







前言
清华计算几何-ConvexHull(凸包)-求极点InTriangle/ToLeft Test-优快云博客
上篇博客描述了一种从点集合暴力求解极点的算法,复杂度为O(n4), 耗费相当高. 下面介绍一种优于暴力求极点的算法
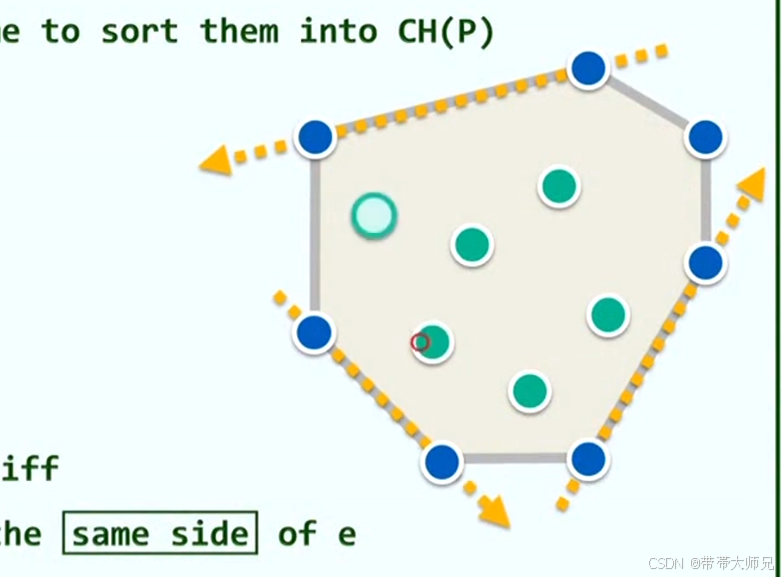
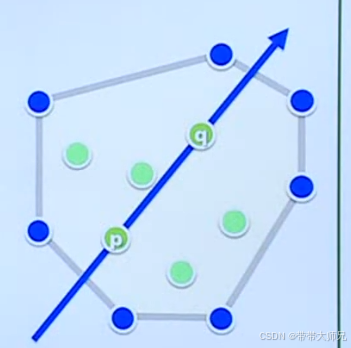
极边(extremity edge)
和极点概念类似, 如果点集合中,存在两个点连成一条线, 其他点都在这条边的同一侧,则这条线为极边(extremity edge), 这两个点为极点。
算法思路
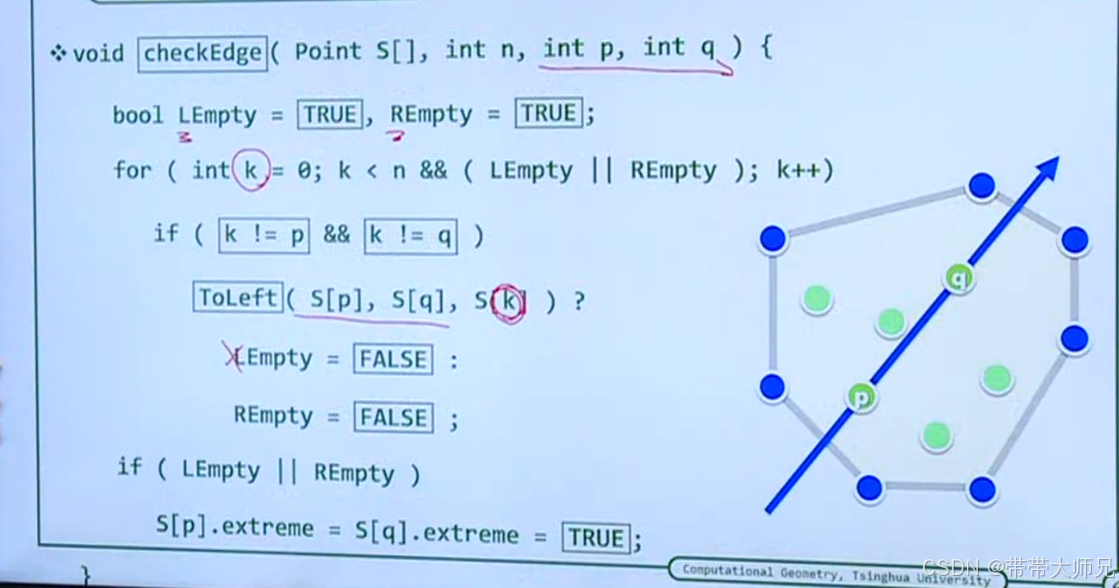
遍历所有的边, 判断其他点是否都在这条边的同一侧。
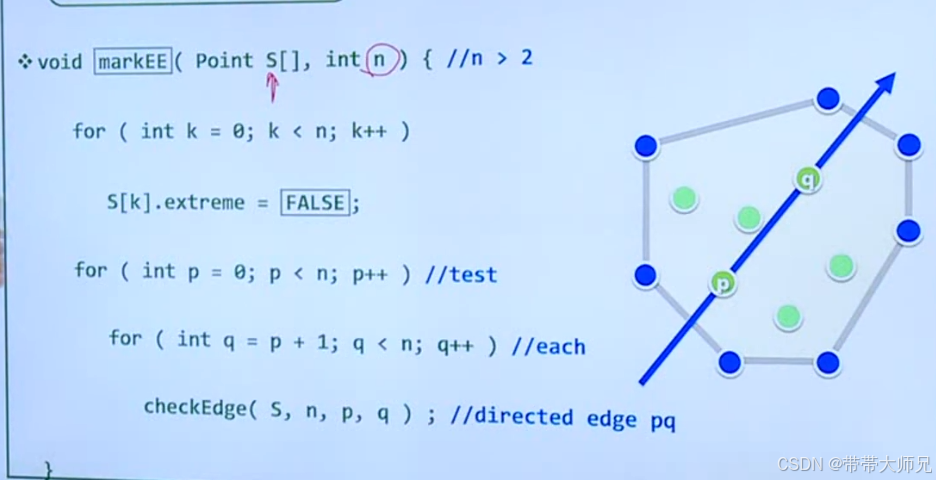
算法复杂度: O(n3), n2用于遍历所有边,n用于遍历所有点
伪代码实现
代码实现
#include <iostream>
#include <vector>
using namespace std;
struct Point
{
float x;
float y;
bool extreme;
};
float Area2(const Point& inPointA, const Point& inPointB, const Point& inPointC)
{
float value =
inPointA.x * inPointB.y - inPointA.y * inPointB.x
+ inPointB.x * inPointC.y - inPointB.y * inPointC.x
+ inPointC.x * inPointA.y - inPointC.y * inPointA.x;
return value;
}
bool IsLeftTest(const Point& inPointA, const Point& inPointB, const Point& inPointC)
{
return Area2(inPointA, inPointB, inPointC) > 0;
}
void CheckExtrmtiEdge(vector<Point>& inPoints, int idxA, int idxB)
{
bool bLeftEmpty = true;
bool bRightEmpty = true;
int pointNum = inPoints.size();
for (int idx = 0; idx < pointNum; idx++)
{
if (idx != idxA && idx != idxB)
{
if (IsLeftTest(inPoints[idx], inPoints[idxA], inPoints[idxB]))
{
bLeftEmpty = false;
}
else
{
bRightEmpty = false;
}
if (!bLeftEmpty && !bRightEmpty)
break;
}
}
if (bLeftEmpty || bRightEmpty)
{
inPoints[idxA].extreme = true;
inPoints[idxB].extreme = true;
}
}
void GetEpFromExtrmtiEdge(vector<Point>& inPoints)
{
int pointNum = inPoints.size();
for (auto& point : inPoints)
{
point.extreme = false;
}
for (int idxA = 0; idxA < pointNum; idxA++)
{
for (int idxB = idxA + 1; idxB < pointNum; idxB++)
{
CheckExtrmtiEdge(inPoints, idxA, idxB);
}
}
}
int main()
{
std::cout << "Hello World!\n";
// point set contruct
vector<Point> inPoints =
{
{0, 0},
{-1, -1},
{5, 2},
{4, 5},
{3, 3},
{-1, 3},
{2, 2},
{-3, 2},
};
GetEpFromExtrmtiEdge(inPoints);
for (int index = 0; index < inPoints.size(); index++)
{
if (inPoints[index].extreme)
{
printf("(%f, %f)\n", inPoints[index].x, inPoints[index].y);
}
}
}运行结果
对于和上节同样的数据集,得出的结果一致
参考资料
[1]清华计算几何 P13-P15

















 716
716

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









