



1.采集数据集
根据day5(下)的代码采集了一组数据集,共有6个动作。最后一个动作我做了调整,因为tello摄像头的分辨率较低,动作6和动作2有可能会识别混乱。
2.数据标注
用那个著名的数据标注软件
3.训练自己的yolov5模型
进入yolo文件 进入data
进入coco128复制一份,改成自己的名字
用vs or pycharm打开
path:#数据相对于yolov5那个文件所在的目录
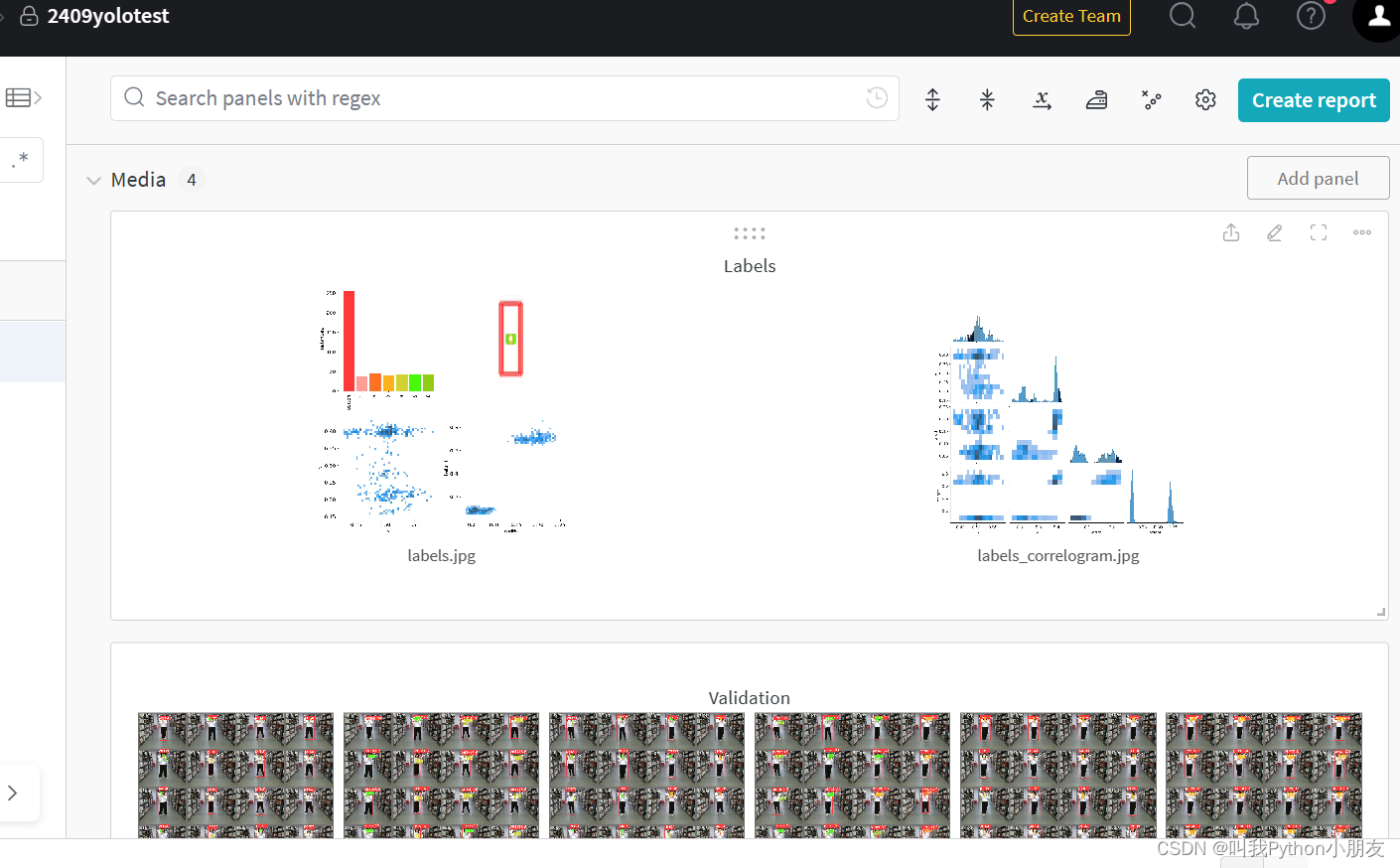
最后训练的结果大概就是这个样子的
4.遇到的问题
ConnectionAbortedError: [WinError 10053] 你的主机中的软件中止了一个已建立的连接。
解决方法参见
5.后续工作备忘
把自己的数据集训练的模型复制一份到课程附件里的模型中


















 632
632





 到【灌水乐园】发言
到【灌水乐园】发言







