







### 4、类型别名(typeAliases)
- 类型别名是为 Java 类型设置一个短的名字。
- 存在的意义仅在于用来减少类完全限定名的冗余。
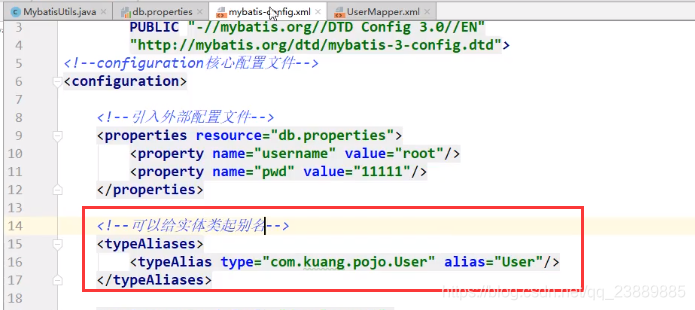
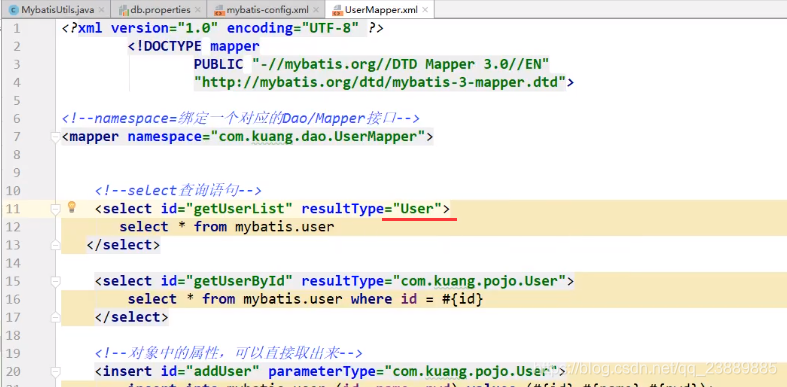
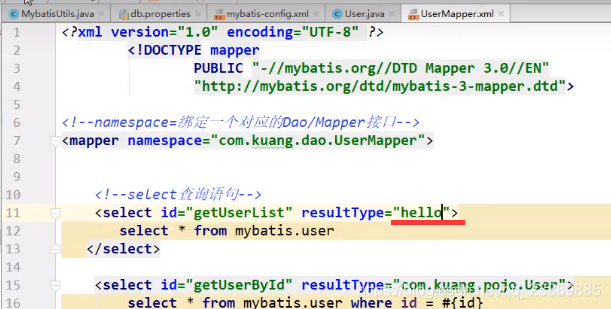
现在这里就可以改成别名
也可以指定一个包名,MyBatis 会在包名下面搜索需要的 Java Bean,比如:
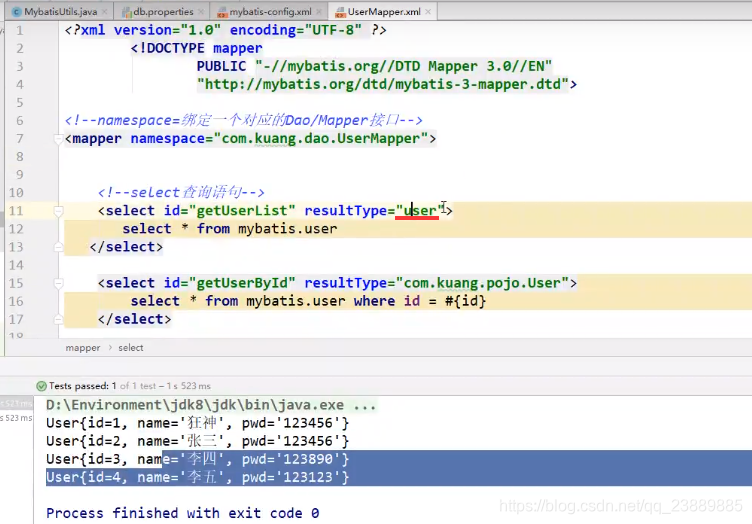
扫描实体类的包,它的默认别名就为这个类的 类名,首字母小写!
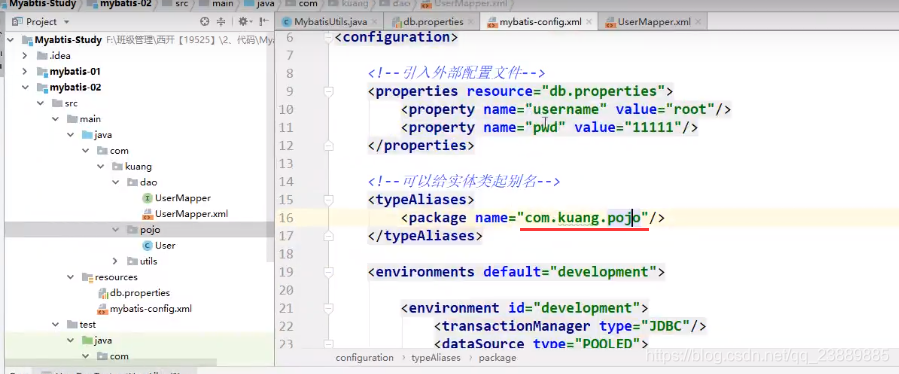
在实体类比较少的时候,使用第一种方式。
如果实体类十分多,建议使用第二种。
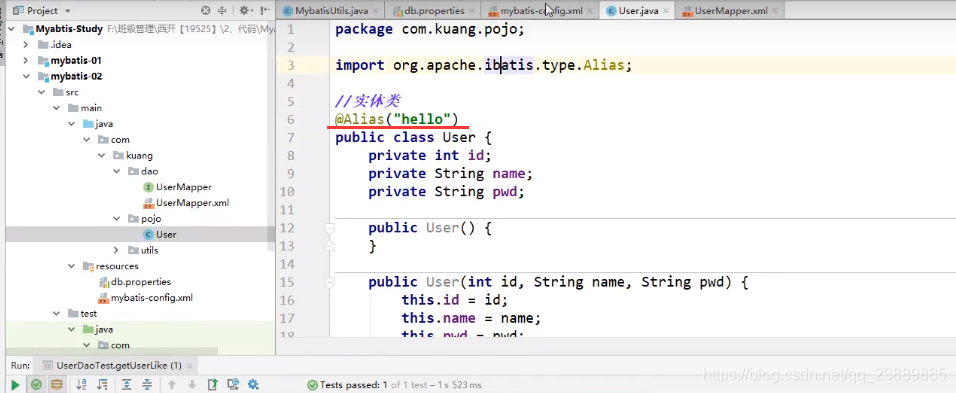
第一种可以DIY别名,第二种则·不行·,如果非要改,需要在实体上增加注解
通过注解指定别名
### 5、设置



















 265
265

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









