






IEEE ROBOTICS AND AUTOMATION LETTERS, 2020

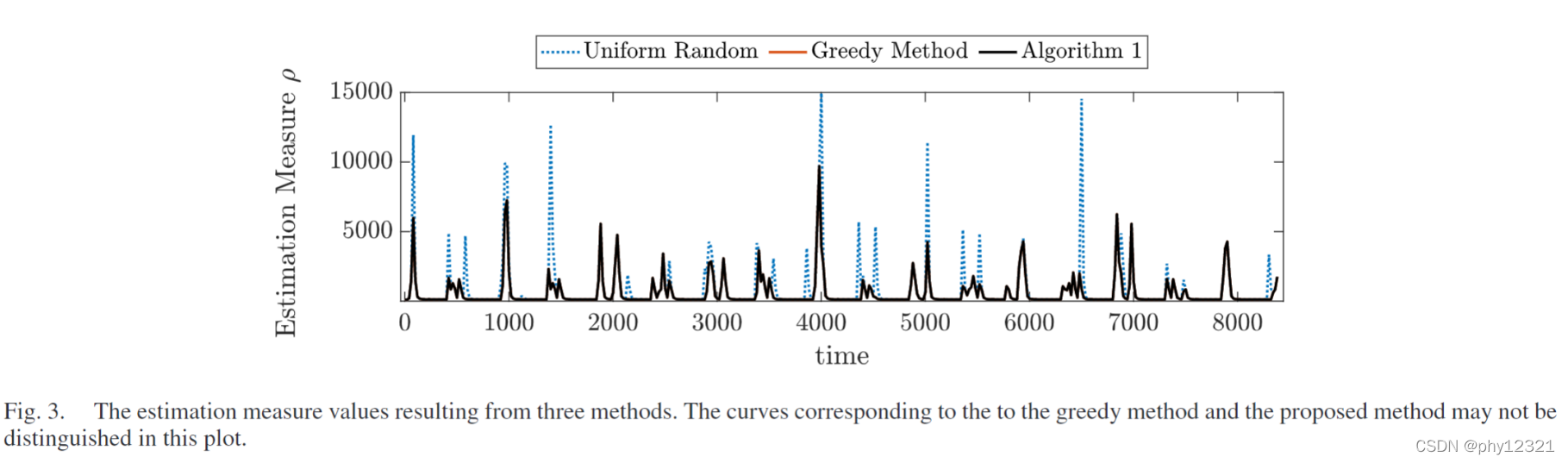
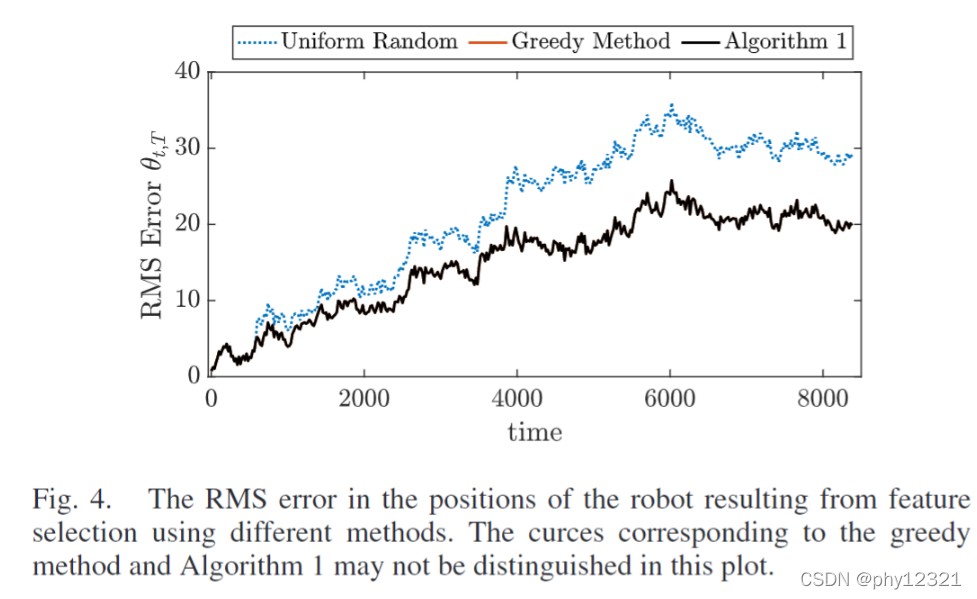
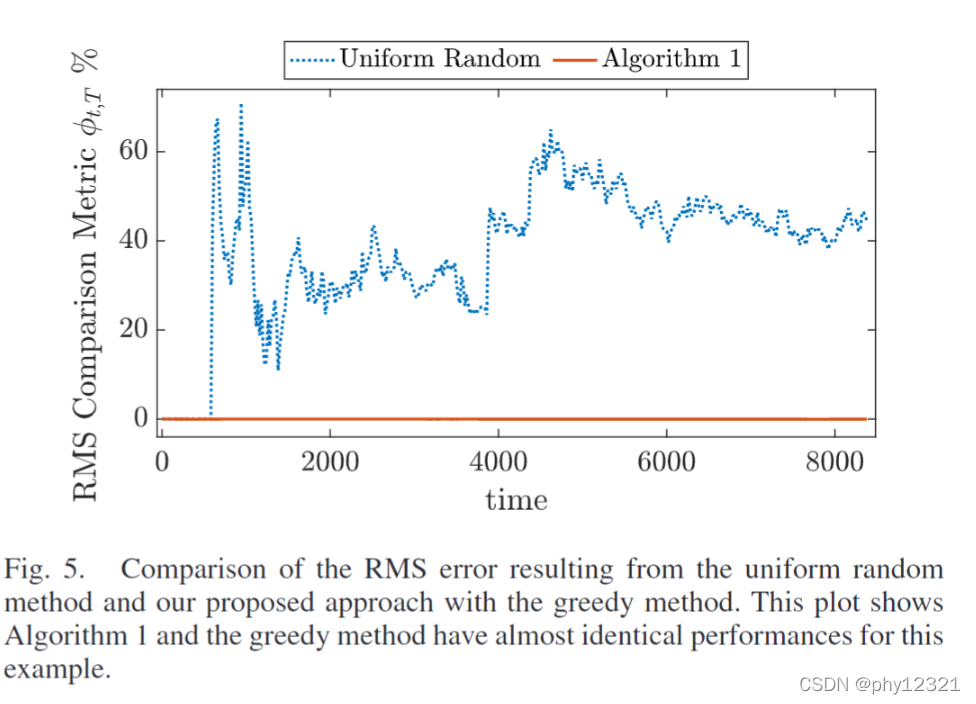
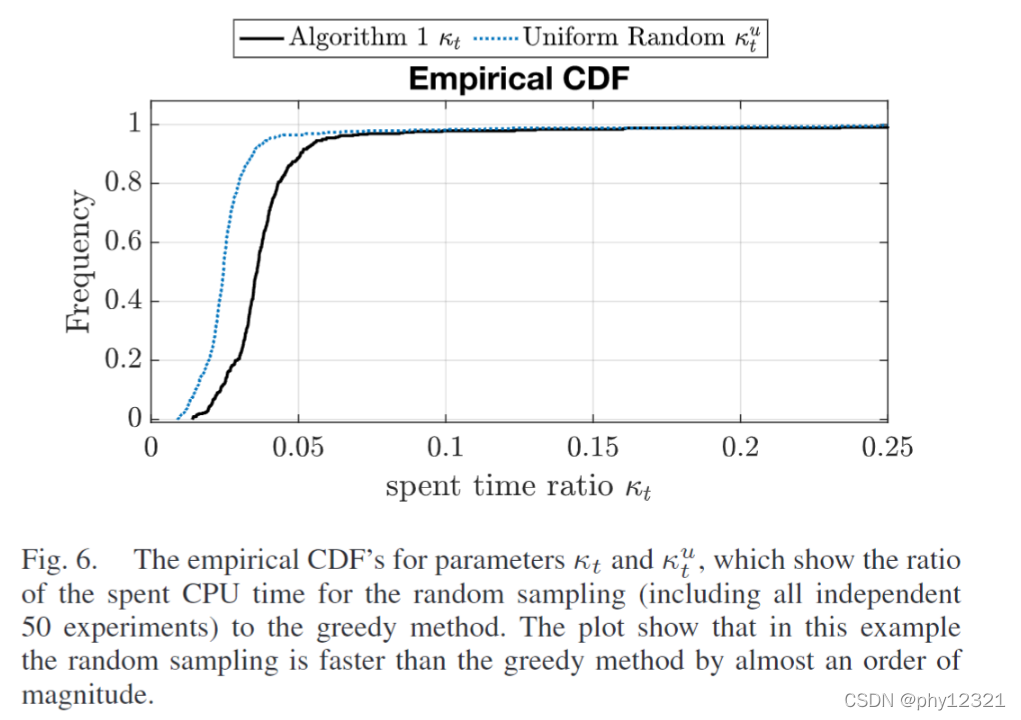
本文方法与基于贪心算法的特征选择方案性能相近,但是其时间复杂度为线性,而贪心算法时间复杂度O(n2),对于特征数目较多,成百上千的情况,本文算法能够实时。
 该文提出的方法在性能上接近贪心算法的特征选择方案,但拥有更低的时间复杂度——线性时间,尤其适用于特征数量庞大的情况,能实现高效实时处理。
该文提出的方法在性能上接近贪心算法的特征选择方案,但拥有更低的时间复杂度——线性时间,尤其适用于特征数量庞大的情况,能实现高效实时处理。
IEEE ROBOTICS AND AUTOMATION LETTERS, 2020
本文方法与基于贪心算法的特征选择方案性能相近,但是其时间复杂度为线性,而贪心算法时间复杂度O(n2),对于特征数目较多,成百上千的情况,本文算法能够实时。
 7524
6792
5714
5665
4498
7524
6792
5714
5665
4498

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























