







 这篇博客深入探讨了计算机图形学中的几何概念,包括隐式几何、显示几何和曲面细分技术。讲解了从隐式几何的布尔运算和距离函数,到显示几何中的参数映射、点云、多边形面和贝塞尔曲线的原理。同时,介绍了曲面细分方法,如Loop细分和Catmull-Clark细分。最后,提到了曲面简化技术——边坍缩法,通过二次误差度量实现几何体的优化。
这篇博客深入探讨了计算机图形学中的几何概念,包括隐式几何、显示几何和曲面细分技术。讲解了从隐式几何的布尔运算和距离函数,到显示几何中的参数映射、点云、多边形面和贝塞尔曲线的原理。同时,介绍了曲面细分方法,如Loop细分和Catmull-Clark细分。最后,提到了曲面简化技术——边坍缩法,通过二次误差度量实现几何体的优化。
几何
教程:B站闰老师的计算机图形学入门
隐式几何
并不会直接定义xyz的坐标,而是阐述xyz之间的关系
函数式
x 2 + y 2 + z 2 = 1 x^2+y^2+z^2=1 x2+y2+z2=1
上方的函数就表示了一个单位球
特点:
- 不直观
- 很难描述复杂的形状
- 容易判断一个点是否在面上
布尔运算
使用简单的几何体,通过进行交集、差集、并集形成复杂的几何体
距离函数
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-mJzK0vAw-1618036670005)(C:\Users\10375\AppData\Roaming\Typora\typora-user-images\image-20210409200119947.png)]](https://i-blog.csdnimg.cn/blog_migrate/1ba9c25764b2f6852ccdd9a6125de3c1.png#pic_center)
如上图,直接混合AB只会得到1/3的灰色
而使用距离函数之后,AB分别根据右边界生成两个距离函数,越右边越大
将两者混合之后,两个距离函数相加为0的地方为中线,为想要的效果

这样子就能融合一些形状
距离函数另一种表述:水平集
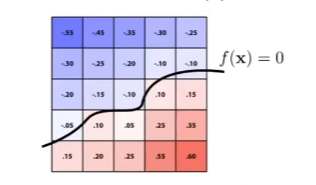
函数本身通过图表来表示
可以通过双线性插值获得f(x)为某一数的地方,就像等高线一样
分形:特殊的描述法
物体的一部分和自己的整体相似
因为变化十分剧烈所以很难采样
显示几何
参数映射
定义二维的变量uv,有如下函数
f ( u , v ) = f ( x , y , z ) f(u,v)=f(x,y,z) f(u,v)=f(x,y,z)
使用uv两个参数来映射空间中实际的点的位置,xyz都是根据uv直接决定的
点云
将点连成线、面,当点足够多时,可以看作一个面
一般在3D扫描中存储物体的形状
多边形面
一般由三角形、四边形的面组成
obj文件存储:
//每个顶点,按序号排
v x y z
//每个法线
vn x y z
//纹理坐标
vt x y z
//定义点之间的连接关系,比如 3/4/5表示使用第三个顶点,第4个纹理坐标,第5个法线
//定义三个连接成三角形
f v1/vt1/vn1 v2/vt2/vn2 v3/vt3/vn3
贝塞尔曲线
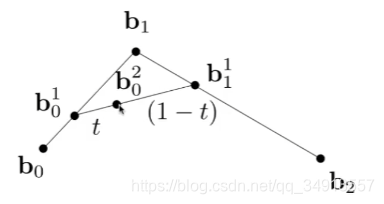
以三个点为例,设 t ∈ ( 0 , 1 ) t\in(0,1) t∈(0,1)
找到 b 0 1 b^1_0 b01,使 b 0 b 0 1 = t b 0 b 1 , b 0 1 b 1 = ( 1 − t ) b 0 b 1 b_0b_0^1=tb_0b_1,b_0^1b_1=(1-t)b_0b_1 b0b01=tb0
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 8207
8207

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









