



ATLAS 2020的机械描述,一种10自由度儿科外骨骼
J. SANCHO‐PÉREZ, M. PÉREZ 和 E. GARCÍA自动化与机器人 研究中心,马德里理工大学西班牙高等科学研究委员会,西班牙马德 里阿兰达德尔雷亚尔坎波大道0.2公里,28500
D. SANZ‐MERODIO 和 A. PLAZA
MarsiBionics公司,28500阿兰达德 尔雷,马德里,西班牙
M. 切斯塔里
休斯顿大学电气与计算机工程系,美国德克萨斯州休斯顿,77004-4005
本文描述了ATLAs 2020的机械设计,这是一种由CAR‐CISC研究中心与 Marsi‐Bionics公司密切合作开发的儿童外骨骼,可用于恢复行走能力。
ATLAS2020为患有神经肌肉疾病(NMD)儿童的治疗提供了创新有效解决方案。
ATLAS 2020将改善这些儿童的生活质量,为他们带来更美好、更独立生活的希望。
1. 引言
ATLAS 2020 是一款具有10个自由度(DOF)的可穿戴步态外骨骼,能够 实现灵活移动性,用于脊髓性肌萎缩症(SMA)患儿的治疗。尽管这是一种罕见病,但SMA是导致儿童死亡率的第一大原因,影响着所有国家、所有种族的男女儿童。目前尚无治愈SMA的方法,现有治疗主要集中在维持患者的身体状况,并试图延缓因无法行走而导致的脊柱侧弯和其他重要健康并发症(如肺功能障碍)。ATLAS 2020 是在欧洲项目KINDER和 ExoTrainer 框架内为SMA及其他类似疾病开发的。行走对于这一目标至关重要,而ATLAS 2020 通过可穿戴步态外骨骼提供了更优的治疗方案。
由于当前的商用设备主要针对成年截瘫患者,ATLAS 2020 基于现有技术,面向新的目标群体和不同疾病。外骨骼将通过使患病儿童恢复肌肉活动和活动能力,对其生活质量及预期寿命产生积极影响。这种创新疗法可通过更高效且个性化的治疗方式,降低医疗保健成本。本文介绍了这款10自由度可穿戴外骨骼的机械设计。第2节阐述了机械结构的设计原理,并提到了电子元件。第3节描述了外骨骼与使用者之间的物理连接以及人机工程学设计的基本原理。第4节讨论了ATLAS 2020的机械设计如何实现平衡控制及其工作原理。最后,第5节为结论部分,包括提出的未来工作和研究方向。
2. ATLAS 2020 描述
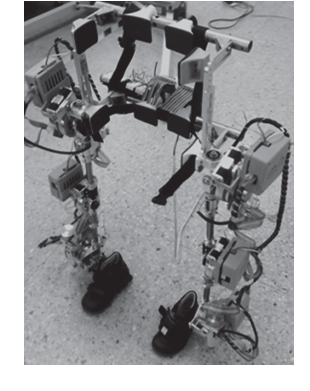
ATLAS 2020结构(图1)分为两条腿,通过 胸部连接件连接在一起。整个系统具有10自由度,每条腿包含5自由度,可实现对正常 人类步态的模拟。关节之间通过钛管连接,组件主要由钛和铝构成。
2.1. 驱动关节
这些自由度是提供以下功能所必需的:
- 髋关节屈伸
- 髋关节外展内收
- 膝关节屈伸
- 踝关节背屈跖屈
- 踝关节外翻内翻
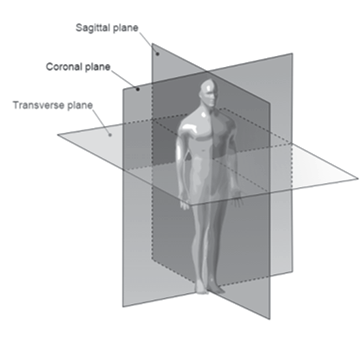
这些关节轴设计用于适应最大程度的自然运动患者。其中三个关节允许髋关节、膝关节以及踝关节在矢状面内的屈伸运动和背屈‐跖屈运动(图2)。其余两个关节允许髋关节外展/内收和踝关节外翻/内翻在冠状面内的运动(图2)。
这些自由度的选择由之前对外骨骼需求的研究决定。冠状面内的驱动至关重要,以便通过补偿自然行走在质心位移来实现步态的主动稳定性。
2.2. 关节活动范围
外骨骼具有机械限位,用于限制每个关节的活动范围。机械限位已根据针对健康受试者关节活动范围运动的公开研究,以及外骨骼在自然步态、坐姿动作和动态稳定移动过程中的重心转移动作所提出的物理要求进行了调整。
表1显示了外骨骼的最大关节角度。需要注意的是,如果患者存在关节挛缩或活动能力受限的情况,可以通过运动学编程在这些运动范围内定义操作关节角度。
| 关节 | 驱动装置 | 度 |
|---|---|---|
| 髋关节屈曲 | 旋转驱动 | 110° |
| 髋关节伸展 | 旋转驱动 | 30° |
| 髋关节外展 | 直线驱动 | 25° |
| 髋关节内收 | 直线驱动 | 10° |
| 膝关节屈曲 | 旋转驱动 | 120° |
| 膝关节伸展 | 旋转驱动 | 0° |
| 踝关节背屈 | 旋转驱动 | 30° |
| 踝关节跖屈 | 旋转驱动 | 30° |
| 踝关节外翻 | 直线驱动 | 16° |
| 踝关节内翻 | 直线驱动 | 16° |
2.3. 驱动系统
已选择两种类型的执行器来实现10个自由度的运动。以下是对这两种执行器类型的描述。
2.3.1. 旋转驱动
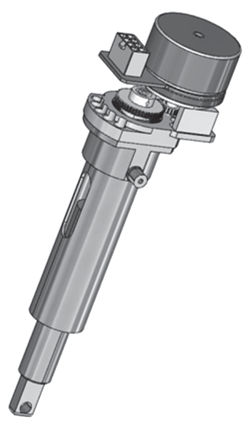
旋转驱动由包含70瓦无刷直流电机的齿轮组件构成,该电机带有霍尔效应传感器和正交编码器。齿轮的传动比为160:1。图3展示了该齿轮电机组件。

表2. 旋转驱动器规格。
| 旋转驱动 | 旋转驱动 |
|---|---|
| 额定扭矩(N·m) | 20 |
| 最大扭矩(N·m) | 60 |
| 最大角速度(RPM) | 30 |
| 额定电流(A) | 3.21 |
所选齿轮装置可在最小可能体积内实现最高减速比,同时确保良好的性能和低功耗。
2.3.2. 直线驱动
髋关节的外展/内收和踝关节的外翻/内翻通过直线驱动器实现。它们采用70瓦无刷直流电机,配备3:1前置级减速比齿轮箱,并连接至10x3滚珠输出丝杠。具有以下特点:
表3. 直线驱动器规格。
| 直线驱动 | |
|---|---|
| 最大力(N) | 1500 |
| 关节内的最大角速度(RPM) | 30 |
| 额定电流(A) | 3.21 |
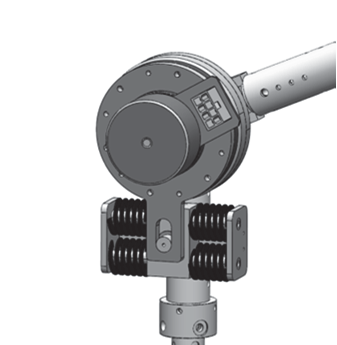
该组件(见图4)作为一个线性系统工作,连接到一个50毫米臂,将线性运动转化为关节处的旋转。选择线性系统是由于髋部存在空间限制,从而解决了在矢状面旋转点附近冠状面内安装旋转驱动的困难。
2.4. 关节阻抗控制与力感知
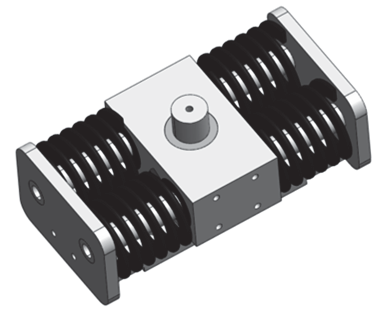
矢状面旋转执行器包含一个弹簧组件(图5),可将执行器转变为串联弹性执行器(SEA)构型。该弹簧组件是一种用于吸收使用者的冲击、振动和关节动力学的系统,有助于缓解痉挛等症状。
此外,利用胡克定律,我们得到了关节处所受的扭矩,该扭矩是与旋转轴的距离以及弹性系统中力的作用点位移之间的关系。这已在后续内容中进一步详细说明。
图6展示了膝关节处带有弹性组件的旋转系统的组件细节。
2.5. 尺寸调节系统
ATLAS 2020 是一款儿童外骨骼,因此必须适应患者在各个阶段的快速生长,适用于 3 至 12 岁的年龄范围。所有组件的设计均基于这些前提,使用者可以轻松调节每个连杆的尺寸。事实上,尺寸调节系统是该儿童外骨骼设计中的关键要素之一。设计中的其他关键因素包括系统中各管材之间的平行度,以及外骨骼尺寸调整时的刚性和通用性。
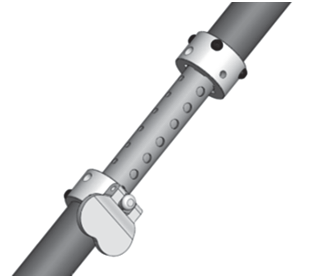
表4列出了可调节尺寸的连接件,以及其最小和最大尺寸与步长。管状系统(图7)被用于5种尺寸调节系统中的3种。这些调节可在儿童成长过程中常规调整,也支持在患者穿戴外骨骼的情况下进行原位快速更换。
躯干调节结合了滑动装置,并采用固定步长的空间分离位置(见图8)。

| Link | 最小值(厘米) | 最大值(厘米) | 尺寸调节步长(厘米) | 系统 |
|---|---|---|---|---|
| trunk深度 | 8.2 | 16.6 | 0.7 | Hole |
| trunk高度 | 11 | 21 | 0.1 | 滑动 |
| trunk宽度 | 18 | 34 | 1 | Tube |
| 大腿段 | 22 | 46 | 1 | Tube |
| 小腿段 | 21 | 45 | 1 | Tube |
| ## 2.6. 控制电子设备 |
外骨骼控制由一个中央主控制器和6个从控制器执行(见图9)。每个从控制器独立控制2个电机,并通过编码器采集受控关节的位置信息。这样一来,控制电子设备的空间和重量得以分散。
控制箱与每条腿中包含的电池配合工作。每个模块独立于其他模块运行。
电子模块通过I2C与主控器通信,控制回路每2.5毫秒重复一次。
2.7. 重量分布
ATLAS 2020外骨骼的设计旨在实现最小重量,通过使用钛和铝等材料来达成这一目标。重量主要集中在关节部位,因为执行器是外骨骼中最重的部件。由钛制成的连接件与其他组件相比非常轻。接下来较重的组件是锂离子电池。
表5. ATLAS 2020组件重量
| 组件 | 重量(克) | 单位 | 重量总和。(千克) |
|---|---|---|---|
| 带弹性组件的旋转驱动 | 650 | 6 | 3.9 |
| 直线驱动 | 465 | 4 | 1.9 |
| 关节连接件、轴承和螺钉 | 200 | 6 | 1.2 |
| 腿节部件 | 137 | 4 | 0.5 |
| 躯干连接件 | 915 | 1 | 0.9 |
| 带外壳的电子从板 | 143 | 6 | 0.9 |
| 电池组 每条腿一个 | 350 | 2 | 0.7 |
| 矫形器和物理接口 | 1000 | 1 | 1.0 |
| 带电池和电线的主控制器 | 950 | 1 | 0.95 |
| 总计(千克) | 12 |
3. 人体工程学
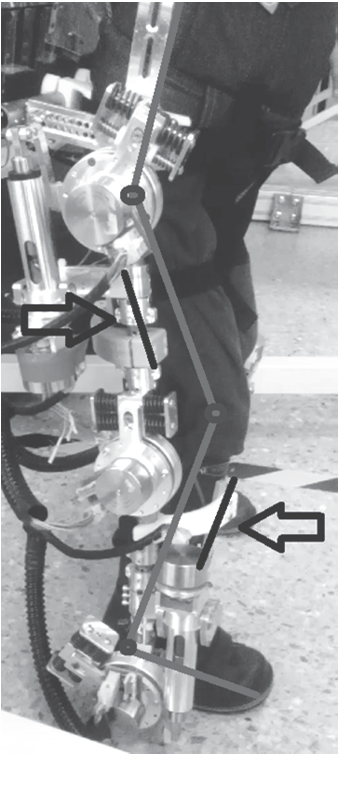
人体工程学是最重要的之一我们设计的部件。为了实现良好的步态模式并避免对患者造成伤害,外骨骼的耦合必须符合人体工程学。本文所描述的设计已实现了这一目标。此外,大多数目标使用者普遍存在肌张力过低的症状,这意味着使用者容易从外骨骼的正常支撑中滑脱。为了解决这一问题,外骨骼的固定采用了商用背带、腿部支撑和矫形鞋。
腿部支撑部件分别位于胫骨前方和股骨后方。这样,支撑部件有助于保持使用者站立,背带则将躯干固定在正确位置。鞋子通过特殊握柄直接连接到外骨骼上。图10显示了符合人体工程学的使用者与外骨骼的连接方式。
4. 平衡控制
该外骨骼设计用于实时稳定性控制。为实现良好稳定性的关键设计选择包括自由度数量、冠状面驱动器的配置、所选的结构几何形状,以及整体结构的均匀重量分布。平衡控制中的另一个决定性参数是电子速度控制,其周期已缩短至最小,从而提高了执行器的响应速度,并防止外骨骼跌倒。
用于控制平衡关键参数的传感器包括鞋底的两个压力鞋垫和惯性测量单元(IMU)。除了持续计算质心位置外,该外骨骼还可采用专门针对平衡控制设计的算法。这些平衡控制方法的具体描述不在本文范围内,将在未来的出版物中详细说明。
5. 结论和未来工作
一种创新的外骨骼设计,专注于适应儿童生长和脊髓性肌萎缩症患者的人体工程学需求,已被提出。该设计采用了允许完全移动性的10自由度配置。
已证明,所提出的结构能够轻松适应不同尺寸,同时满足性能目标。
ATLAS 2020外骨骼设计中还考虑了在行走过程中实现主动平衡的能力。
由于外骨骼的小型化会增加部件之间的碰撞风险,因此该组件的设计面临诸多挑战。研究表明,人体工程学是实现ATLAS 2020外骨骼正常步态控制最关键的环节之一。已确定平衡控制算法需要快速电子器件来控制执行器,防止外骨骼跌倒。
未来工作重点在于改进机械设计、开展节能研究、开发动态平衡控制以及增加被动安全机制。

















 30
30

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









