






 本文详细介绍了如何结合STM32CubMx和RT-ThreadStudio创建并配置嵌入式系统工程,实现多线程运行。首先在RT-ThreadStudio中新建工程,然后使用STM32CubMx配置芯片时钟和GPIO,开启多线程并配置LED灯。接着,在main.c文件中添加线程函数,创建并启动两个线程分别控制不同的LED灯交替闪烁。最后,通过终端命令启动线程任务。
本文详细介绍了如何结合STM32CubMx和RT-ThreadStudio创建并配置嵌入式系统工程,实现多线程运行。首先在RT-ThreadStudio中新建工程,然后使用STM32CubMx配置芯片时钟和GPIO,开启多线程并配置LED灯。接着,在main.c文件中添加线程函数,创建并启动两个线程分别控制不同的LED灯交替闪烁。最后,通过终端命令启动线程任务。
本文主要介绍如何通过STM32CubMx+RT-Thread Studio实现嵌入式多线程运行的步骤。
新建工程
RT-Thread Studio工程
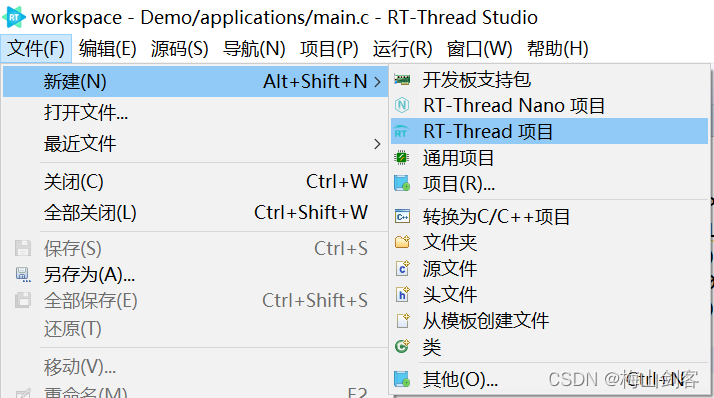
打开RT-Thread Studio软件,新建工程。选择RT-Thread项目
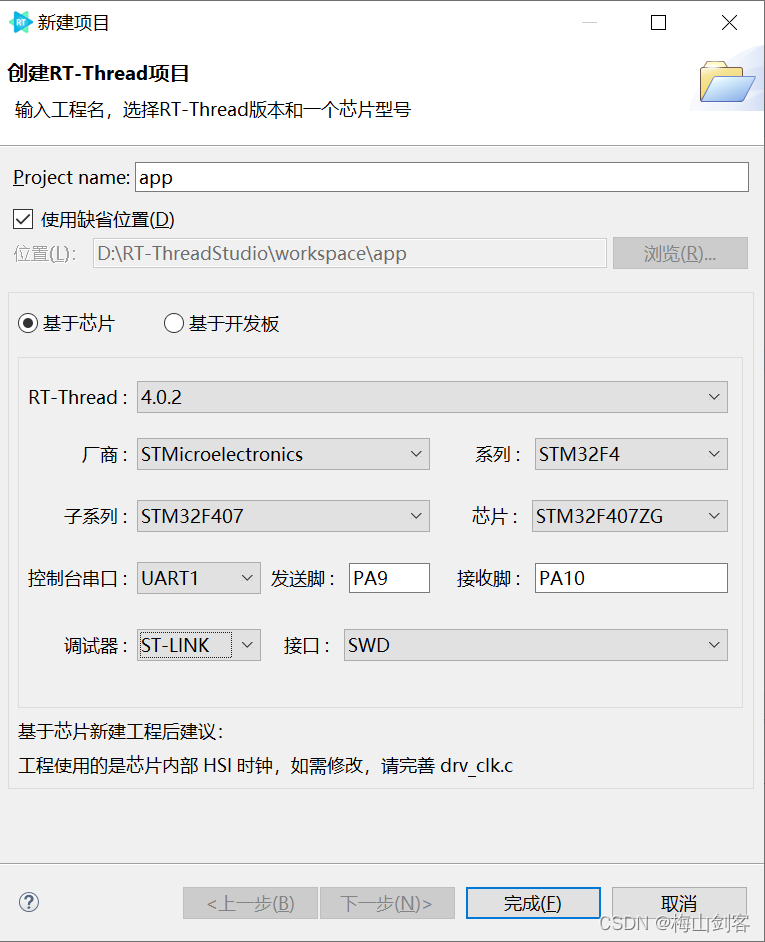
 从芯片选型出发,配置芯片信息,这里我的板子是原子探索者F407ZGT6,根据自己的芯片型号配置具体信息。
从芯片选型出发,配置芯片信息,这里我的板子是原子探索者F407ZGT6,根据自己的芯片型号配置具体信息。
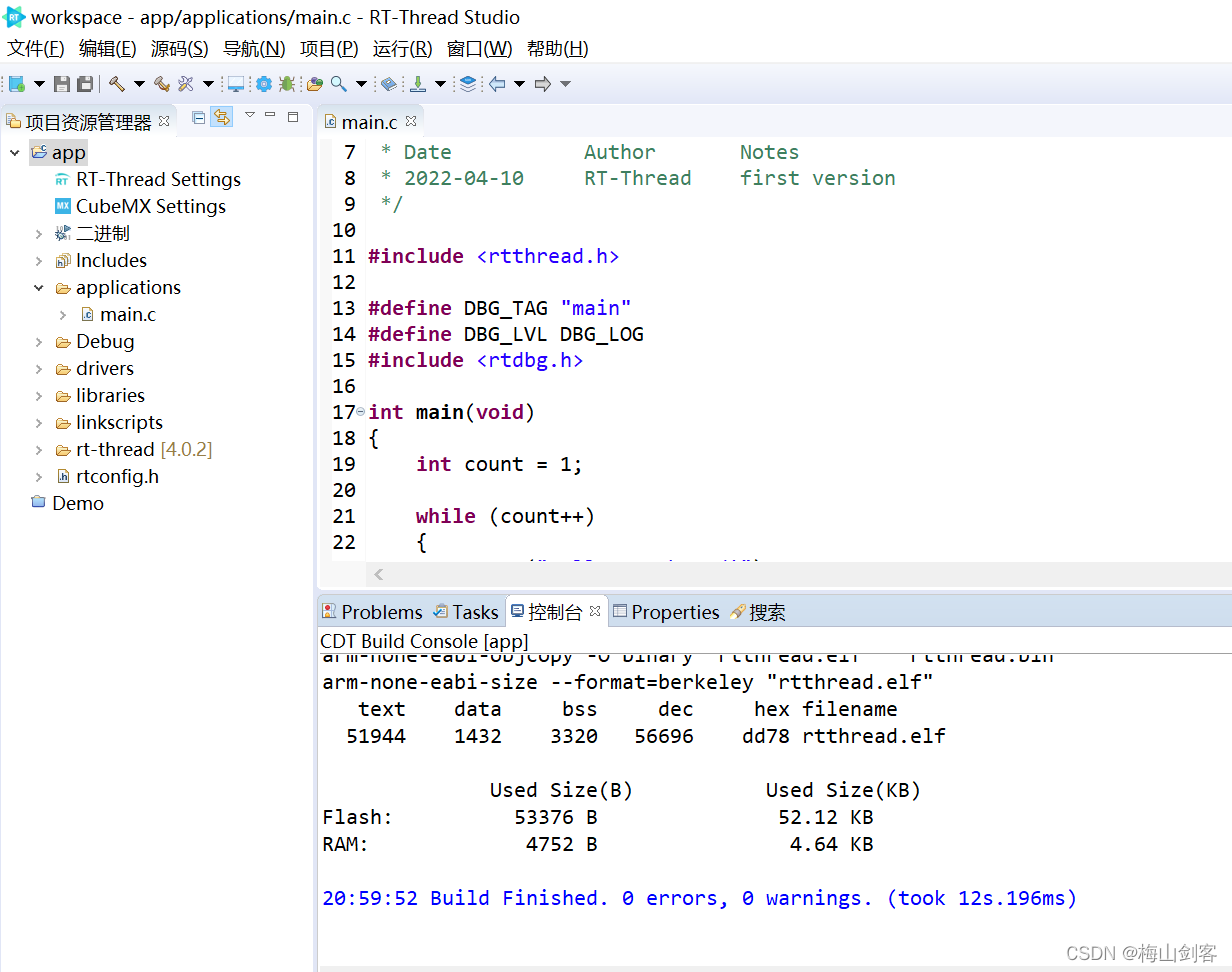
至此,RT-Thread Studio 软件配置任务完成,如下图所示。
STM32CubMx工程
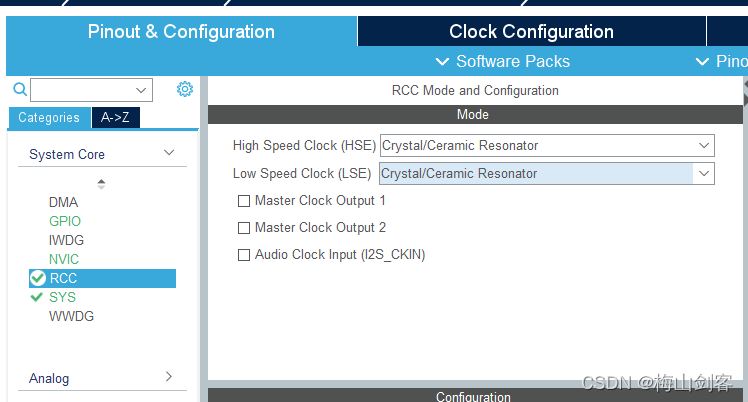
在新建完成的RT-Thread Studio打开STM32CubMx软件,这里要开启多线程 实现不同类型的线程,以板子自带的PF9和PF10 LED灯为例。
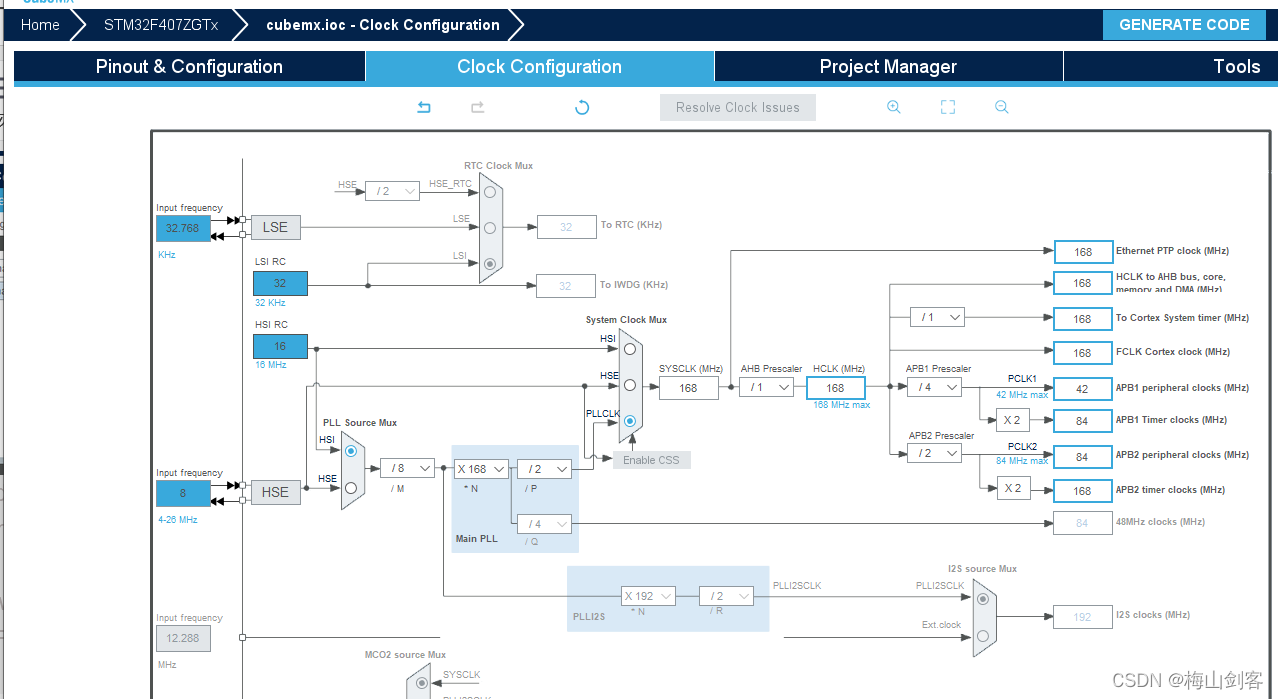
首先:开启时钟
 配置时钟树,主频赫兹为168Mhz。
配置时钟树,主频赫兹为168Mhz。
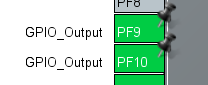
打开PF9和PF10,并且设置为输出。
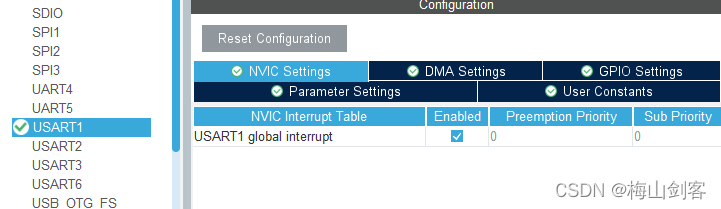
需要使用终端,因此要打开终端。开启串口1。
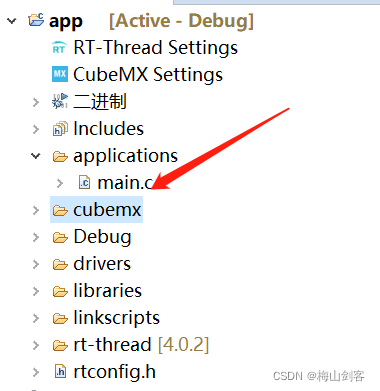
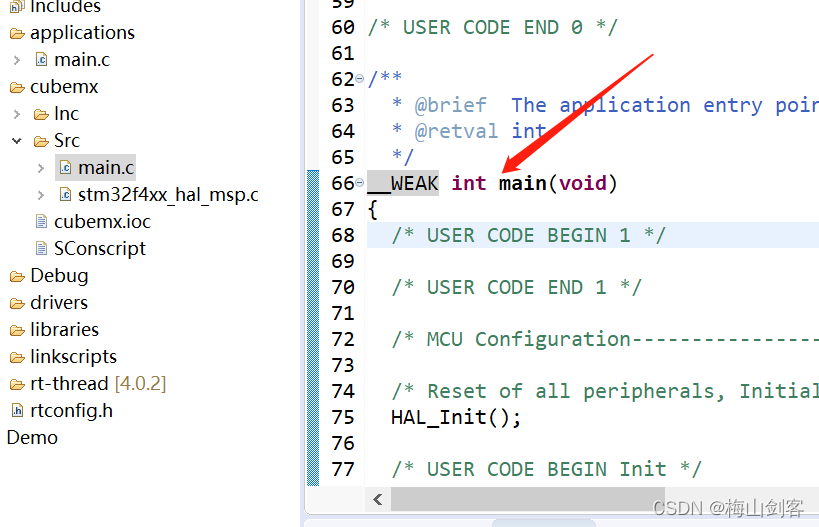
至此,cubmx工程配置完成,可以看到文件目录上多了一个cubmx的文件目录。
接下来,在cubmx中,删除生成的__WEAK int main(void)函数。
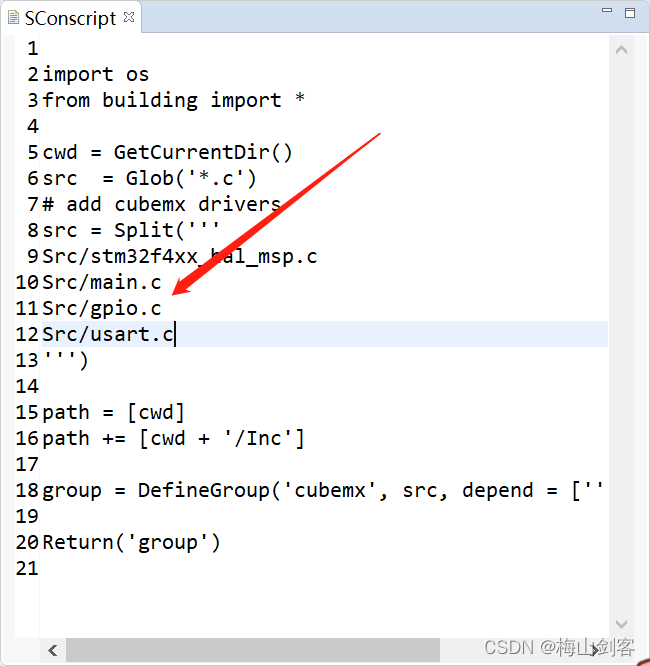
 紧接着需要在cubmx生成的
紧接着需要在cubmx生成的SConscript文件中添加生成的如下文件
添加多线程函数
在完成上述一系列配置之后,在application中的main.c中,直接替换如下函数,实现多线程运行。
#include <rtthread.h>
#define DBG_TAG "main"
#define DBG_LVL DBG_LOG
#include <rtdbg.h>
#include "main.h"
#include "gpio.h"
#include "usart.h"
#include "rtthread.h"
#include "board.h"
#define LED0 GET_PIN(F,9)
#define LED1 GET_PIN(F,10)
#define THREAD_PRIORITY 25
#define THREAD_STACK_SIZE 512
#define THREAD_TIMESLICE 5
/* 指向线程控制块的指针 */
rt_thread_t tid1 = RT_NULL;
rt_thread_t tid2 = RT_NULL;
void led0_entry(void* p)
{
rt_kprintf("LED0 Runing\r\n");
while(1)
{
HAL_GPIO_WritePin(GPIOF, GPIO_PIN_9,GPIO_PIN_SET);
rt_pin_write(LED0, 1);
rt_thread_delay(500);
rt_pin_write(LED0, 0);
rt_thread_delay(500);
}
}
void led1_entry(void* p)
{
rt_kprintf("LED1 Runing\r\n");
while(1)
{
rt_pin_write(LED1, 1);
rt_thread_delay(500);
rt_pin_write(LED1, 0);
rt_thread_delay(500);
}
}
void led0_start(void)
{
/* 创建线程1 */
tid1 = rt_thread_create("t11", /*线程名称*/
led0_entry, /*线程入口函数*/
RT_NULL, /*线程入口函数参数*/
THREAD_STACK_SIZE, /*线程大小*/
THREAD_PRIORITY, /*线程优先级*/
THREAD_TIMESLICE /*线程时间片*/
);
if(tid1 != RT_NULL)//分配成功,加入到就绪队列中
rt_thread_startup(tid1);
}
void led1_start(void)
{
/* 创建线程1 */
tid2 = rt_thread_create("t22", /*线程名称*/
led1_entry, /*线程入口函数*/
RT_NULL, /*线程入口函数参数*/
THREAD_STACK_SIZE, /*线程大小*/
THREAD_PRIORITY, /*线程优先级*/
THREAD_TIMESLICE /*线程时间片*/
);
if(tid2 != RT_NULL)//分配成功,加入到就绪队列中
rt_thread_startup(tid2);
}
MSH_CMD_EXPORT(led0_start, led0_task);//添加任务至终端
MSH_CMD_EXPORT(led1_start, led1_task);
static void hook_of_schedule(struct rt_thread *from,struct rt_thread *to)
{
rt_kprintf("from %s ---> to %s \r\n",from->name,to->name);
rt_kprintf("\r\n");
}
void thread_init_function(void)
{
/*设置调度器的钩子函数*/
rt_scheduler_sethook(hook_of_schedule);
/*线程1启动*/
led0_start();
/*线程2启动*/
led1_start();
}
int main(void)
{
MX_GPIO_Init();
MX_USART1_UART_Init();
LOG_D("Init Ok!");
thread_init_function();
int count = 1;
while (count++)
{
// rt_kprintf("count = %d\r\n",count);
rt_thread_mdelay(1000);
}
return RT_EOK;
}
下载,进入终端,输入命令led0_start,led1start启动线程,或者将线程放到main函数中,在main中直接启动函数。


















 1517
1517

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









