




 本文深入探讨了图灵机的定义、与DFA的区别,并介绍了图灵机的格局表示、转换规则以及图灵机与确定性有穷自动机(DFA)的特性对比。进一步讨论了图灵可识别的、递归可枚举的和可判定的语言,以及它们之间的关系,包括通用图灵机和计算复杂性理论。最后,文章提到了计算历史、计算层次和一些重要的计算问题,如POST问题和EQTM问题。
本文深入探讨了图灵机的定义、与DFA的区别,并介绍了图灵机的格局表示、转换规则以及图灵机与确定性有穷自动机(DFA)的特性对比。进一步讨论了图灵可识别的、递归可枚举的和可判定的语言,以及它们之间的关系,包括通用图灵机和计算复杂性理论。最后,文章提到了计算历史、计算层次和一些重要的计算问题,如POST问题和EQTM问题。
复习使用
定义
图灵机形式定义:
TMm=(Q,Σ,Γ,δ,q0,qaccept,qreject)TM m=(Q,\Sigma,\Gamma,\delta,q_{0},q_{accept},q_{reject})TMm=(Q,Σ,Γ,δ,q0,qaccept,qreject)
(1)QQQ是状态集
(2)Σ\SigmaΣ编入定义表
(3)Γ\GammaΓ带定义表,ε⊆Γ,⊔⊆Γ\varepsilon \subseteq \Gamma,\sqcup \subseteq\Gammaε⊆Γ,⊔⊆Γ
(4)δ:Q×Γ→Q×Γ×{
L,R}\delta:Q\times\Gamma\to Q \times \Gamma \times\{L,R\}δ:Q×Γ→Q×Γ×{
L,R}
(5)q0q_0q0为初态
(6)qacceptq_{accept}qaccept为接受状态
(7)qrejectq_{reject}qreject为拒绝状态
格局
我们用格局表示图灵机的当前状态,当前带内容和读写头的当前位置的信息。
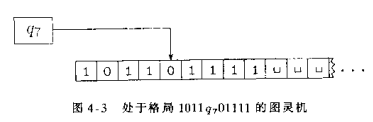
上图就是一种格局,我们表示为1011q7011111011q_7011111011q701111,意思为:当前带内容是101101111,当前状态为q7q_7q7,读写头当前在第二个0上。格局中状态后的第一个字符为读写头指向的位置。
如果图灵机能合法的从格局C1C_1C1一步进入到C2C_2C2,则称格局C1C_1C1产生格局C2C_2C2,可表示为C1→MC2C_1 \underset{M}{\rightarrow} C_2C1M→C2,这个概念的形式定义如下:
设a,b和c是Γ\GammaΓ中的符号,u和v是Γ∗\Gamma^{*}Γ∗中的字符串,qiq_iqi和qjq_jqj是状态,则uaqibvuaq_ibvuaqibv和uqjacvuq_jacvuqjacv是两个格局。如果转移函数满足δ(qi,b)=(qj,c,L)\delta(q_i,b)=(q_j,c,L)δ(qi,b)=(qj,c,L),则说:
uaqibvuaq_ibvuaqibv产生uqjacvuq_jacvuqjacv
这说明了图灵机左移的情况,下面是右移的情况。如果δ(qi,b)=(qj,c,R)\delta(q_i,b)=(q_j,c,R)δ(qi,b)=(qj,c,R),则说:
uaqibvuaq_ibvuaqibv产生uacqjvuacq_jvuacqjv
图灵机与DFA的区别
DFA:确定性有穷自动机
1.带上可读写
2.读写头可左右移动
3.带子无限长
4.接受和拒绝状态都会停机
其他相关定义
如果L(M)={
w∈Σ∗∣∃u,v∈Γ∗,q0w→M∗uqacceptv}L(M)=\{w\in \Sigma^* |\exists u,v \in \Gamma^*,q_{0}w\xrightarrow[M]{*}uq_{accept}v\}L(M)={
w∈Σ∗∣∃u,v∈Γ∗,q0w∗Muqacceptv}称www是M接受(识别)的语言。
图灵可识别的/递归可枚举的(r.e.r.e.r.e.),定义为:
L⊆Σ∗,r.e.⇔∃TMM(L=L(M))⇔∃TMM(∀w∈L,∃u,v∈Γ∗,(q0w∣→M∗uqacceptv))L\subseteq \Sigma^*,r.e.\Leftrightarrow \exists TM M(L=L(M))\Leftrightarrow\exists TM M\left ( \forall w \in L,\exists u,v \in \Gamma^*, \left ( q_0w |\xrightarrow[M]{*}uq_{accept}v\right )\right )L⊆Σ∗,r.e.⇔∃TMM(L=L(M))⇔∃TMM(∀w∈L,∃u,v∈Γ∗,(q0w∣∗Muqacceptv))
图灵可判定的/图灵可递归的(recusive),定义为:
L⊆Σ∗⇔∃TMM(∀w∈L,∃u,v∈Γ∗,(q0w∣→M∗uqacceptv)∧∀wˉ∉L,∃uˉ,vˉ∈Γ∗,(q0wˉ∣→M∗uˉqrejectvˉ))L\subseteq\Sigma^* \Leftrightarrow \exists TM M\left ( \forall w \in L,\exists u,v \in \Gamma^*, \left ( q_0w| \xrightarrow[M]{*}uq_{accept}v\right )\wedge\forall \bar{w} \notin L,\exists\bar{u},\bar{v} \in \Gamma^*, \left ( q_0\bar{w}| \xrightarrow[M]{*}\bar{u}q_{reject}\bar{v}\right ) \right )L⊆Σ∗⇔∃TMM(∀w∈L,∃u,v∈Γ∗,(q0w∣∗Muqacceptv)∧∀wˉ∈/L,∃uˉ,vˉ∈Γ∗,(q0wˉ∣∗Muˉqrejectvˉ))
可递归的与可枚举的区别
1)可枚举的
在输入上运行TM时,可能达到停机状态,也可能达到循环即不停机状态
如果在,可达到这个状态,如果不在,没有回答
2)可判定的
对于任何输入,TM总能决定接受或者拒绝
如果在,可达到接受状态,如果不在,达到拒绝状态
可递归的与可枚举的联系
1)可判定的都是可识别的,可识别的不一定都是可判定的
2)设L⊆Σ∗,Lˉ=Σ∗−L,L is recusive,  ⟺  L和Lˉ都是r.e.L\subseteq\Sigma^*,\bar{L}=\Sigma^*-L,L \, is \,recusive,\iff L和\bar{L}都是r.e.L⊆Σ∗,Lˉ=Σ∗−L,Lisrecusive,⟺L和Lˉ都是r.e.
不是可识别的
ATM‾、EQTM、EQTM‾、ETM\overline{A_{TM}}、EQ_{TM}、\overline{EQ_{TM}}、E_{TM}ATM、EQTM、EQTM、ETM
不是可递归的
ATM、ATM‾、ETM、NETM、HALTTM、PCP、REGULARTMA_{TM}、\overline{A_{TM}}、E_{TM}、NE_{TM}、HALT_{TM}、PCP、REGULAR_{TM}ATM、ATM、ETM、NETM、HALTTM、PCP、REGULARTM
通用图灵机:
ATM={
<M,w>∣TM M接受w}A_{TM}=\{<M,w>|TM \, M接受w\}ATM={
<M,w>∣TMM接受w},ATM is  r.e.(图灵可识别的),ATM是不可判定的A_{TM} \,is\,\,r.e.(图灵可识别的),A_{TM}是不可判定的ATMisr.e.(图灵可识别的),ATM是不可判定的
构造TM U识别ATMTM \,U识别A_{TM}TMU识别ATM
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1646
1646

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









