




内容来自AN5191:《Using the programmable region of interest (ROI) with the VL53L1X》
介绍
VL53L1X允许选择感兴趣的区域(ROI)。本文档解释了如何将ROI从27°视场(FoV)降低到15°。
文档范围
本文档解释了如何配置VL53L1X的ROI,以减少接收器SPAD阵列上的传感区域FoV。这可以通过使用SW驱动程序应用程序编程接口(API)或评估工具包图形用户界面(GUI)来实现。
在此应用注意事项:
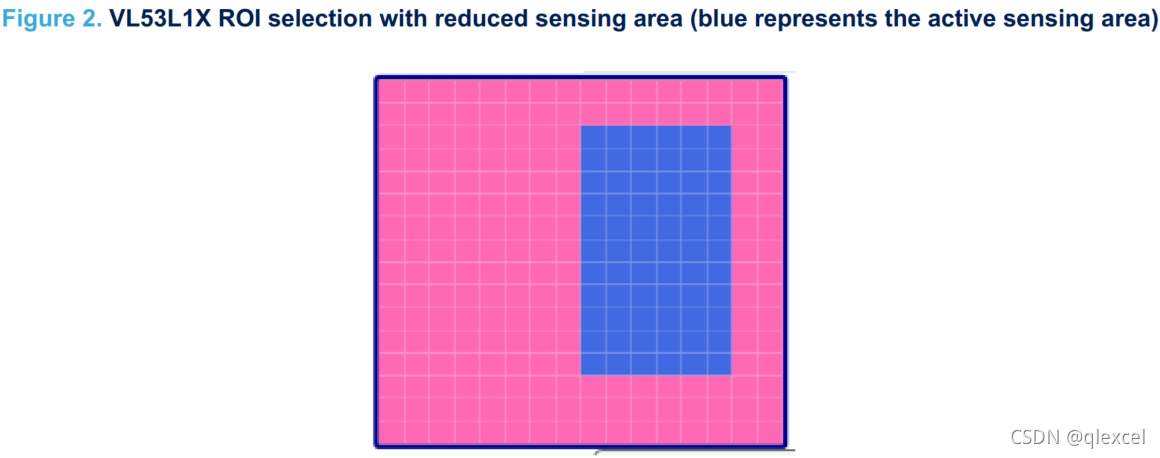
•“ROI选择”是指将减少的传感区域定位在SPAD阵列上选定的位置,检测和测量外部场景指定感兴趣区域的距离。
•“缩小视场”意味着减少ROI传感区域的SPADs数量,以限制传感器设备的视角。
选定的ROI可以通过x轴和y轴上的任何边缘坐标组合来定义,保持最小尺寸为4x4。
本文档还提供了一些ROI选择的建议,考虑到距离性能的权衡和用例拓扑。
飞行时间传感和ROI原理
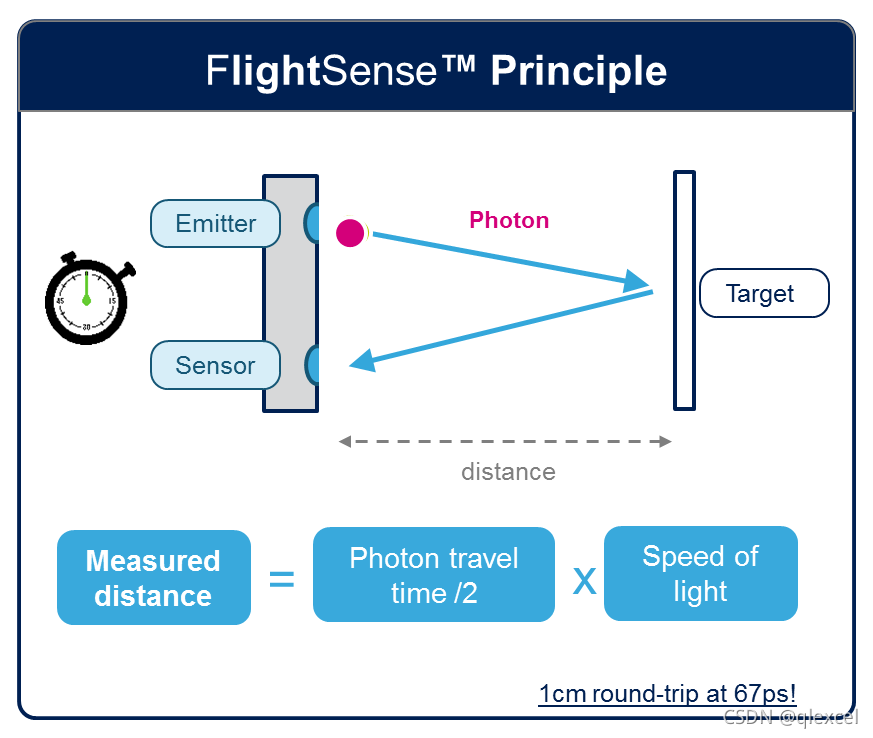
VL53L1X设备是一种先进的光学设备,允许距离测量和目标探测。该装置采用了飞行时间原理(ToF),这是一种测量传感器和物体之间的距离的方法,基于VCSEL光信号的发射和它被物体反射后返回到传感器之间的时间差。
VL53L1X嵌入:
•发射器,垂直腔面发射激光器(VCSEL)
•接收器,一组单光子雪崩二极管(SPADs)
激光发射的光子反射到目标上,当返回SPAD时引发雪崩。
光子发射到雪崩(ToF)之间的时间被测量,并在距离结果寄存器中转换成目标距离。
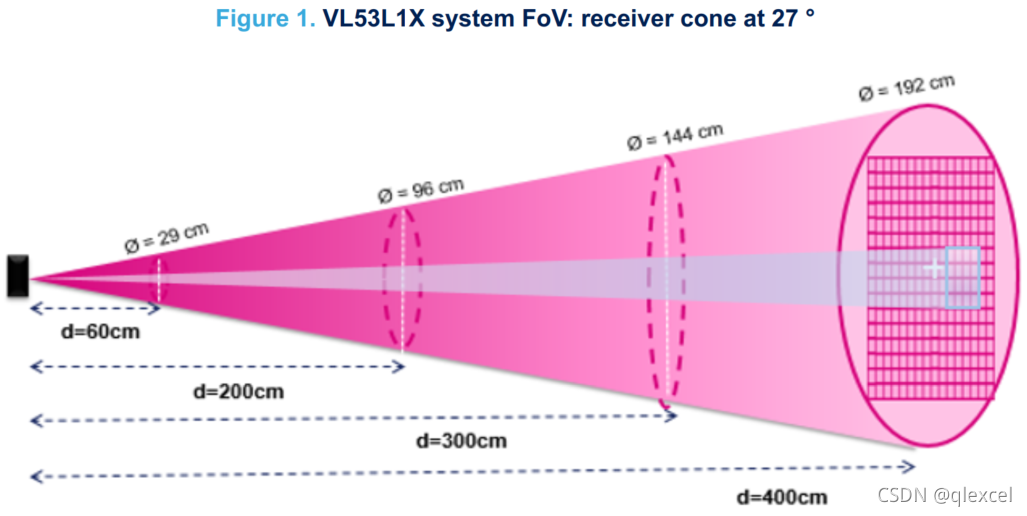
虽然VCSEL发射的光束不是完全对称的,但可以看作是一个锥体。这样的光束有97%的光功率存在于一个27°的锥中。
由于在出射路径中没有使用光学元件,所以这是VCSEL的固有性能。VCSEL上的玻璃是一个简单的红外滤光片,以减少对t0时间测量的干扰。
发射锥:
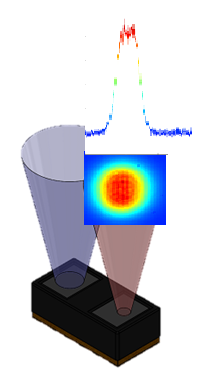
在接收器一侧,有一个由聚光透镜覆盖的SPAD阵列。因此,由于spad的数量有限,该系统可以看作是一个粒度较大的摄像机子系统(见下图)。
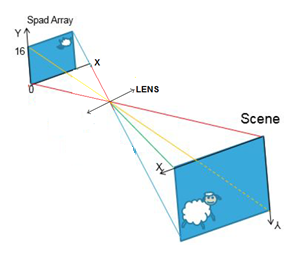
使用16x16 SPADs,设备接收器的全对角线视场为27°。
VL53L1X传感器体系结构允许选择具有较少SPADs集的roi,从而减少传感面积,并允许减少接收机FoV。唯一的条件是ROI必须拥有至少4x4个spad的数组。
综上所述,发射体FoV不能被VCSEL修改,系统继续发送测量为27°的FoV。相反,接收机FoV可以降低,它可能只测量感兴趣的场景的一部分。
设置SPAD阵列
SPAD阵列由16x16个SPAD组成。在固件检查过的每个方向上,最小可选择的SPAD数为4(例如,如果客户程序选择了2x8阵列,VL53L1X固件将重写参数并选择4x8阵列)。
对SPAD阵列寻址
SPAD是通过SW驱动程序API来处理的(更多信息请参阅UM2356)。
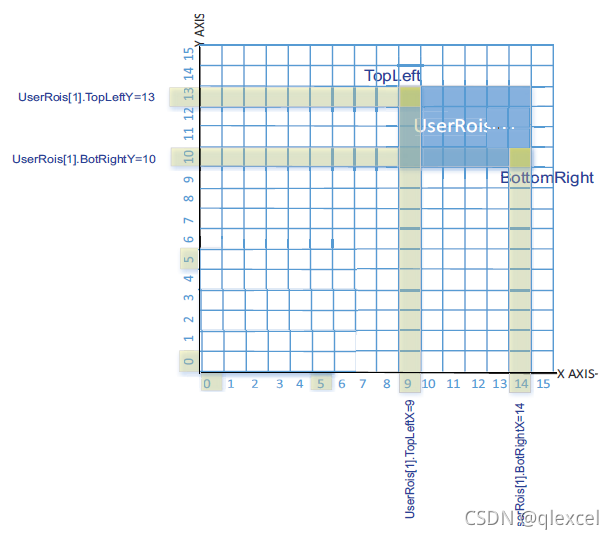
为了选择FoV和ROI,程序调用VL53L1_SetUserROI()例程,如下所示:
VL53L1_RoiConfig_t RoiConfig;
RoiConfig.UserRois[0].TopLeftX = 9;
RoiConfig.UserRois[0].TopLeftY = 13;
RoiConfig.UserRois[0].BotRightX = 14;
RoiConfig.UserRois[0].BotRightY = 10;
Status = VL53L1_SetUserROI(Dev, &RoiConfig);
校准SPAD阵列
补偿依赖于ROI。因此,如果需要5厘米的精度,则需要每个区域进行一次偏移校准。
扫描多个ROI
VL53L1_SetUserROI()例程必须在VL53L1_StartMeasurement()之前调用。然后可以使用停止函数VL53L1_StopMeasurement()更改两个度量之间的ROI。
性能&推荐
ROI大小和视角的关系

测距性能
当spad的数量减少时,接收到的光子数量也会减少。因此,串扰和返回光束的分布是不均匀的。根据ROI的位置,测量性能可能有所不同。
下表给出了在SPAD阵列中心的ROI测量的最小距离和测距误差。测量:
•环境=黑暗,即在940±30 nm范围内没有红外光
•目标= 100% ROI,反射率88%,即N9.5 Munsell
•时间预算= 30毫秒
•电压和温度=标称即2.8 V和23°C
•选择模式=长距离模式(参见UM2356)

测距性能权衡
减小ROI,则平均测距值的标准差增大,最大距离相对于整个区域减小。为了改善这一点,即改善可重复性,可以增加测量时间。
例如,测距时间通常为30毫秒。如果测量时间增加2,则标准差除以根号2。
拓扑建议
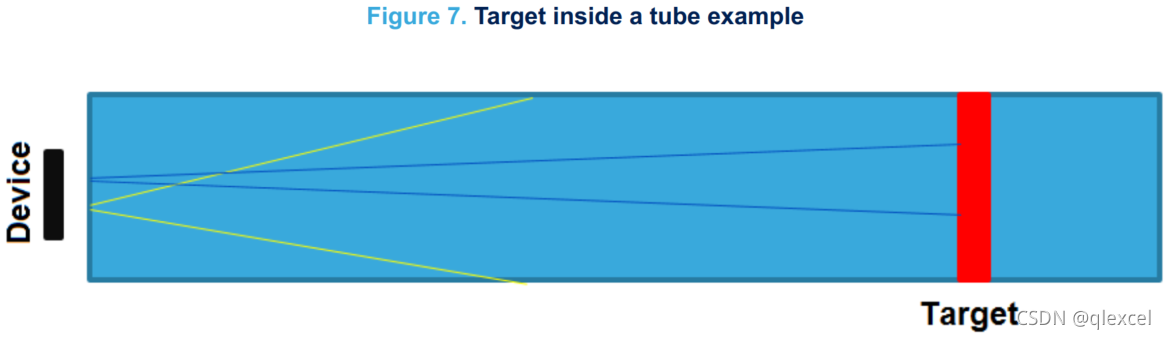
在某些应用中,需要降低ROI或可变FoV。例如,在下图中,由于FoV以27°发射,部分光线会反射到墙壁上,影响距离测量的准确性。
全束的一部分仍然到达目标并被反射回SPAD区域。这些是ToF传感器应该理想测量的光子。
然后强制限制墙壁的反射率并增加目标的反射率。
一个解决方案,如果可能的话,是在目标上放置一个反射器,这将增加目标直接返回到SPAD的光子数量。
如果这是不可能的,则可以注册结果的查找表,以提高准确性。
由于安装公差(设备在PCB上和PCB到设备),对整个ROI的扫描有助于确定ROI的最佳位置,以优化从目标返回的光子数量。


















 2万+
2万+




 到【灌水乐园】发言
到【灌水乐园】发言









