



 本文介绍了机器视觉系统需求分析的重要性,重点关注分辨率估算的步骤。通过计算相机像素精度和单方向视野范围,可以确定相机所需的分辨率。例如,如果视野5mm,理论精度0.02mm,那么单方向分辨率需求为250,实际应用中会选择更高倍数,如130万像素相机。选定分辨率后,再依据相机参数选择合适的镜头。
本文介绍了机器视觉系统需求分析的重要性,重点关注分辨率估算的步骤。通过计算相机像素精度和单方向视野范围,可以确定相机所需的分辨率。例如,如果视野5mm,理论精度0.02mm,那么单方向分辨率需求为250,实际应用中会选择更高倍数,如130万像素相机。选定分辨率后,再依据相机参数选择合适的镜头。
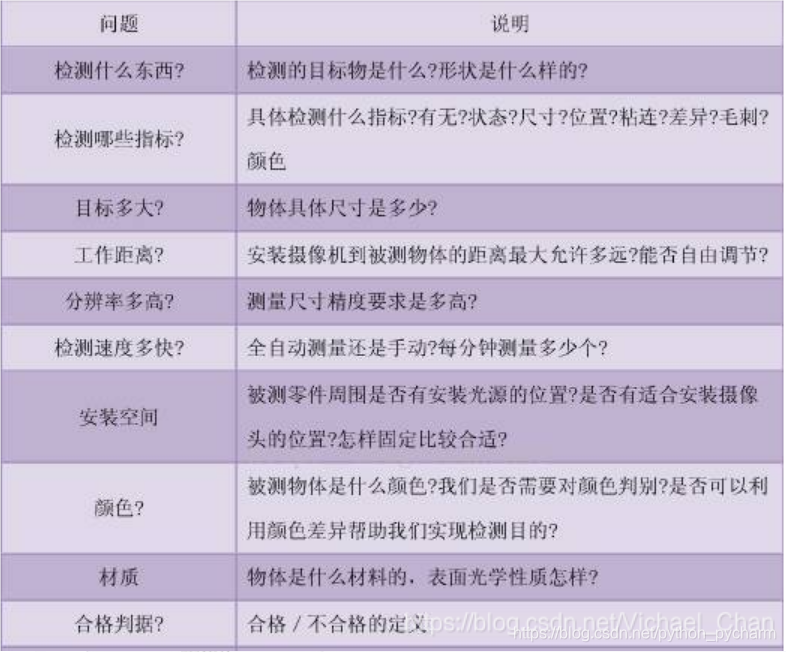
1.需求分析:
描述机器视觉系统需要完成的功能和工作环境,对于整个机器视觉系统的成功集成是至关重要,即设定工作目标。
1.分辨率估算:相机每次采集图像的像素点数,一般对应于光电传感器靶面排列的像元数:(面阵相机的分辨率有795×596,1024×1024,2048×2048,5320×5320等)
首先考虑待观察或待测量物体的精度,根据精度选择分辨率:
由:
相机像素精度 = 单方向视野范围大小/相机单方向分辨率。
得:
相机单方向分辨率 = 单方向视野范围大小/理论精度。
又 相机分辨率=感光芯片尺寸/像元尺寸,即:
根据实际应用即可选出恰当的 传感器尺寸(靶面尺寸)
例:若单视野为5mm长,理论精度为0.02mm,则单方向分辨率=5/0.02=250。然而为增加系统稳定性,不会只用一个像素单位对应一个测量/观察精度值,一般可以选择倍数4或更高。这样该相机需求单方向分辨率为1000,选用130万像素已经足够。
2.分辨率的确定:根据待测物体的尺寸估算出视野的大小,再结合检测精度,利用上面的公式就可以大概确定检测系统的工业相机的分辨率。
相机分辨率确认之后,再根据相机的参数,选择对应的镜头即可。
其他内容参考:https://blog.youkuaiyun.com/Vichael_Chan/article/details/98093950

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









