






目录
1.1 功能
读入PLY或者PCD格式的三维点云
1.2 语法
ptCloud = pcread(filename)
描述:
从输入文件名指定的PLY或PCD文件中读取点云,函数返回一个pointCloud类型的对象ptCloud。
1.3 例一
ptCloud = pcread('teapot.ply');
pcshow(ptCloud);
1.4 例二
ptCloud = pcread('cow.pcd');
pcshow(ptCloud);
1.5 输出参数ptCloud
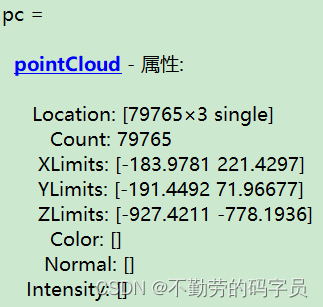
pointCloud用于存储点云的对象,作为包含以下PLY或PCD字段的点云对象返回:
- Location:位置属性,存储x、y和z值;
- Count:点的总个数;
- XLimits:X方向最大、最小值;
- YLimits:Y方向最大、最小值;
- ZLimits:Z方向最大、最小值;
- Color:颜色属性,存储红色、绿色和蓝色值;
- Normal:法线特性,存储每个点的法线向量;
- Intensity:强度属性,存储每个点的灰度强度。


















 8909
8909

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











