






Prescan8.5学习笔记
新建一个项目
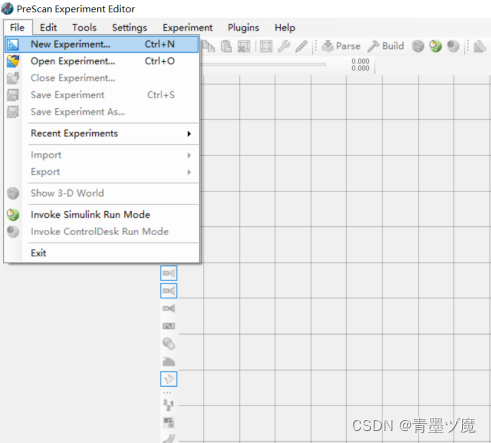
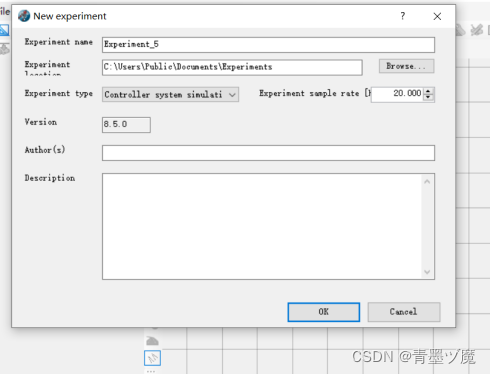
第一行是例程的名字
第二行是保存路径
第三行是类型 分别为 GPS Controller senior
创建之后会生成一个 .pex文件 之后可用这个文件打开之前的例程
创立一个路面

这里可以分别创立不同的对象
常用的有environment 创立草地、大理石等路面
第二个为道路 可以创立不同类型的路面属性
Actions 里面有车、人、盒子、球等可以创立
Senior可创立各种不同的传感器
Visualisation aids可创立人的不同观测视野
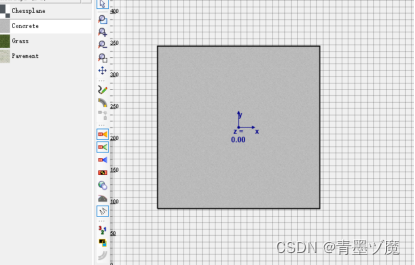
下面我们具体创建一个路面环境
选择environment路面的concrete 拉拽的右边的空地上,然后放开鼠标(点住鼠标左键不放,拉过来)
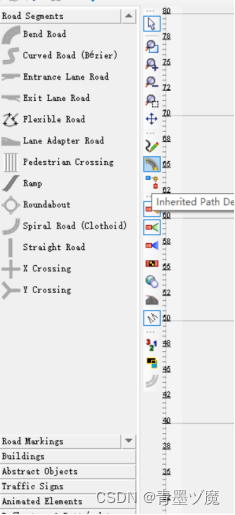
选取第二个enfrastroture 里面的straight road直线路段 拉拽到右边场景中
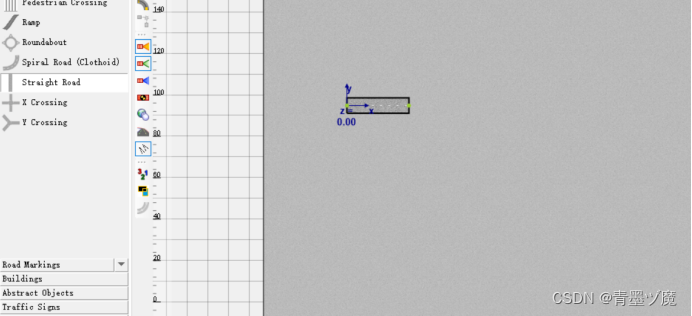
可以按crtl键加鼠标左键选择拉伸,也可以选择右边的属性进行改变参数设置 鼠标左键点击俩下,会出现 。同时右键路面也会出现一些改动比如删除 复制 剪切 已经第一个的相关属性
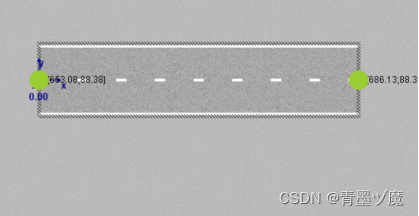
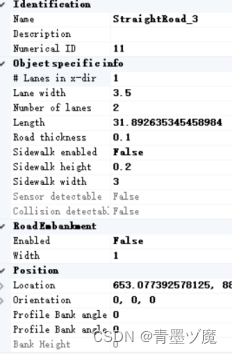
我们把路面拉长到50
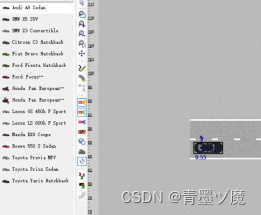
之后到aotor里面选择一辆车(这里有不同的车可以选择)
同样拉拽到右边的路面
(如果你也和我一样有选择困难的话请选择第一辆奥迪a8)
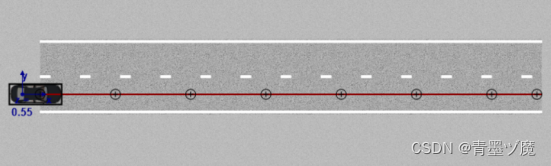
之后我们进行路面轨迹的建立

选择这个按钮鼠标左击一下
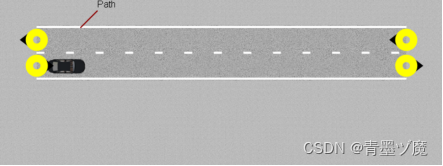
这时我们可以点击左边下面的黄色圆圈和右边下面的黄色圆圈 建立起一个简单的道路模型
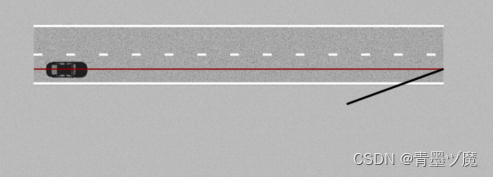
鼠标右键点击一下会放弃选择 这时我们的一个简单道路模型就建立好了
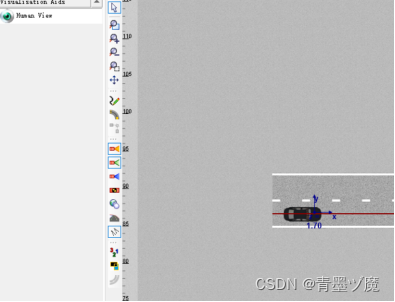
这时我们添加一个人眼视角
选择visn aids里面的人眼视角 拉拽到车前方 选择custom、OK 将里面的X方向改为-5 建立一个后方视角 OK 然后把我们的车拉到路径中 会变成这个样子
好了 我们来运行一下
选择正上方的build 之后点击开始(一个像播放键一样的按钮)可以看到我们的车运行了

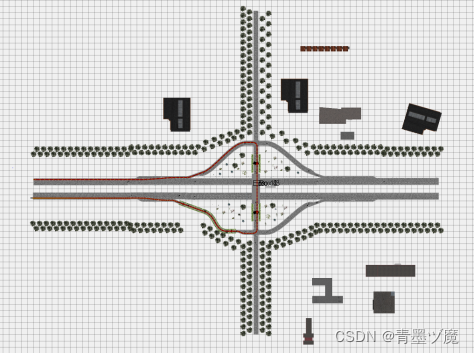
这时我们也可以选择添加一些元素让我们的路面更加真是
选择 environment里面的nature elements添加一些树 (我选的第一个)
再选择enfrastroture里面的buildings 盖一座房子 (还是第一个)
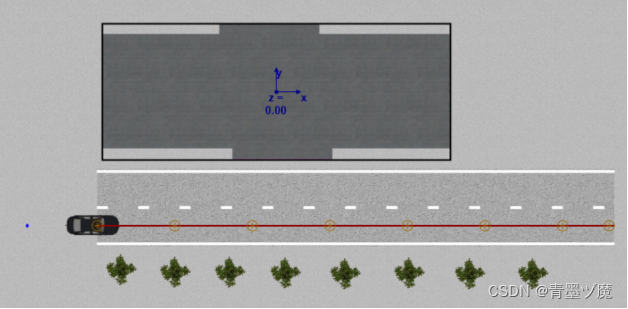
增加一些行人在路面
选择aotors里面的humans 添加一些人进去(第一个第一个!!)
3维
之后build一下 这次我们看3维的
点击build右边的3D模块 静等一小会 好了 它出现了

稍等一会 我的还没好!(我的卡住了)
这时 我们鼠标右键选择camera 选择下面的human vew_1

再点击这里的俩分格
炫酷的界面产生了
我们可以把右边的图用鼠标滚轮调整一下位置
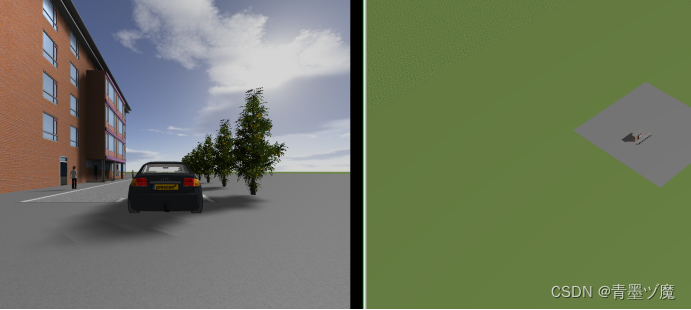
然后返回我们的2D界面(最开始用的那个) 点击开始(播放键)然后转到3D界面里面
看吧 一看一个不吱声
改变天气情况
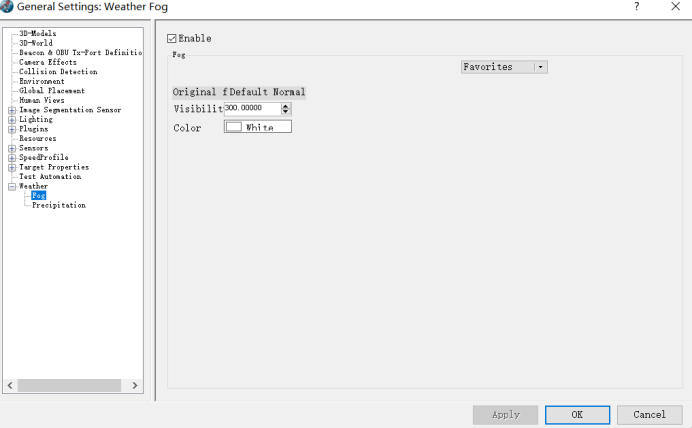
选择build 旁边的weather settings

最下面有weather选项 可以选择 雾、雪、雨
我们选择 fog 选取enable 就是已经开启了雾天气 数值显示能见度 颜色默认为白色
Precipition里面可以选择雨和雪 下面也是一些参数选择 可以选择默认
我们这里选择一个雾雪天气
Build一下(说明 build相当于我们单片机中的编译 更改之后必须build)
然后我们返回3D界面
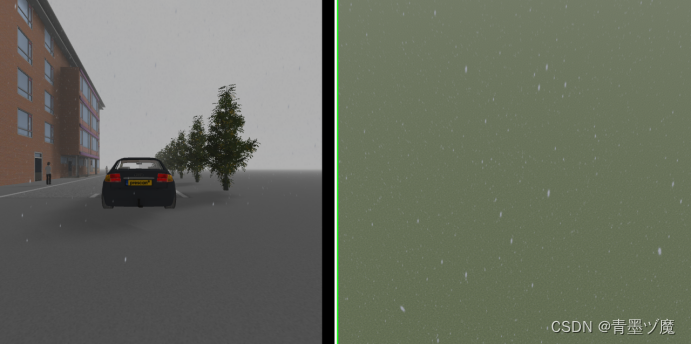
右边界面和我的不一样(鼠标滚轮划几下调整一下)
好了 原神,启动=!
好了 基础的会了 请下面独立完成以下任务(来自网络节选,如有侵权,请联系删除)

回归正题 接下来我们看matlab中的运用
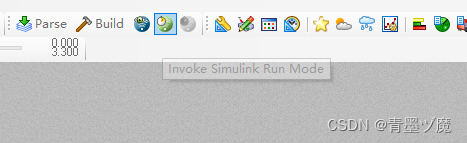
如果你恰好安装了matlab 那么请点击build旁边的simulink模块
首先 你的prescan与matlab中的路径需要一样 打开matlab之后 将matlab中的路径设置
这是你能用matlab最基本的
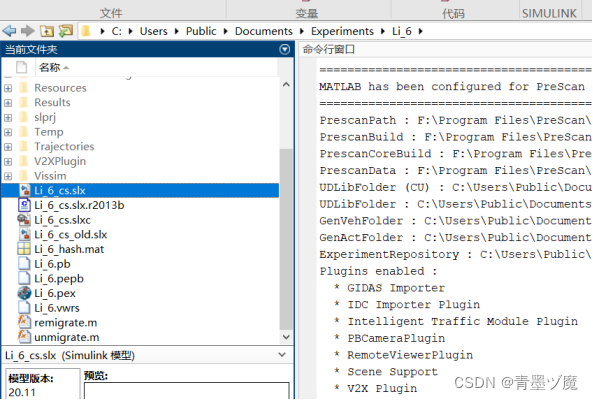
双击.slx文件就可以打开Prescan里面创建的模块 打开的话就是这个样子,右边应该是空白的 然后点击这里的regenerate (也是相当于编译),然后就会变成这个样子

我们可以双击其中的模型进入 这就是里面的样子

这里面可以具体的对一些人物车辆模型进行控制 输出数据进行仿真运算
进行一些数据采集和数据分析
现在我们简单演示一下 打开车辆模块
在空白地方双击输入scope 这是一个数据采集的不知道什么玩意
然后我们把左边的velocity 先鼠标左选上滑把那个接D的删除 然后连接俩条线如下(快捷键 按 住ctrl 选左边的 然后再选右边的)
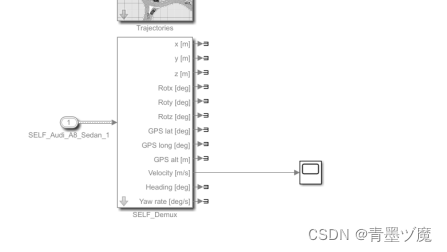
然后我们双击这个刚创建的scope模块
然后我们点击matlab里面的运行 停止时间可以选择4s 或者inf(就是一直运行)也可以
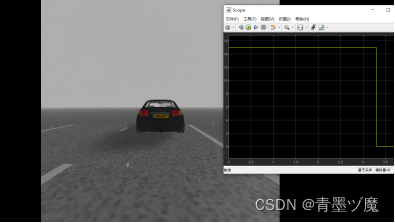
在或者在打开的scope里面点击那个播放键 这时候会自动打开3维的那个界面

这里的时间要和我们的怕热scan里面的时间对应 这里显示3.3s那我们比它长就行 或者你就选择3.3秒 (选择困难请选择4s)
然后画面就是这样的 (这里显示的是他的速度信息)这里显示的是15米每秒
我们可以返回prescan界面 右击车辆选择object
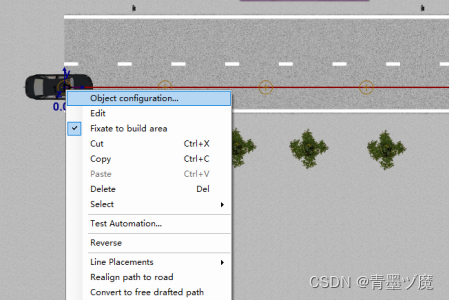
在默认里面像我这样点击tarjiectory 右击第二个速度模型 选择edit 打开
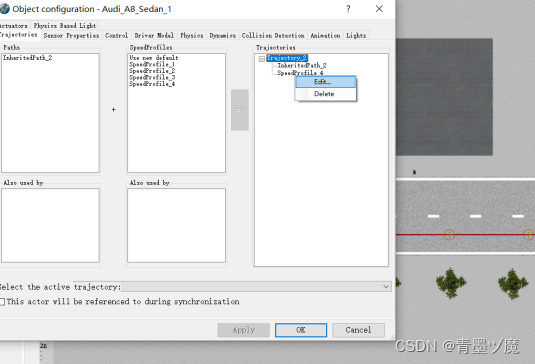
这里我们可以看到车辆速度是15米每秒 当然我们可以更改这里的速度 然后去matlab里面再运行一下 速度会发生改变
传感器设置
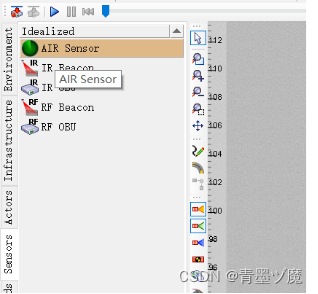
接下来我们看一下传感器设置 选择senior里面的 air 还是拉拽到车上 数据选择默认
然后我们返回matlab中 记住任何改动都要build regenerate一下
打开车模型 里面多出来一个这个
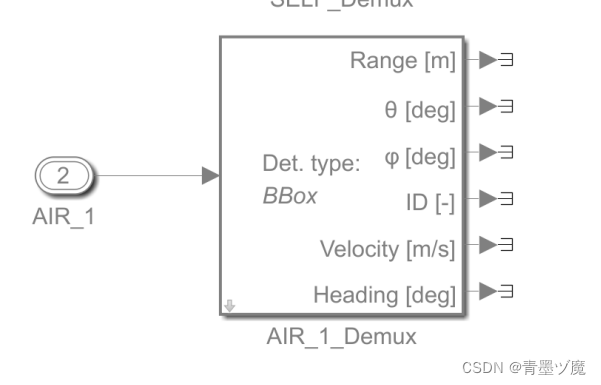
这就相当于增加了一个传感器 我们可以把不同的数据采集出来 同时我们可以选择不同的传感器 像鱼眼摄像头 超声波 激光雷达等都可以设置(在deailed里面 ultrasonic超声波、
Fisheye camera鱼眼摄像头 lidar激光雷达等等等等)
实战案例
熟悉的AEB
可以看这个视频 我也是跟者这个做的(看不懂我的的话)
【Simcenter Prescan 快速入门系列】 第2期:搭建MiL闭环仿真 - 验证AEB算法_哔哩哔哩_bilibili
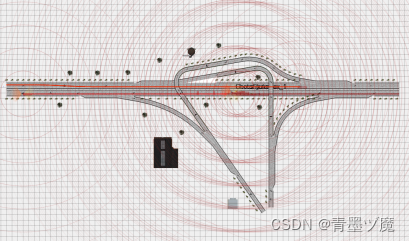
首先我们创立一个这样的界面
然后在matlab中编写
欧克 运行成功 搞定 完结撒花!

好了 你不会以为我这里要讲吧 crazy!(绝对不是本人懒)自己看视频去
人美心善的我帮你们总结了一点
回归正题
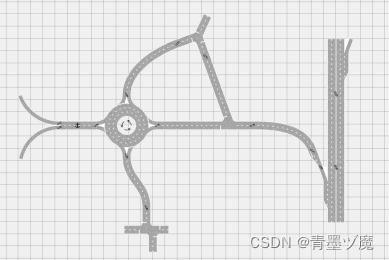
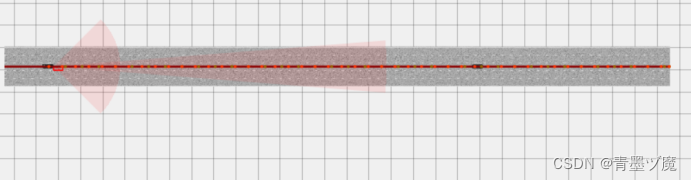
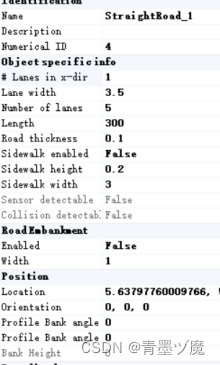
首先 建立一个这样的界面
我们先拉一条直路出来 把路长设置到300 (这里我设置的是5条车道线)只需要把这里的number of lanes设置成5就可以了
依旧是添加路径 在这 别忘了
还是像之前一样,设置一个人眼视角 在他的后方 设置为-5
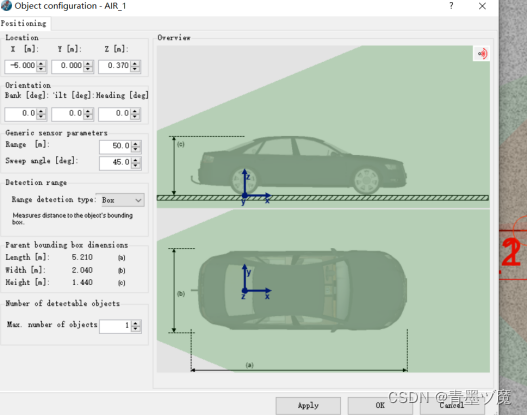
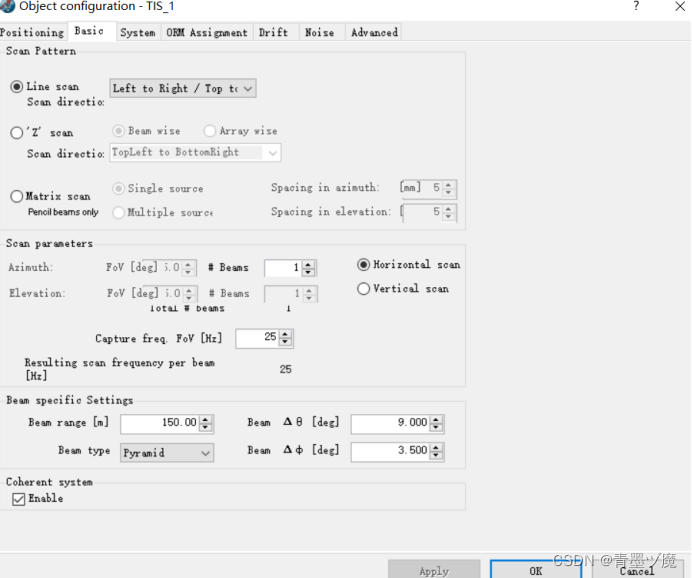
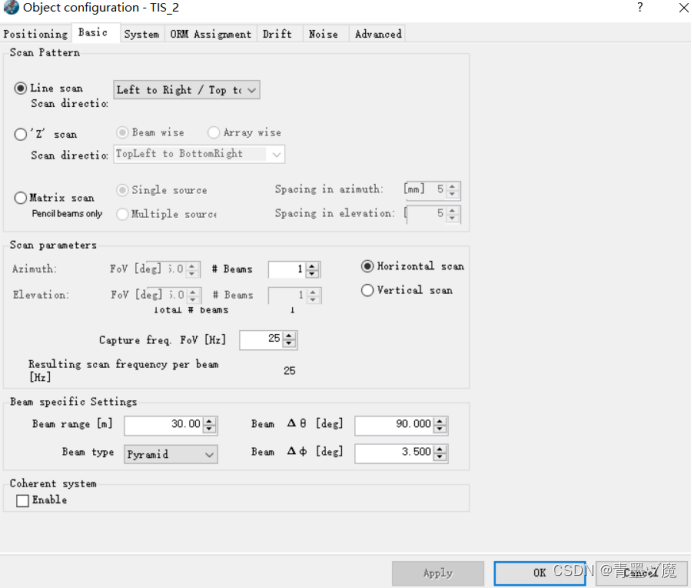
这里我们添加俩个tips 在seniors里面的detailed里面 选择俩个tips
分别设置不同测量路径的tips
第一个tips在basic里面的角度设置为150、9、3.5
第二个tips设置为30、90、3.5 不选择下面的enable
Build运行 然后转战matlab
首先在空白处双击 model
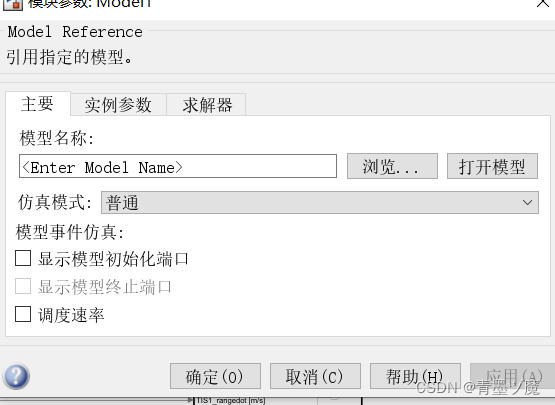
点击游览 C:\Users\Public\Documents\Experiments\TestScenarios\AEBS\includes_AEBS
在安装prescan路径里面找
然后点击确定
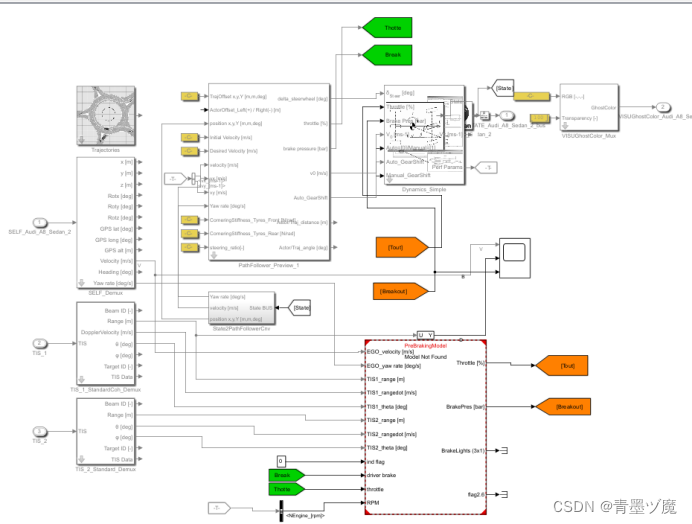
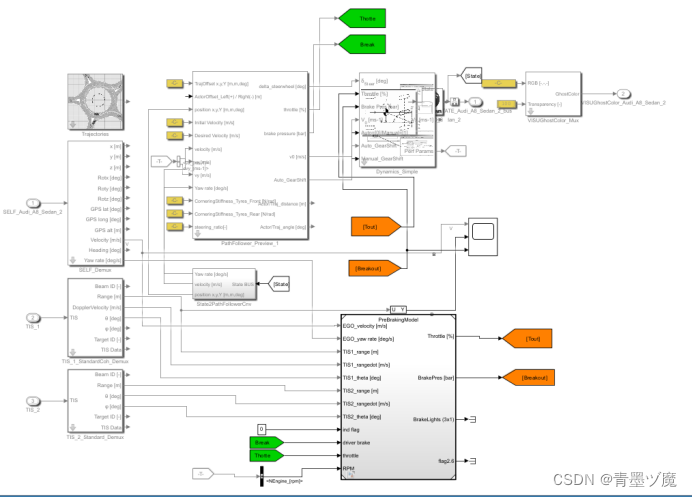
下面是具体的接线图 (接线图图片转载)
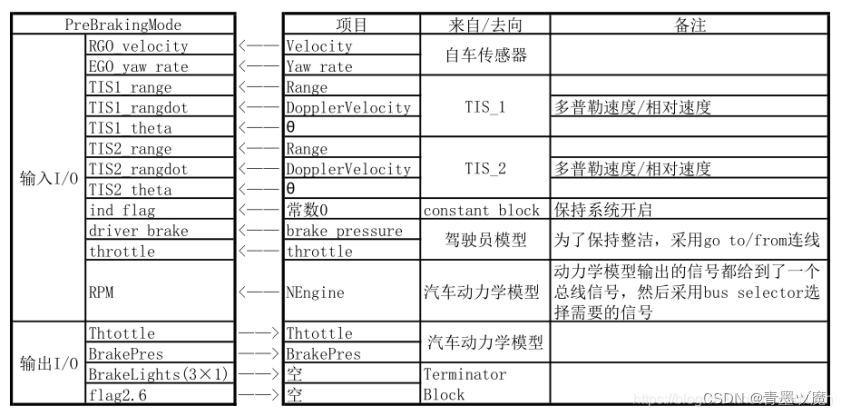
之后需要创立几个全局变量来调用数据
双击空白处 输入goto 标记可见性设置全局 名字必须改 首字母大写
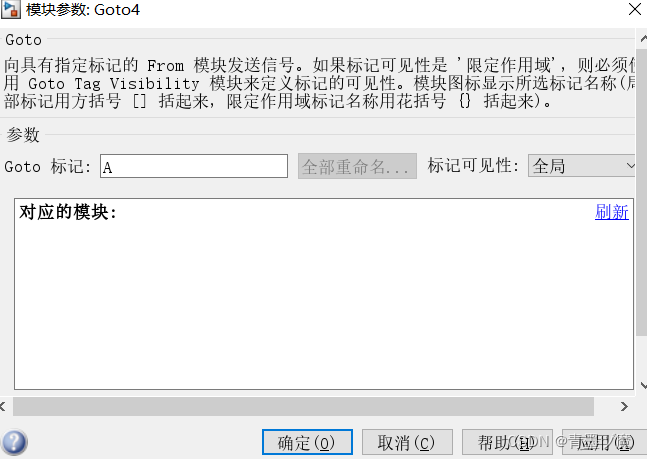
分别如图设置
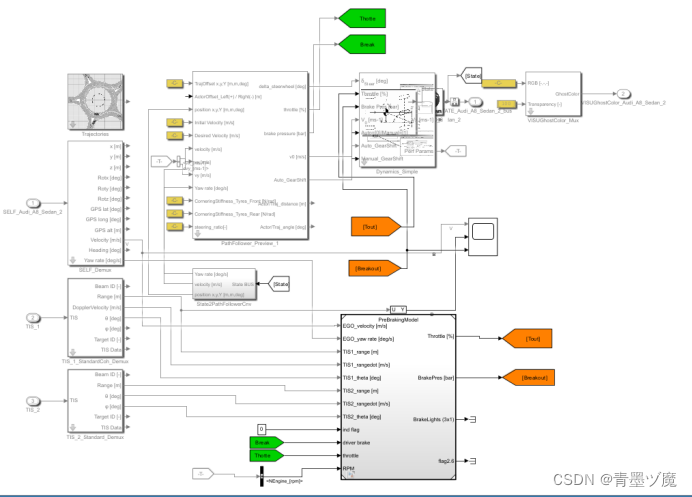
之后就可以运行了
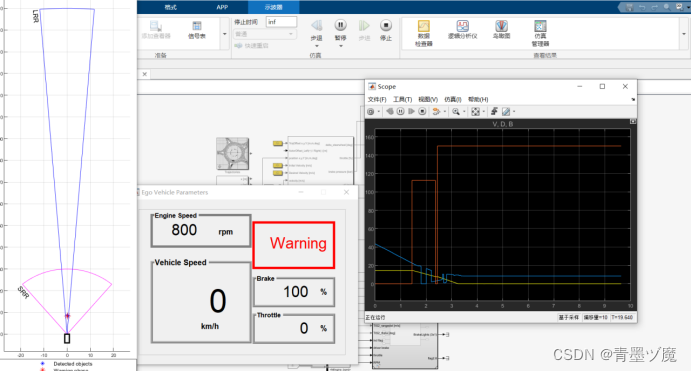

1.1AEB检测
完结撒花~!

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









