 ROS话题通信模式详解
ROS话题通信模式详解




话题通信是ROS(Robot Operating System,机器人操作系统)中使用频率最高的一种通信模式,其实现模型主要基于发布/订阅模式。
一、基本概念
话题通信模型中涉及三个主要角色:
- ROS Master(管理者):负责保管发布者(Talker)和订阅者(Listener)注册的信息,并匹配话题相同的Talker与Listener,帮助它们建立连接。
- Talker(发布者):负责发布消息到特定的话题上。
- Listener(订阅者):负责订阅特定话题上的消息,并处理这些消息。
二、实现流程
话题通信的实现流程通常包括以下几个步骤:
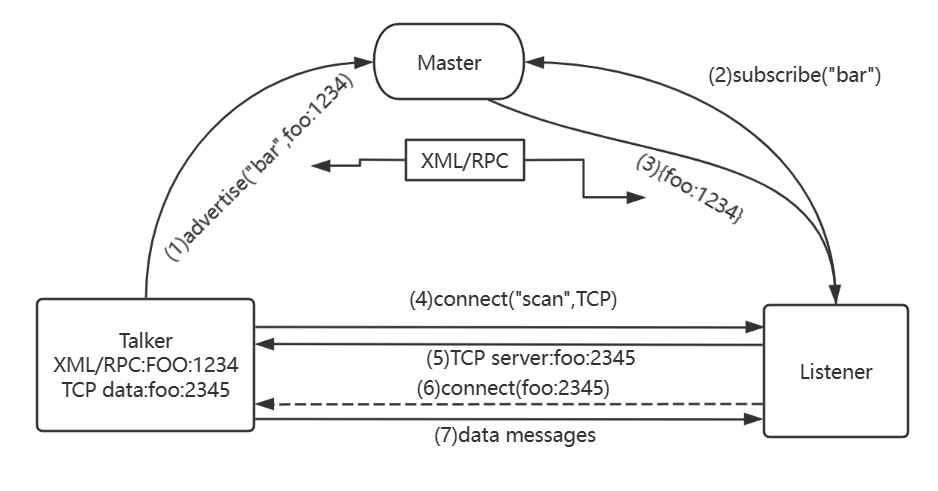
- Talker注册:Talker启动后,会通过RPC(远程过程调用)地址在ROS Master中注册自身信息,包含所发布消息的话题名称。ROS Master会将节点的注册信息加入到注册表中。
- Listener注册:Listener启动后,也会通过RPC在ROS Master中注册自身信息,包含需要订阅消息的话题名。ROS Master同样会将节点的注册信息加入到注册表中。
- 信息匹配:ROS Master会根据注册表中的信息匹配Talker和Listener。如果Talker和Listener的话题一致,ROS Master就会向Listener发送Talker的RPC地址信息。
- 连接请求:Listener根据接收到的RPC地址,通过RPC向Talker发送连接请求,进行远程访问,传输订阅的话题名称、消息类型以及通信协议(如TCP/UDP)。
- 确认连接:Talker接收到Listener的请求后,通过RPC向Listener确认连接信息,并发送自身的TCP地址信息。
- 建立连接:Listener根据Talker返回的消息使用TCP与Talker建立网络连接。
- 发布消息:连接建立后,Talker开始向Listener发布消息。
注意:
- 上述实现流程中,前五步使用的 RPC协议,最后两步使用的是 TCP 协议
- Talker 与 Listener 的启动无先后顺序要求
- Talker 与 Listener 都可以有多个
- Talker 与 Listener 连接建立后,不再需要 ROS Master。也即,即便关闭ROS Master,Talker 与 Listern 照常通信。
问题:为什么前五步使用的 RPC协议,最后两步使用的是 TCP 协议?
这种通信方式结合了RPC和TCP两种协议的优势。RPC协议用于在ROS Master中注册节点、匹配节点以及发送连接信息等操作,它简化了远程过程调用的复杂性。而TCP协议则用于实际的数据传输,它提供了可靠的、面向连接的通信服务,确保数据能够按顺序、无差错地传输到接收方。
三、关键特性
- 解耦合:发布者和订阅者之间不需要直接通信,它们通过ROS Master进行信息匹配和连接建立,实现了节点间的解耦合。
- 异步通信:话题通信是一种异步通信机制,发布者可以随时发布消息,订阅者也可以随时订阅并处理消息。
- 多对多关系:同一话题下可以存在多个发布者和多个订阅者,这意味着数据会出现交叉传输的情况。如果没有订阅者,数据传输可能会出现丢失的情况。
四、应用场景
话题通信适用于不断更新的、少逻辑处理的数据传输场景。例如,在机器人导航功能中,激光雷达会实时采集环境信息并发布到特定话题上,导航模块则订阅该话题并解析雷达数据以生成运动控制信息。类似地,摄像头、GPS等传感器数据的采集也都使用了话题通信。
综上所述,话题通信实现模型通过ROS Master、发布者和订阅者三个角色的协同工作,实现了节点间的异步通信和数据传输。这种通信模式具有解耦合、异步通信和多对多关系等关键特性,适用于不断更新的数据传输相关的应用场景。

















 932
932

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









