







 本文介绍了在Ubuntu 16.04环境下,如何使用Modbus RTU协议配置Robotiq 2f-140夹爪,包括设备配置、ROS工作空间创建、驱动安装、串口配置、夹爪控制及通过RVIZ显示模型的操作步骤。
本文介绍了在Ubuntu 16.04环境下,如何使用Modbus RTU协议配置Robotiq 2f-140夹爪,包括设备配置、ROS工作空间创建、驱动安装、串口配置、夹爪控制及通过RVIZ显示模型的操作步骤。
ubuntu16.04下使用Modbus RTU协议控制Robotiq
一、设备配置
操作系统:Ubuntu 16.04
夹爪型号:Robotiq 2f-140
转换线:RS485转USB
通过RS485转USB建立两指夹爪和上位机通讯,此时Robotiq指示灯显示红色。
二、创建工作空间
在创建工作空间是注意在不同的文件夹下执行终端命令
1.创建robotiq_ws工作空间:
mkdir -p robotiq_ws/src
-----执行命令后,home下会新创建robotiq_ws文件夹,robotiq_ws文件夹下出现src文件夹。
2.这时返回robotiq_ws文件夹下,在robotiq_ws文件夹下编译工作空间:
cd ~/robotiq_ws/
catkin_make
-----此时会出现三个文件夹

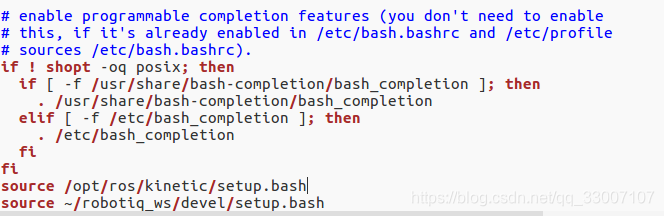
3.配置环境变量:
gedit ~/.bashrc
在文末添加
source ~/robotiq_ws/devel/setup.bash
4.下载robotiq功能包
cd ~/robotiq_w 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 3829
3829

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









