







 超级会员免费看
超级会员免费看
 本文详细介绍了ESP-IDF编译系统的工程文件结构,包括组件(components)、入口程序(main)、配置文件(sdkconfig)、编译目录(build)和分区表(partitions.csv)。ESP-IDF组件是模块化的代码,可以设置编译参数和依赖关系。main目录包含项目源代码和入口点,而sdkconfig文件存储所有组件的配置参数。build目录用于存放编译结果,分区表用于分配Flash空间。开发者可以通过idf.py命令进行编译、烧录和清理操作。
本文详细介绍了ESP-IDF编译系统的工程文件结构,包括组件(components)、入口程序(main)、配置文件(sdkconfig)、编译目录(build)和分区表(partitions.csv)。ESP-IDF组件是模块化的代码,可以设置编译参数和依赖关系。main目录包含项目源代码和入口点,而sdkconfig文件存储所有组件的配置参数。build目录用于存放编译结果,分区表用于分配Flash空间。开发者可以通过idf.py命令进行编译、烧录和清理操作。
接前一篇文章:ESP-IDF编译系统详解(1)
本文内容主要参考:
《ESP32-C3物联网工程开发实战》 —— 乐鑫科技 编著
特此致谢!
2. 工程文件结构
工程(Project,也称为项目)是指一个包含入口函数main、用户自定义组件,以及构建可执行应用程序所需的编译脚本、配置文件、分区表等文件的文件夹。工程可以被复制和传递,并可在安装了相同版本ESP-IDF开发环境的机器中编译生成相同的可执行文件。
笔者之前建立的VSCODE+ESP-IDF的工程结构如下所示:
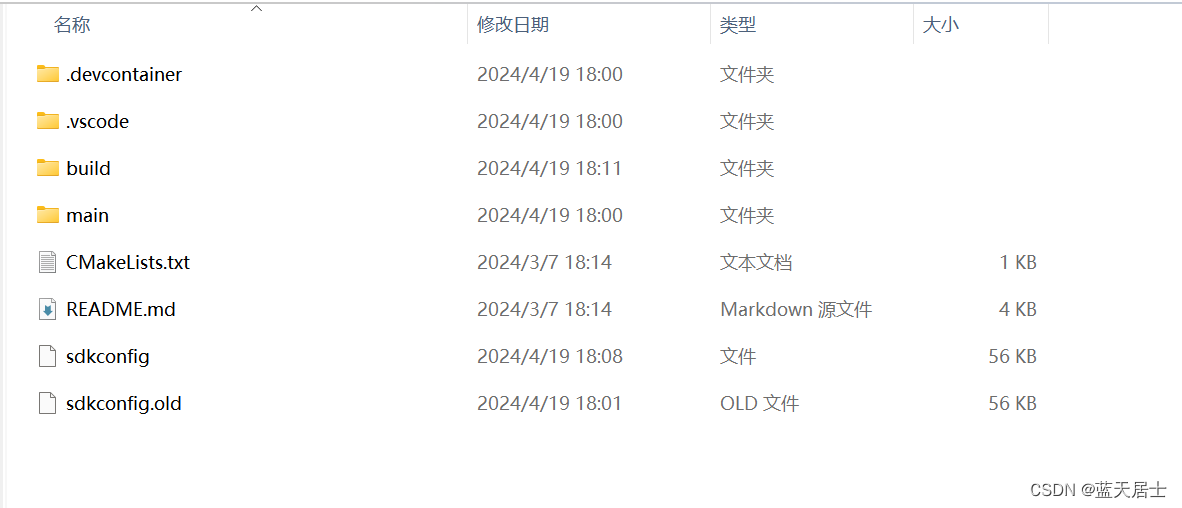
(1)组件(components)
组件是模块化且独立的代码,在编译系统中以文件夹的形式管理(文件夹名默认为组件名)。经过组件的编译脚本,可以指定其编译参数和依赖关系。在编译时,组件会被编译成独立的静态库(.a)文件,最终在链接阶段共同组成应用程序。
ESP-IDF的关键功能(如操作系统、外设驱动、网络协议栈等)是以组件的形式提供的,这些组件保存在ESP-IDF根目录下的components目录中。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 2053
2053

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











