







 本文介绍了单片机中多任务并行处理的概念和技术,通过将任务分解为多个线程,实现资源的有效分配与利用。文章详细阐述了如何使用线程进行任务管理,包括线程的创建、调度和执行。
本文介绍了单片机中多任务并行处理的概念和技术,通过将任务分解为多个线程,实现资源的有效分配与利用。文章详细阐述了如何使用线程进行任务管理,包括线程的创建、调度和执行。
多任务多线程
多任务"并行处理"
首先我们来理解一下并行处理,初学者写程序通常是顺序执行,当我们逐渐想成为“专业”人士的时候顺序执行 的程序已经不能满足我们了,所以就需要多任务多线程系统,市面上标准的一些操作系统比如ucos,freeRTOS这些操作系统需要的学习周期长,范围广。在网上看到了一本书"单片机编程魔法师之高级裸编思想"在没学会ucos的阶段学习用这种思想过度感觉非常nice!
单片机是支持多任务同时并行地运行在一个系统中,在具体介绍之前先看一看单片机的硬件结构
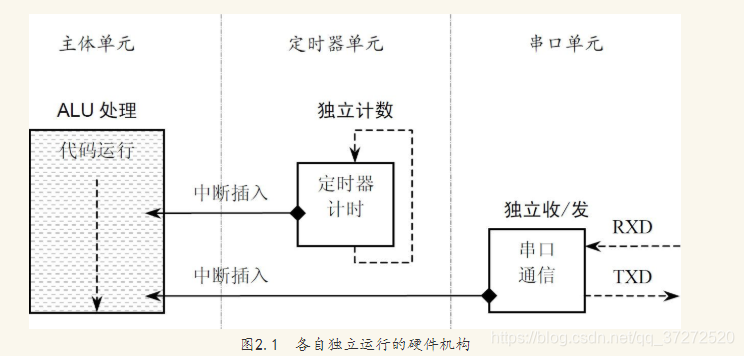
这个图中我们可以看出,单片机的运行是在ALU的主导下进行的;而定时器指是一个定时装置,它在定时计数期间是无需ALU干预的,完全独立运行;串口的通讯单元对数据的接收与发送也是完全独立完成的,并不需要ALU干预。很显然这三个任务是并行处理,切互不干涉,只有在定时器或串口产生中断时才会到代码中临时运行一段程序,已向单片机的主体运行过程交付一下结果,以便进行汇总处理。
微操作系统
简单一点来说就是一个while(1)但是while中我们采用多任务多线程的方式管理。首先我们要知道任务有生死,生死是一个过程所以具有寿命。
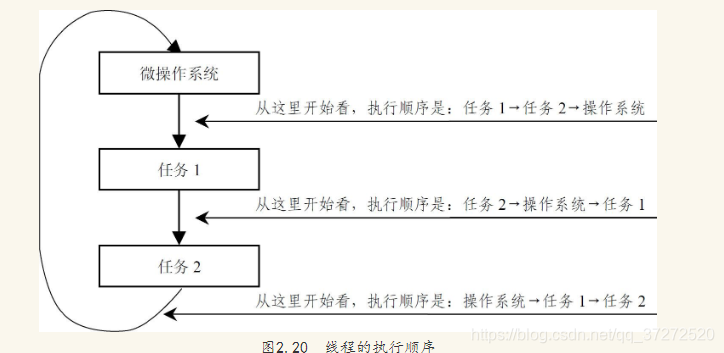
一个任务的线程:假设一个任务的执行代码有50步,通常编程只会一次执行完毕,但是我们现在需要想想,因为我们会嫌这个任务总占用着ALU的时间而影响其他任务的执行效果,所以就可以对任务进行划分,把它分为5份,每份10步,这样我们每次执行其中的一个程序片–每次正在运行的程序片我们称为线程。

这个图很完美的解释了线程的运行原理。
具体线程的实现:
typedef struct{
u8 isTask_Living;
u8 Thread_Process;
}myTask;
void Task(void)
{
if(Task.isTask_Living)
{
Task.isTask_Living = !myThread3(&Task3,&Task3.Thread_Process);
}
}
/*初始化任务变量*/
void InitTask4(myTask4 *Task)
{
Task->isTask_Living=1;
Task->Thread_Process=0;
}
/*功能:任务线程
**参数:myTask:Task任务类型
** :Process:unsigned char*类型,线程指针
**返回值:CHAR类型,线程结束,或未结束
*/
static int myThread(myTask *Task,unsigned char *Process)
{
int ret=0;
switch(*Process)
{
case 0:
//程序片1
break;
case 1:
//程序片2
break;
case 2:
//程序编3
break;
default:break;
}
(*Process)++;
if(*Process>3)
{
ret = -1;
*Process = 0;
}
return ret;
}
void TaskCommunication(void)
{
if(Task.isTask_Living)
{
Task.isTask_Living = !myThread(&Task4,&Task4.Thread_Process);
}
}
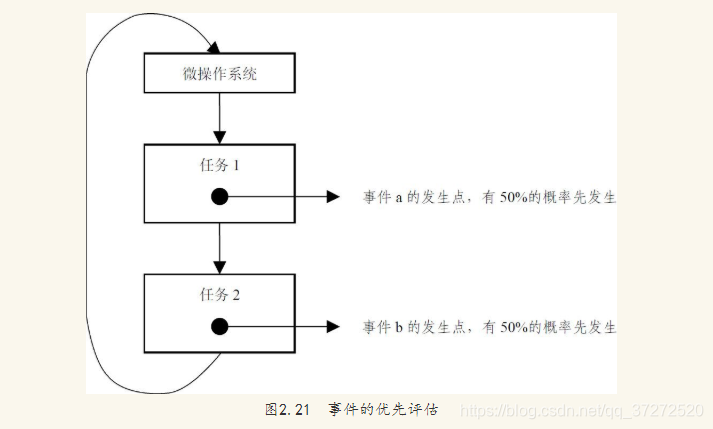
真正多任务处理的过程:

仔细理解图上的内容对写多任务程序的结构很有好处。
加油吧骚年们!


















 6330
6330

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











