



在上一个文章中,我展示了电机直连鲍登线的pid控制思路
在反复调整之后,得出以下结论
1、线管产生对拉力的影响是时变非线性的;
2、在传统pid的调节过程中,可以在阶跃函数输入下,会有较为理想的为稳态误差,但是实时性较差;
3、无法对人类行走的频率的sin函数进行跟踪
总结:响应太慢(根据调好的pid来看,电流的增加主要是通过积分部分作用,因此无可避免的具有较大的滞后性)
和朋友进行了初步的讨论:
方向有以下两个:
1、分段pid ,或者非线性pid(主要是p)
2、ADRC
目前根据使用情况,先对pid进行了部分的分段
效果如下:
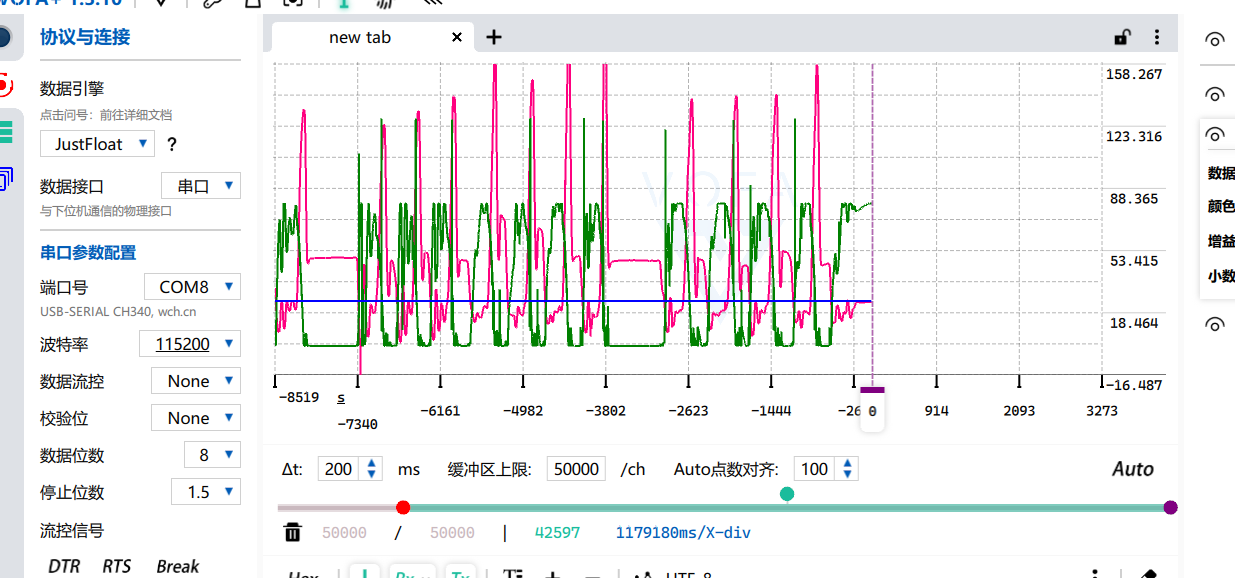
图中是关节反复运动过程中设定为恒力的条件下 采用分段pid的效果
简述分段思路:
在关节助力过程中,尤其是下肢关节助力中,需要避免的一件事是突然助力减小,这种突变很容易导致摔倒。但是当电机跟随拉线运动过程中,如果拉线收缩,电机本身回缩过程中,如果电流恒定,则大部分电流将用于加速电机本身。上述运动会产生电流突然减小的效果,因此我的第一步分段思路是当error_f小于0,即拉力突然小于设定力的时候,对应人站起来的过程,此时p和d都很大,力争尽快减小的拉力提升上去,但是当,即拉力突然大于设定力的时候,对应人慢慢弯腰的过程,此时p和d都很小,因为弯腰过程中拉力会突然增加,避免拉力超调下降太小,造成使用人员的失稳,因此此时并不追求极快的跟随效果,而是慢慢的降低。具体效果如图。后续我会更新使用更复杂的pid如模糊pid和ADRC算法的效果

















 152
152

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









