



 本文详细介绍了RSSI与惯性导航技术如何结合进行室内定位。首先,阐述了RSSI定位的基本原理,包括信号衰减模型和指纹定位方法。接着,讨论了惯性导航在辅助RSSI定位中的作用,通过手机传感器数据来计算行人位移。最后,提到了信号采集、校准、步态更新和航向校准等关键步骤。
本文详细介绍了RSSI与惯性导航技术如何结合进行室内定位。首先,阐述了RSSI定位的基本原理,包括信号衰减模型和指纹定位方法。接着,讨论了惯性导航在辅助RSSI定位中的作用,通过手机传感器数据来计算行人位移。最后,提到了信号采集、校准、步态更新和航向校准等关键步骤。
rssi与惯导结合的室内定位
介绍之前工作所用的室内定位技术。分为以下几步:
- 定位技术简介
- RSSI定位
- 惯性导航
本文档,您还可以前往以下网址下载:
rssi与惯导结合的室内定位
定位技术简介
现有的导航可分为室外、室内两类。
室外主要使用卫星导航定位
- GPS
- GLONASS
- GALILEO
- 北斗
北斗卫星导航定位系统是我国16项科技重大专项之一,2012年12月27日,北斗卫星导航业务正式开始对亚太地区提供服务。在室外定位领域,GPS系统比北斗系统研究开发早二十多年,在高精度专业测量技术上GPS定位已经做到以分米、厘米计的亚米级,北斗系统也能够精确到2到5厘米。
室内定位技术:相较于 GPS 的大范围的空旷的定位,室内定位可以深入到地下,GPS 达不到的地方。目前已有多种室内定位技术解 决方案。常见无线定位技术对比图1所示:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-9NJwaDBJ-1605689417997)(http://a.36krcnd.com/photo/75f34d5b0dca1508091f53d45af6a274.png)]
一般采用蓝牙技术的定位系统通过两种测量算法,分别为:利用传播时间的测量方法与接收信号强度定位法(RSSI)。
RSSI定位
接收信号强度定位法又有两种常用方法:建立信号衰减模型;指纹定位。
建立信号衰减模型的方法是通过信号强度和已知信号衰弱模型来估计参考点(beacon点或称信标点)与待测点(手机)的距离,根据多个参考点距离待测点的距离值画出圆,多个圆的重叠部分就是待测目标的位置。它的优点是布局和维护成本相对低。
第二种是基于接收信号强度的指纹定位。该技术是将测量到的接收信号强度与前期测量的各个参考点的信号强度特性进行比较,选取匹配最好的参考点位置来作为测量目标的位置。该技术的优势是定位精度高,缺点:布局和维护的成本较高。
1. rssi信号衰减模型
在自由空间中,理论上可以用有关公式表示出无线信号强度与距离的关系。但是实际中,由于影响无线信号强度的因素过多(例如,常见的固定因素有:人流、金属板、墙壁),所以大部分是利用采集的RSSI值进行建模得到的经验模型。常用有两种:
-
衰减因子模型
\begin{equation}
PL(d){[dB]}=PL(d){dB}+10n_{SF}log_{10}(\frac{d}{d_0})+FAF_{dB}
\end{equation}
其中, n S F n_{SF} nSF表示相同楼层的测试指数值; F A F FAF FAF表示楼层衰减因子(常见的固定); -
对数路径距离损耗模型
\begin{equation}
P(d)[dB]=P(d_0)[dB]-10_nlog_{10}(\frac{d}{d_0})+X_{\sigma}
\end{equation}
其中, n n n为无线信号在传播过程中的能耗衰减指数,与室内环境的建筑材料、建筑风格不同有差异,一般是拟合获得,范围[2,4]; P d 0 P_{d_0} Pd0为单位距离的参考损耗; X σ X_{\sigma} Xσ为正态随机变量; d 0 d_0 d0为参考距离; d d d为待测节点与已知节点的直线距离。
实测中令 d 0 = 1 d_0=1 d0=1,则公式如下
\begin{equation}
\color{#0F0}{P_{i,j}=P_0-10nlog_{10}d_{i,j}}
\label{eq:eq3}
\end{equation}
通过公式\eqref{eq:eq3},计算出待测节点与已知节点的距离,然后通过定位算法,根据已经算出的距离计算待测节点的坐标,从而达到定位的目的。
2. rssi定位1
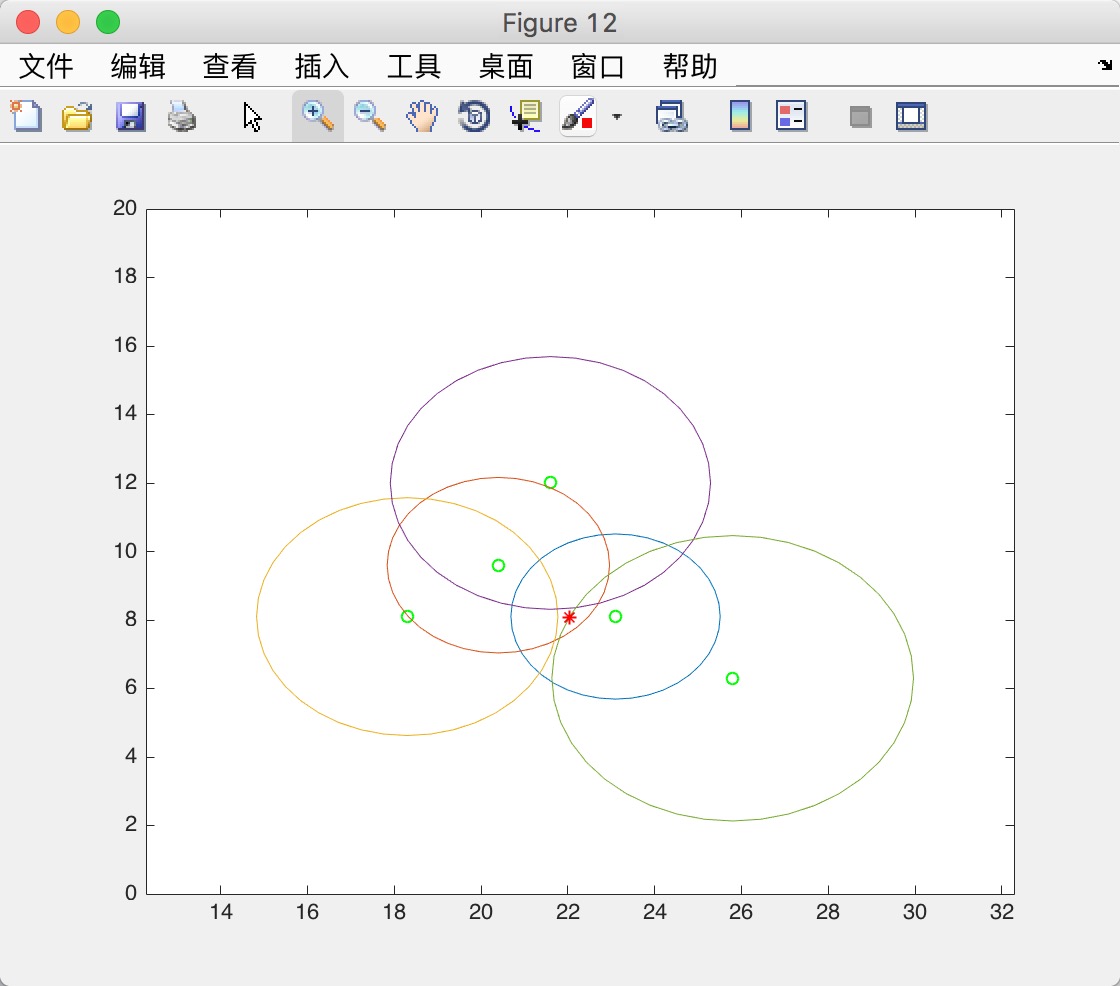
如上图所示,问题变成了已知五个已知节点的坐标
(
x
1
,
y
1
)
.
.
.
(
x
5
,
y
5
)
(x_1,y_1)...(x_5,y_5)
(x1,y1)...(x5,y5)及待测节点到五个已知节点的距离
d
1
.
.
.
d
5
d_1...d_5
d1...d5,求待测节点的坐标
(
x
,
y
)
(x,y)
(x,y)?根据平面距离公式有:
(
x
1
−
x
)
2
+
(
y
1
−
y
)
2
=
d
1
2
⋮
(
x
5
−
x
)
2
+
(
y
5
−
y
)
2
=
d
5
2
\begin{matrix} (x_1-x)^2+(y_1-y)^2=d_1^2\\ \vdots\\ (x_5-x)^2+(y_5-y)^2=d_5^2\\ \end{matrix}
(x1−x)2+(y1−y)2=d12⋮(x5−x)2+(y5−y)2=d52
解方程组:可用最小二乘或者最大似然函数法,详见文献2。
惯性导航3
使用rssi技术进行室内定位,因为受环境影响,既是是静止状态,定位点也会产生跳动,那么是否能够检测手机当前状态(静止?运动?),对rssi定位进行辅助。所以在此处考虑惯性导航,目前主要考虑的是行人的惯性导航(简称惯导)。
惯导是依据手机的传感器数据,判断行人的运行速度和行走方向,从而计算行人相对于起点的位移,而起点的绝对位置是需要通过其他途径得到(目前是rssi)。
惯性导航的流程图
1.信号采集
信号采集:采集手机姿态角、磁信号、加速度信号
姿态角:手机坐标系和东北天坐标系的区别。手机坐标系三轴分别偏离东北天三轴的角度。用于求坐标转换矩阵,将基于手机坐标系采集的数据转为基于东北天坐标系。
磁信号:数字罗盘采集到的地磁信号在手机坐标系三轴的分量,受周围环境磁信号的影响较大,受周围固定磁场的影响称为硬铁效应临时磁场的影响称为软铁效应,可通过手机绕8字旋转的方式对所受到的硬铁效应进行校准。见图;
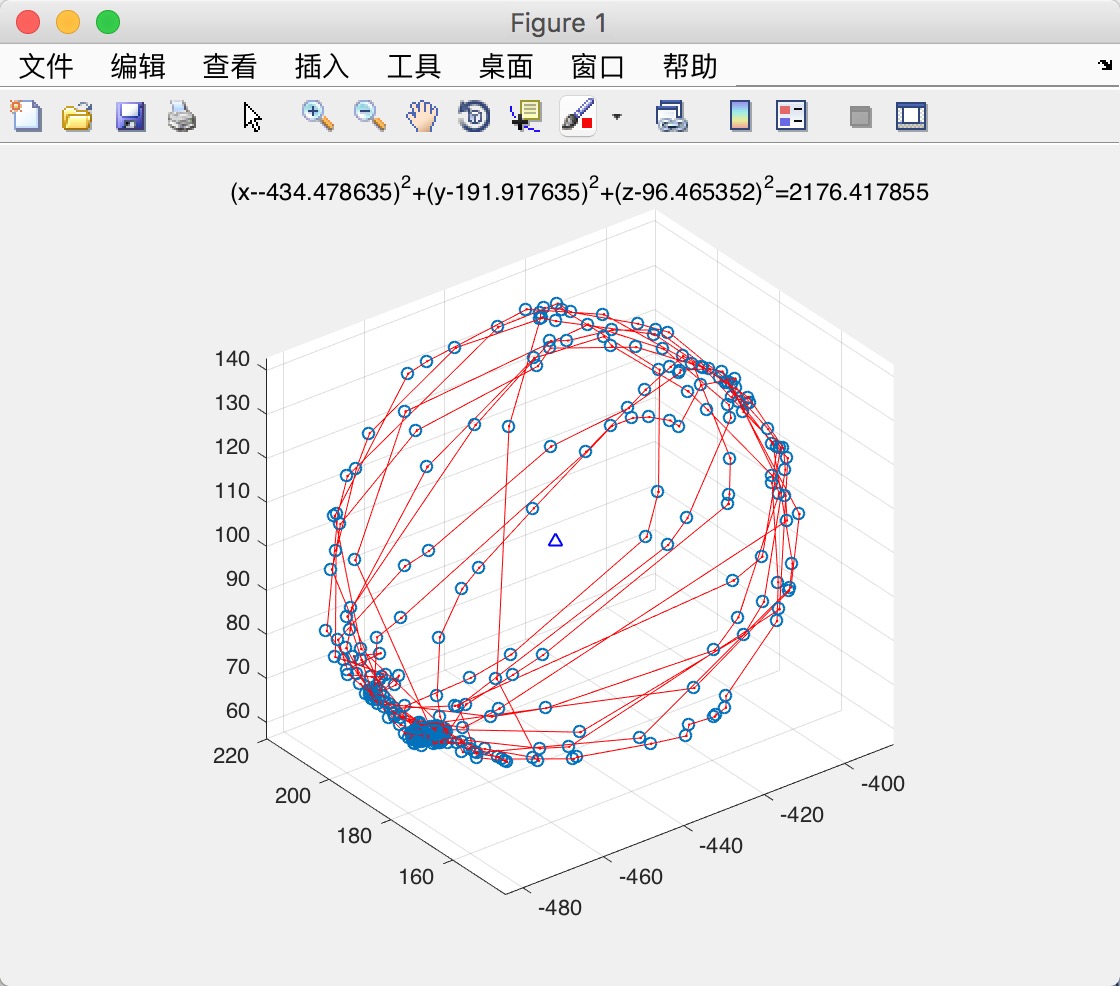
###2.校准环节
8字旋转手机,统计磁信号,至检测到手机静止为止,计算当地的重力加速度及磁信号硬铁校准系数
###3.步态更新
利用加速度更新步态。起步阶段向上的加速度逐渐增,直至最大波峰位置,后加速度逐渐减小至脚抬到最高点时的向上加速度变为0,接着脚落下,向上加速度变为负值,至负最大值,即波谷位置再逐渐回归到0加速度,此时脚落到地上,一步完成。实际过程分为8种步态S0_S84。根据当前线加速度的模值更新当前步态。
###4.判断一步是否完成
当步态从S0变到S8时,认为完成一步。
###5.步数增加、更新步长航向
上一步的步态不断更新,当检测到最后一个步态时,判断完成一步,并统计一步当中的线加速度,对其两次积分得到一步中的位移(包括模值和航向,此航向称为线加速度双积分所得航向,指行人前进航向)。同时,统计一步中的磁盘航向角,求均值得航向(此航向称为磁罗盘航向,指手机前进航向)。并使用加速度航向对磁罗盘航向进行校准(缘由:磁罗盘航向存在漂移,而加速度双积分航向由于是对离散采样点近似积分,误差较大,尤其是采样频率较低时。)。
补充:步长确定方法:线性模型、非线性模型、神经网络。参考文献就三种不同类型的步长估计模型做了一个对比研究,并同时加入航向误差因素,最终说明其实选择不同步长模型在不考虑航向误差的情况下,定位精度差异不大,PDR算法中的关键 问题是航向误差校准。考虑到算法的可移植性,选用相对简单的非线性模型。
S
k
=
K
.
A
m
a
x
−
A
m
i
n
4
S_k=K.\sqrt[4]{A_{max}-A_{min}}
Sk=K.4Amax−Amin
其中,K为模型系数;
A
m
a
x
A_{max}
Amax和
A
m
i
n
A_{min}
Amin分别表示一步内加速度的最大值和最小值。
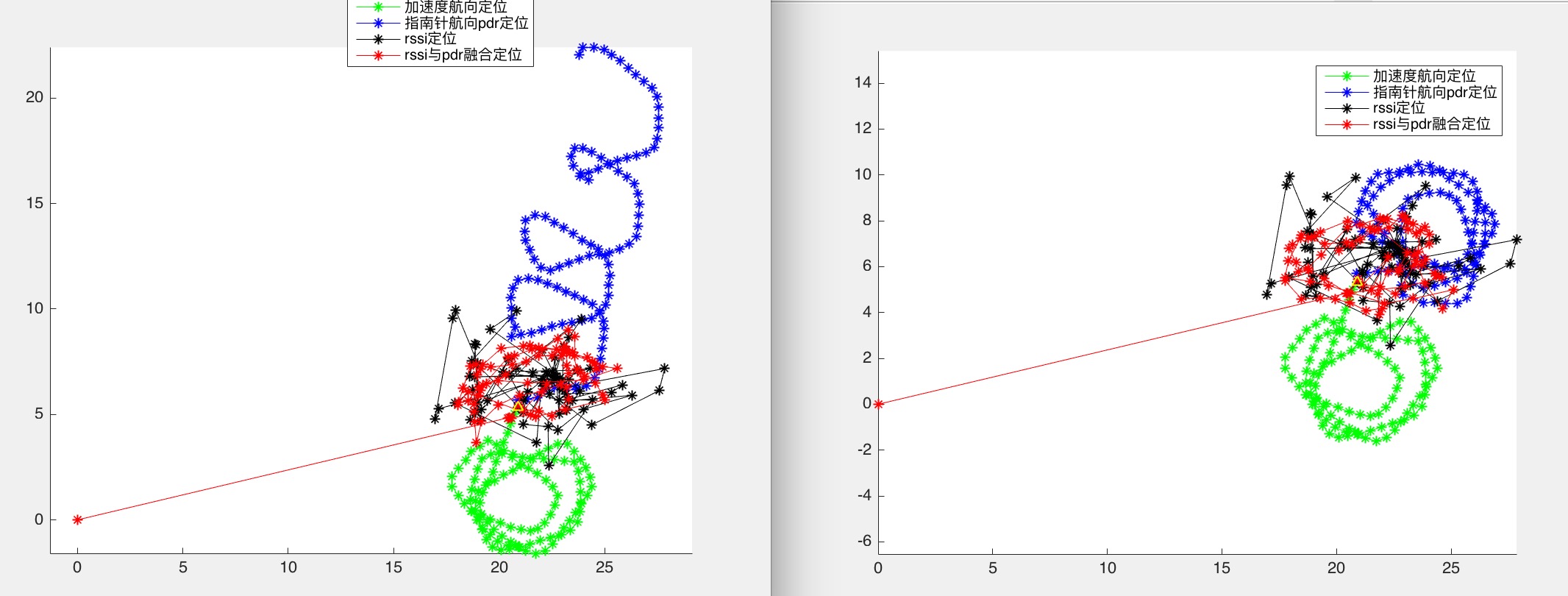
- 更新PDR定位结果
初始坐标+每一步的位移即为当前定位坐标。即使,是使用了加速度双积分航向对磁罗盘航向进行了校准,单一的使用惯性导航,目前还没有达到较好的精度,其中的航向还是需要与rssi定位融合。
:
后续。。。略
作者 [@yin]5
2017 年 02月 12日

















 290
290

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









