






对机械臂的工作的空间
参考:
John J. Craig《机器人学导论》
《Springer Handbook of Robotics》
工作空间是操作臂末端执行器能够到达的区域,若要求逆运动学解存在,则被指定的目标点必须在工作空间内。在这里说说对机械臂两种工作空间定义的理解。
可达工作空间
至少从一个方向可以到达的空间,这个较容易理解,就是可以放置末端执行器的点的总位置。
灵巧工作空间
机器人末端执行器能够从各个方向到达的空间区域,在这个点上,可以以任意的姿态摆放机械臂。
这样灵巧的工作空间只在某些理想的几何体上存在,具有关节限制的实际工业机器手几乎不拥有灵巧工作空间。
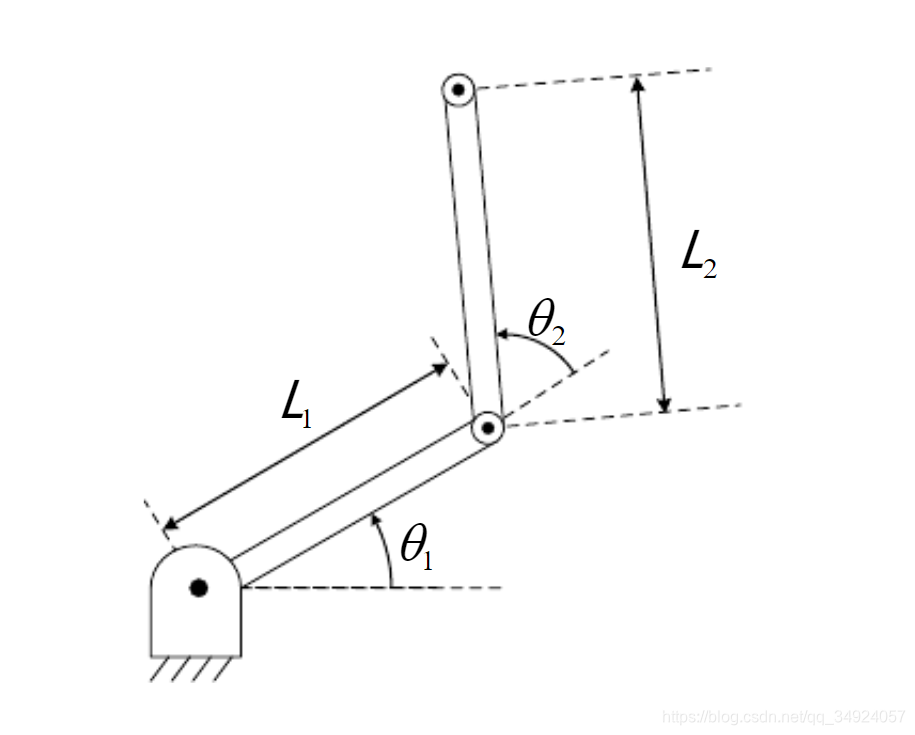
如图,假设两连杆的所有关节能旋转360°(二维),这种情况在实际机构中很少见。
如果L1 = L2, 那么灵巧工作空间只有原点处单独的一个点,可达工作空间是半径为L1+L2的圆;
如果L1≠L2,就不存在灵巧工作空间,可达工作空间是外径为L1+L2,内径为 |L1-L2| 的圆环。
不难看出来灵巧工作空间是可达工作空间的子集

















 1918
1918

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









