




 提出一种基于生成对抗网络的点云上采样方法PUGAN,该方法能够直接处理激光雷达扫描数据,提升点云的均匀性和靠近曲面性,并改善三维重建的质量。在多个数据集上验证了其优越性。
提出一种基于生成对抗网络的点云上采样方法PUGAN,该方法能够直接处理激光雷达扫描数据,提升点云的均匀性和靠近曲面性,并改善三维重建的质量。在多个数据集上验证了其优越性。
本文方法可以直接对激光雷达的scan数据进行上采样以及数据修正,得到的结果更加完整、均匀:

本文在合成数据集以及真实数据集上进行了测试,在上采样点云的均匀性、靠近曲面性(生成的点云要更加接近表面)、三维重建质量三个方面超越了现有方法。
相关工作
现有点云上采样的方法有三种:
1. 基于优化的方法
这些方法都不是以数据为驱动的,它们严重依赖于先验知识,如光滑曲面的消耗、法向估计等
2. 基于深度学习的方法
点云上采样与点云补全(point completion)不同,前者是提高点云在局部patch中的均匀性,而后者根据点云的部分输入生成完整的目标。一般使用现有的点云特征提取网络(pointnet, pointnet++, DGCNN)等提取特征,然后进行上采样。
3. 生成对抗网络 GAN
已经有一些工作使用GAN对点云进行形状补全、三维目标生成等,本文是首个使用生成对抗网络进行点云上采样预测的工作
PU GAN
基于生成对抗网络:生成器对输入的N个点云进行上采样, 输出rN个点。鉴别器对这rN个点进行判别,输出置信度。
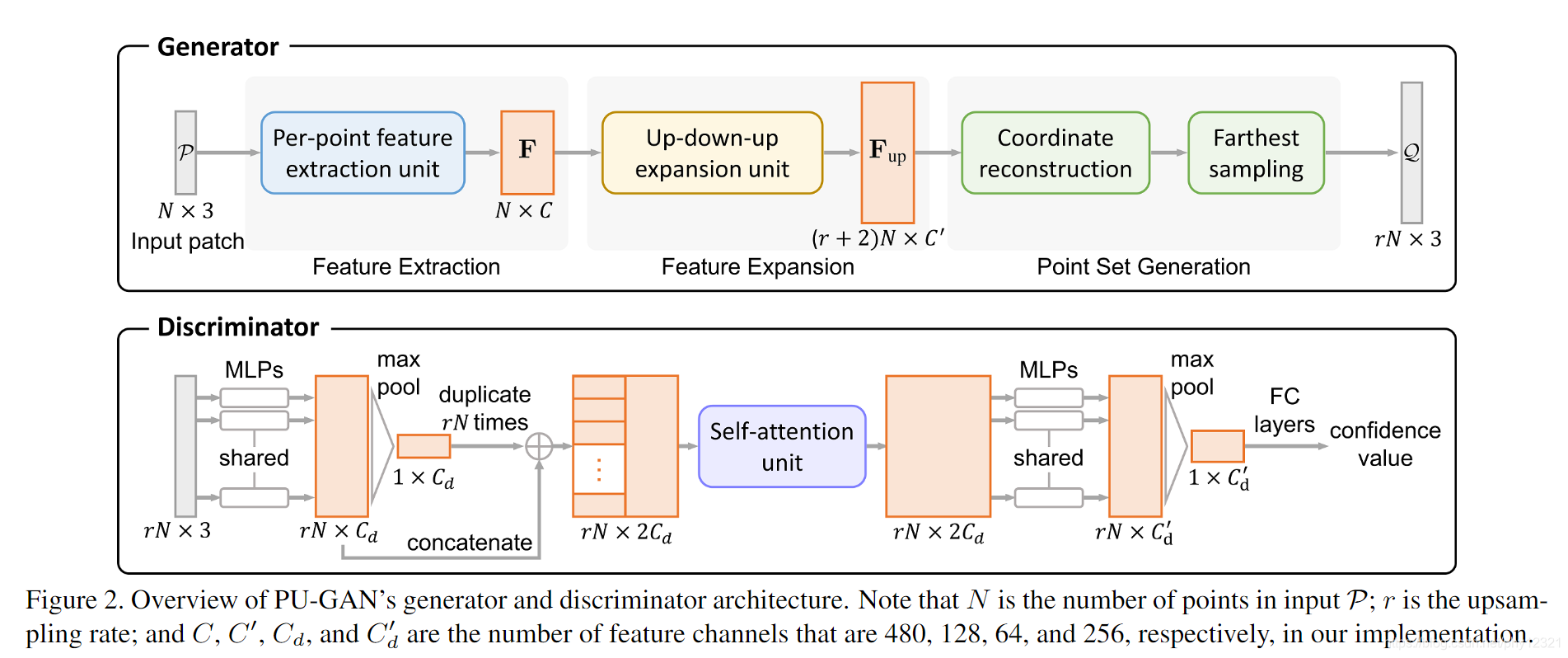
1. 生成器 Generator
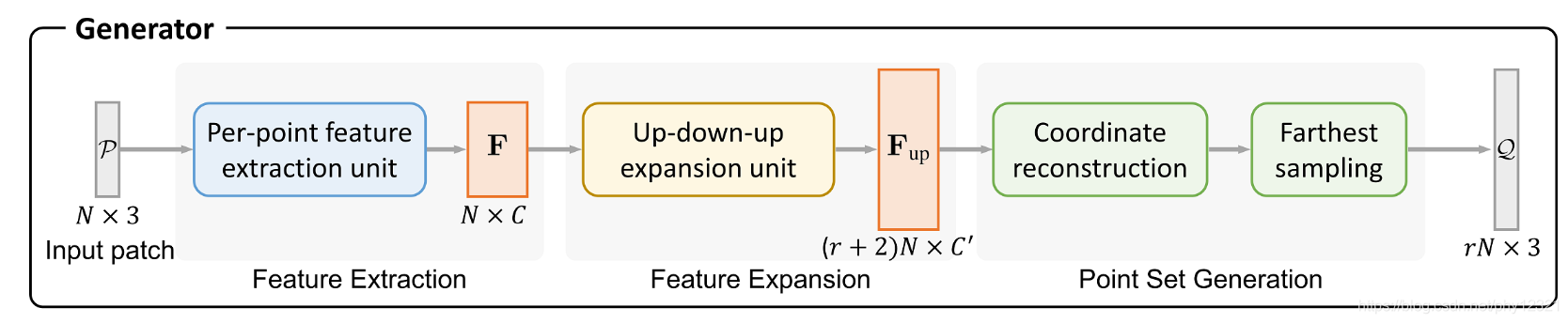
输入点云 p : N ∗ d p : N * d p:N∗d, 这里d=3, 只考虑点云的xyz坐标
The feature extraction component:
点云特征提取模块与论文《Patch-based progressive 3D point set upsampling.》相同, 论文没有详细说明。
该模块输出为点云特征F。
The feature expansion component:
讲特征F扩展为 F u p F_{up} Fup, 为了使扩展的特征更加多样化,作者提出了一个up-down-up unit 进行特征扩展:
具体结构:上采样-下采样-上采样 + skip connections
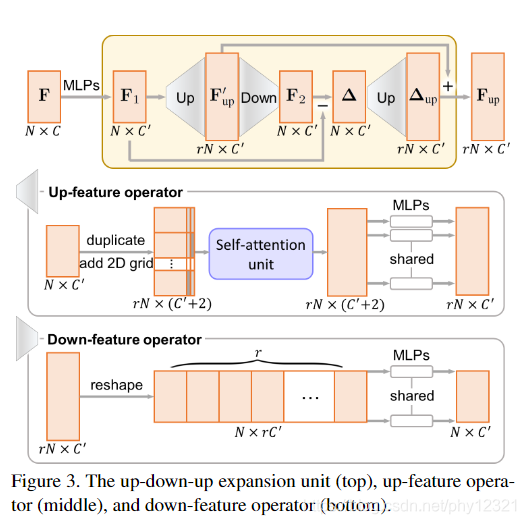
up-feature-operator中的2D-grid是借鉴FoldingNet中的2D网格机制:在对输入的点云特征复制了r次之后,对r份中的每一份点云生成一份单独的2D向量,,将其加入到对应的点云特征中去。这个步骤到达了讲复制的点云分散开的效果,使得点云更加分散、均匀。
图中的self-attention unit 是一个基于注意力模型的特征提取单元,后面鉴别器中也会用到,具体结构:
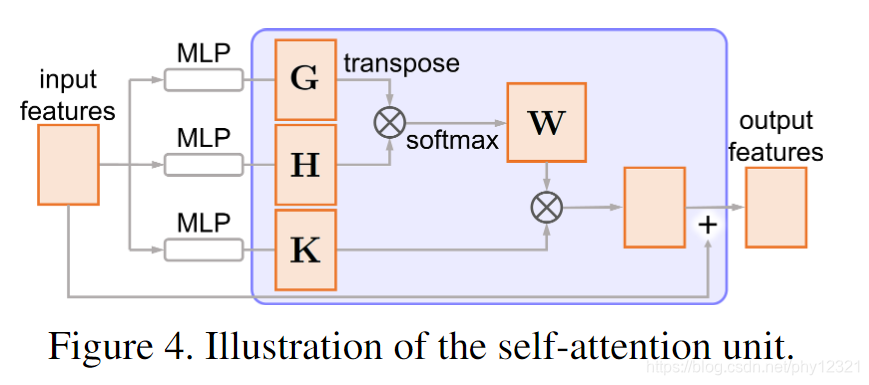
W = f softmax ( G T H ) F = W T K \mathbf{W}=f_{\text {softmax }}\left(\mathbf{G}^{T} \mathbf{H}\right) \\ \mathbf{F} =\mathbf{W}^T\mathbf{K} W=fsoftmax (GTH)F=WTK
The point set generation component:
首先通过一组多层感知器(mlp)从 F u p F_{up} Fup中回归出一组3D坐标。由于点云特征扩展本质上还是局部进行的, 因此回归出的点集依然更加靠近输入点云。为了提高点云的均匀性,对生成的点集进行最远点采样得到rN个点(因此回归出的点云比rN更多,其实是(r+2)N个)。
2. 判别器 Discriminator

输入: 经过上采样后的点云
首先采用论文《PCN:Point completion network.》中的骨干网络对输入的点云进行全局特征提取。该网络有效地结合了局部和全局信息,并确保了网络足够轻量。在特征concat之后,使用一个self-attention unit 对特征进行进一步提取。
最后使用MLPs+FC的网络层得到预测的置信度,若接近1, 鉴别器则认为是来自于真实点云。
3. Patch-based End-to-end Training
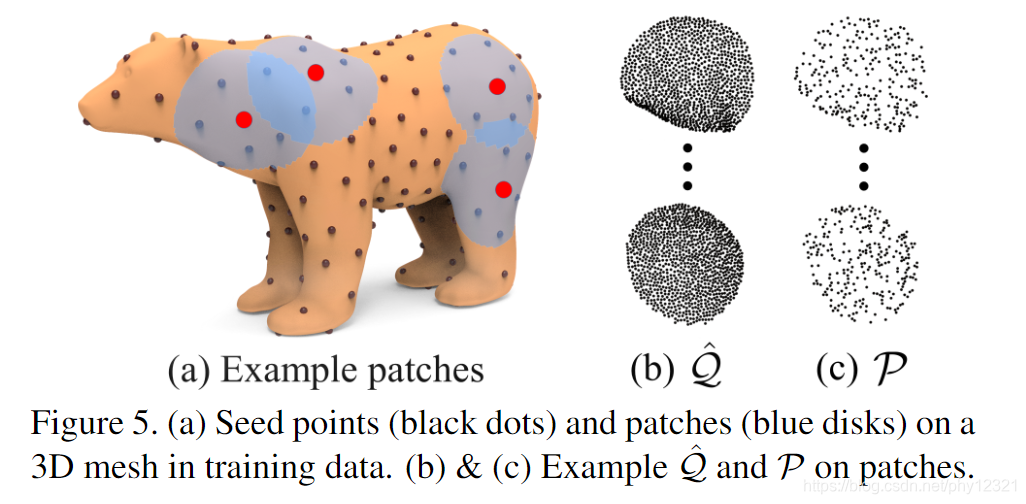
首先在一个mesh表面上随机生成200个采样点。
以每个采样点为中心进行泊松圆盘采样,每个圆盘 Q ′ Q' Q′就是一个patch, 包含rN个点云,作为target point。
训练时对 Q ′ Q' Q′中的rN个点进行采样得到N个点P,作为网络的输入。
4. 损失函数
Adversarial loss
L g a n ( G ) = 1 2 [ D ( Q ) − 1 ] 2 and L g a n ( D ) = 1 2 [ D ( Q ) 2 + ( D ( Q ^ ) − 1 ) 2 ] \begin{aligned} \mathcal{L}_{\mathrm{gan}}(G) &=\frac{1}{2}[D(\mathcal{Q})-1]^{2} \\ \text { and } \mathcal{L}_{\mathrm{gan}}(D) &=\frac{1}{2}\left[D(\mathcal{Q})^{2}+(D(\hat{\mathcal{Q}})-1)^{2}\right] \end{aligned} L
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 36万+
36万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









