







Apollo各模块分析
Apollo各模块分析
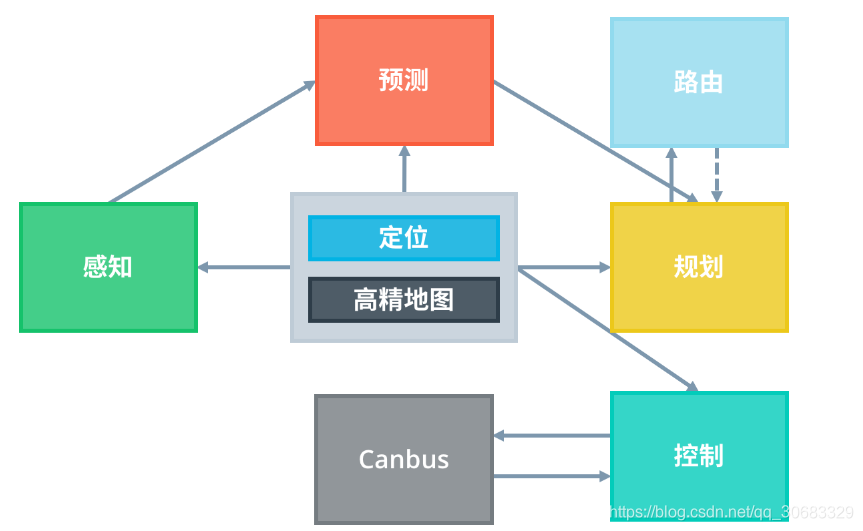
百度的Apollo是国内著名的开源无人驾驶解决方案项目,其主要由商用版本ROS构成,具体组件分为:
- 定位
- 感知
- 预测
- 路由
- 规划
- 控制
定位
Apollo是基于高精地图的解决方案,所以重定位,定位也分很多种,该模块主要是提供定位服务,默认下的情况一般有两种方法,
1.基于GPS和IMU融合后的信息再进行RTK校准,可以得到一个厘米级误差的定位信息,定位信息包含航向角、速度、加速度、经纬度、UTM等等。
2.基于GPS、IMU融合激光雷达点云地图的激光定位法,通过基本的GPS和IMU,再配合激光点云图,通过激光雷达进行激光定位,或者相同原理进行视觉SLAM定位,是主流的无人驾驶定位方法之一。
其输入主要有:
输入:
GPS-全球定位系统。
IMU-惯性测量单元。
或者:
GPS-全球定位系统。
IMU-惯性测量单元。
激光雷达-光探测与测距传感器、camera等等。
感知
通过该模块,我们可以利用当下很流行的NN网络来获取无人驾驶中一系列的障碍物信息、红绿灯等等外部信息,只有拥有了这些外部信息,我们才可以进
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 4089
4089

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









