







 本文主要探讨了VINS-Mono运行时无法显示轨迹的两个原因:一是代码问题,可能是由于特定版本的更新导致的错误,解决方案是回退到稳定版本;二是环境配置问题,包括eigen3版本冲突和ceres与VINS-Mono的eigen3版本不一致。解决这些问题后,一般可以避免vins_estimator的报错。
本文主要探讨了VINS-Mono运行时无法显示轨迹的两个原因:一是代码问题,可能是由于特定版本的更新导致的错误,解决方案是回退到稳定版本;二是环境配置问题,包括eigen3版本冲突和ceres与VINS-Mono的eigen3版本不一致。解决这些问题后,一般可以避免vins_estimator的报错。
1 代码原因
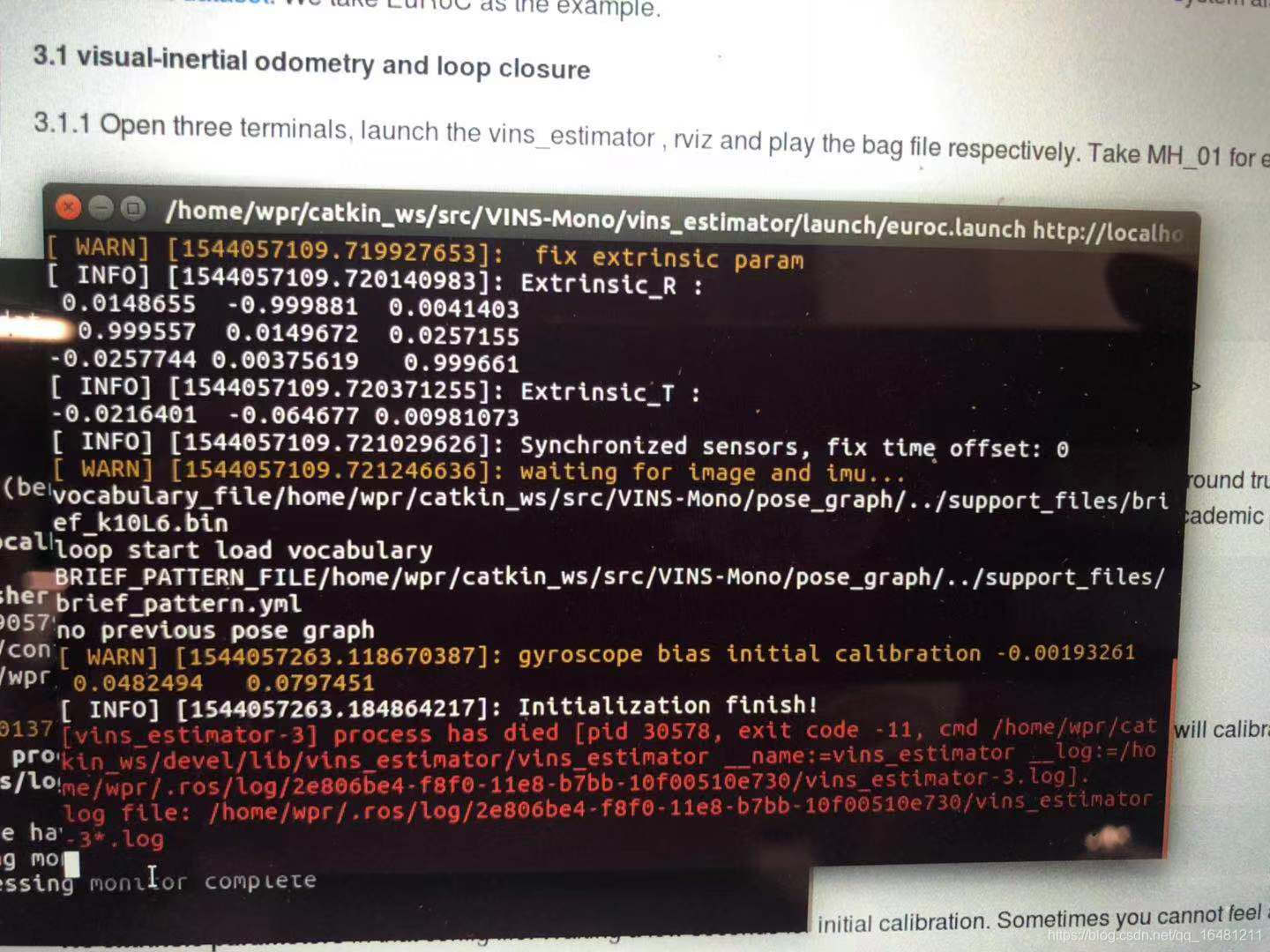
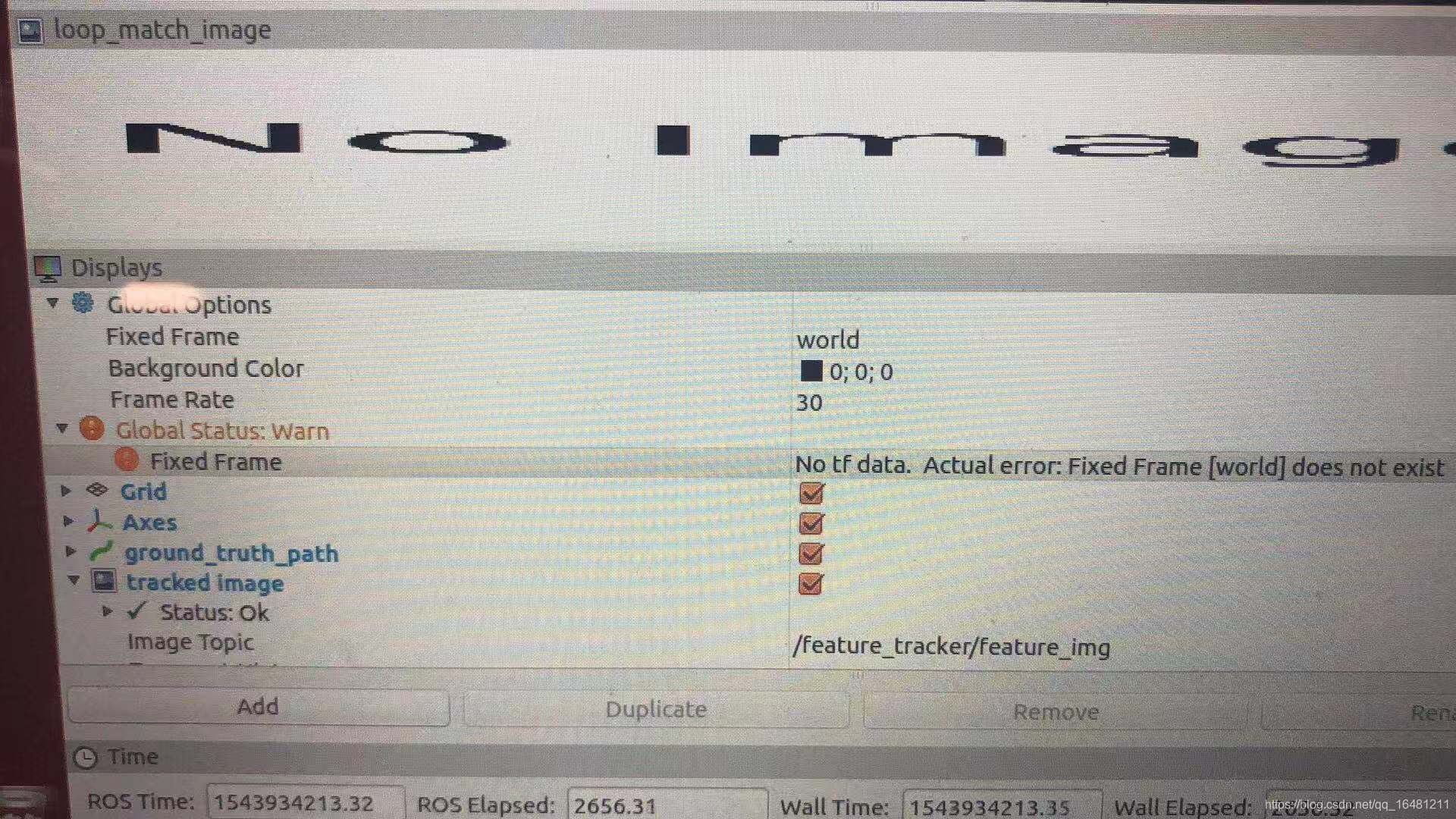
最近这一周(2018年12月1日起)测试估计很多人都会遇到轨迹没有出现,vins_estimator报错的问题。
报错如下图所示。
解决办法:对应的Issue
换一个之前版本的(18年8月17日那次提交的可以用)。
在VINS-Mono目录下执行
git checkout b638c08
2 环境配置原因
如果修改了还是有问题,说明是自身配置的问题了。
可以参考这个问题的讨论
第一:我们要确保自己电脑上的eigen3版本只有一个,
sudo updatedb
locate eigen3
第二:确保自己电脑的ceres编译使用的eigen3版本和VINS-Mono是一致的。
最后我电脑的环境为
ubuntu 16.04 64位
ROS Kinetic
opencv3.3.1
eigen3.3.3
ceres-solver 1.4.0
确保上面没问题基本就不会报错了。


















 2838
2838

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











