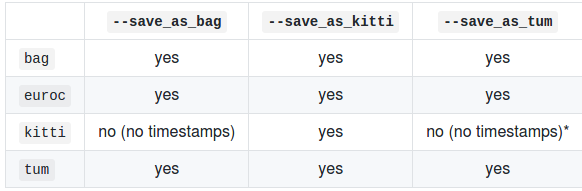
保存/导出为其他格式:euroc、tum、kitti数据集格式之间的互相转换.
# euroc数据集 -> tum数据集格式文件(data.tum)
evo_traj euroc data.csv --save_as_tum
# tum数据集 -> kitti数据集格式文件(*.kitti)
evo_traj tum traj_1.txt traj_2.txt traj_3.txt --save_as_kitti
# tum数据集 -> ROS bag文件格式(<时间戳>.bag)
evo_traj tum traj_1.txt traj_2.txt traj_3.txt --save_as_bag
相互转换图解:
2.2 evo命令格式
command bag bagfile-path reference-topic estimated-topic [options]
- command:指令(evo_traj、evo_ape、evo_rpe)
- bag:数据集名称(euroc、kitti、tum)
- bagfile-path:文件所在路径(参考和估计文件在同一文件夹下)
- reference-topic:真实值
- estimated-topic:估计值
- [options]: 其他参数选项(-a、-s、-as)
2.3 其他参数选项-[options]
- 自动对齐 --align 或者 -a
- 尺度校准 --correct_scale 或者 -s
- 自动对齐且尺度校准 --align --correct_scale 或者 -as
2.4 显示轨迹evo_traj
- 显示单轨迹
evo_traj euroc data.csv -p --plot_mode=xy
evo_traj tum data.tum -p --plot_mode=xy
evo_traj tum groundtruth.txt -p --plot_mode=xy
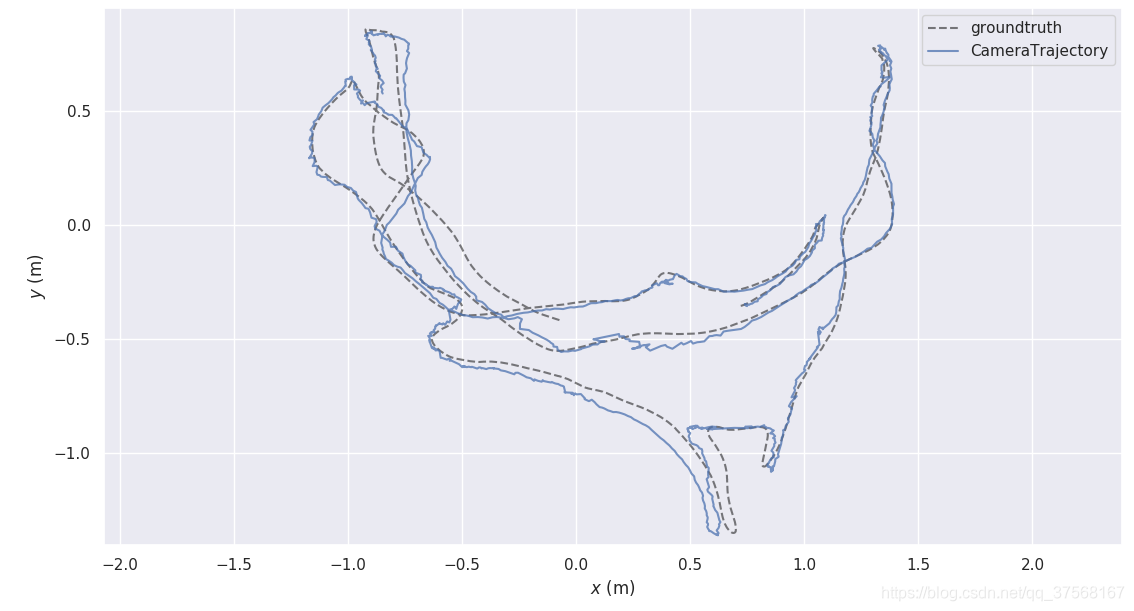
- 显示双轨迹(真值和估计值)
evo_traj tum CameraTrajectory.txt --ref=data.tum -p --plot_mode=xy -as
evo_traj euroc CameraTrajectory.txt --ref=data.csv -p --plot_mode=xy -as
等价于:
evo_traj tum CameraTrajectory.txt --ref=data.tum -p --plot_mode=xy --align --correct_scale
evo_traj euroc CameraTrajectory.txt --ref=data.csv -p --plot_mode=xy --align --correct_scale
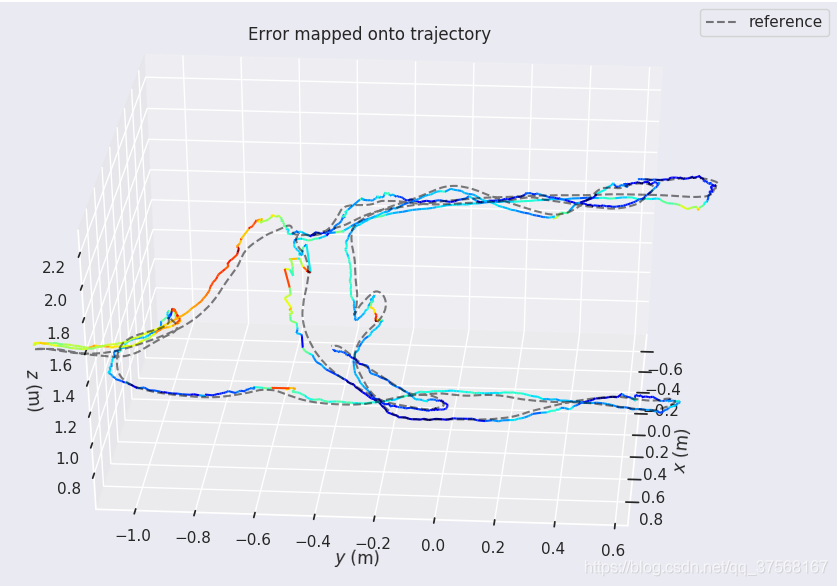
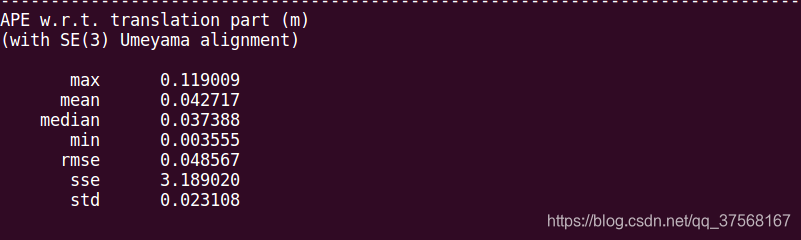
2.5 绝对位姿误差evo_ape
evo_ape tum data.tum CameraTrajectory.txt -va -p --plot_mode=xyz
evo_ape euroc data.csv CameraTrajectory.txt -va -p --plot_mode=xyz
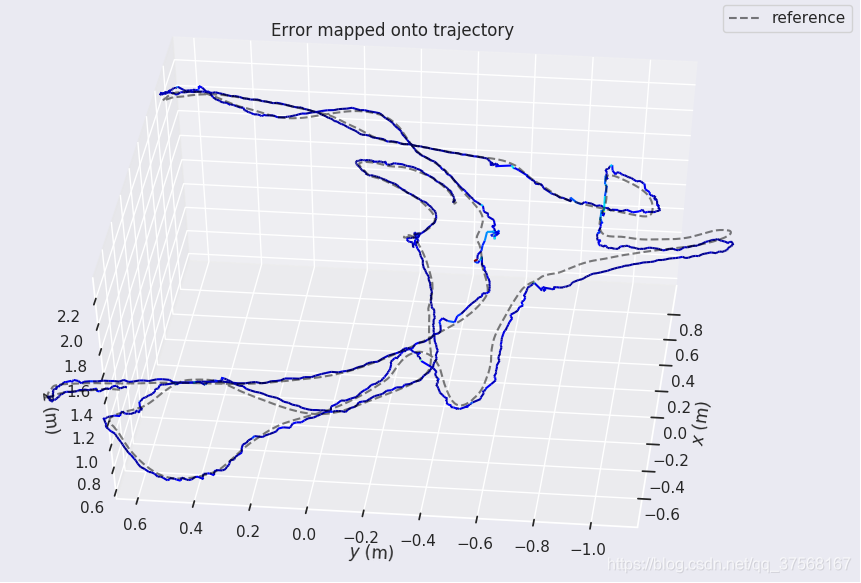
2.6 相对位姿误差evo_rpe
evo_rpe tum data.tum CameraTrajectory.txt -va -p --plot_mode=xyz
evo_rpe euroc data.tum CameraTrajectory.txt -va -p --plot_mode=xyz
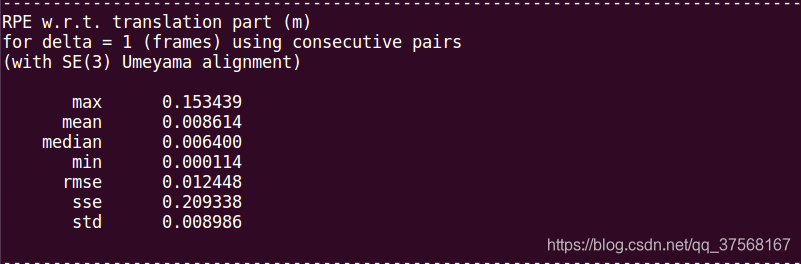 其中:
其中:
- max: 表示最大误差;
- mean:平均误差;
- median:误差中位数;
- min: 最小误差;
- rmse:均方根误差;
- sse: 和方差、误差平方和;
- std: 标准差
3. 后续计划
后续将进行深度卷积网络的学习,以及VIO的SLAM课程学习,主要研究方向还是深度学习(图像和点云方向).

















 9688
9688

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









