







标题 IMU Misalignment
X = Gyro;
Y = 转台激励信号(N为转台不同位置和速率点的组合数量)
X和Y维度相同(N×4矩阵<包含bias>)
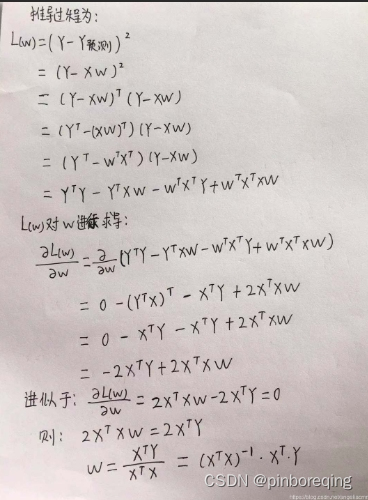
线性变换: H = inv(X’ * X) * X’ * Y;
X_Corrected = X * H;
error = Y - X_Corrected
公式解释:
线性变换包含了Misalignment 、scale 和 offset
线性变换H:
H = inv(X' * X) * X' * Y;
X_Corrected = X * H; % 维数:X_Corrected :N*3 H:4*3
[ H00 H01 H02 ]
H = [ H10 H11 H12 ]
[ H20 H21 H22 ]
[ H30 H31 H32 ]
% 转台标定参数维数: Misalignment:3×3 Scale 3×3 Bias 3×1
Misalignment matrix:
[ 1 -mis_yz mis_zy ]
M = [ mis_xz 1 -mis_zx ]
[ -mis_xy mis_yx 1 ]
Scale matrix:
[ s_x 0 0 ]
K = [ 0 s_y 0 ]
[ 0 0 s_z ]
Bias vector:
B = [ b_x b_y b_z ]
转台标定补偿公式:
X_vector = (X - B) * K * M = X * K * M - B * K * M
公式 Y_N×3 = X_N×4 * H_4×3 解析:
[T]
H = [ ]
[B]
[ T00 T01 T02 ]
T = [ T10 T11 T12 ]
[ T20 T21 T22 ]
B = [ H30 H31 H32 ]
[T]
Y_N×3 = [ X_N×3 E] * [ ] % E = [1 1 ... 1] N×1维
[B]
= X_N×3 * T + B_N×3
所以,
[ s_x -mis_yz*s_x mis_zy*s_x ]
T = K * M = [ mis_xz*s_y s_y -mis_zx*s_y ]
[ -mis_xy*s_z mis_yx*s_z s_z ]
[ s_x*s_x 0 0 ]
T * T' = K * M * M' * K' = [ 0 s_y*s_y 0 ]
[ 0 0 s_z*s_z ]
%因为三个轴是符合笛卡尔坐标系,所以T为正交矩阵
[ T00^2 + T01^2 + T02^2 0 0 ]
T * T' = [ 0 T10^2 + T11^2 + T12^2 0 ]
[ 0 0 T20^2 + T21^2 + T22^2 ]
如此便可以求出:Scale [s_x s_y s_z], 然后根据T和sclae便可以求出 Misal

















 4545
4545

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









