



一种用于量化模拟驾驶环境中压力的动态混合选择模型
摘要
本文构建了一个由认知负荷引发的驾驶员压力的动态混合选择模型,并将其应用于在贝鲁特美国大学学生中开展的驾驶模拟器实验。该模型将一个量化随时间变化的状态压力的潜在或不可观察变量与闯红灯行为的离散选择模型相结合。驾驶员状态压力由城市驾驶环境中的额外认知负荷和情境因素引起,并依赖于时不变个体效应或个体特质。驾驶表现(如速度和加速度)和生理指标(如心率)被用作潜在状态压力的指标。研究发现,驾驶员状态压力显著受到道路事件或情境(如遇到行人、卡车和交通信号灯)、认知负荷水平、个体的压力倾向以及基本驾驶任务(如维持车辆控制)的影响。此外,结果表明,随着压力增加,存在一种调节性驾驶行为的模式。所开发的模型是对驾驶员压力的交互模型的数学化概念表达,可集成到车载系统中,用于检测或预测驾驶员状态,从而提升安全性和福祉。
索引术语 —驾驶员压力,驾驶模拟器,混合选择模型,生理指标,调节行为,状态检测。
一、引言
DRIVING 驾驶表现与驾驶过程中的唤醒水平相关。当唤醒水平与驾驶任务需求之间达到平衡时,驾驶表现质量最佳;而唤醒不足(注意力不集中、疲劳)和过度唤醒(压力)均会导致驾驶质量下降。这种关系由一条被称为耶克斯‐多德森定律的倒U型曲线表示[1]–[6]。
由于工作负荷与唤醒水平具有相似的结构,Yerkes‐Dodson定律已被调整应用于“健康概念”,通过将工作负荷与绩效质量相关联[4]–[6]。
因此,当投入适当的工作负荷以实现安全驾驶时,可达到最佳驾驶表现;这种状态出现在描述表现与工作负荷关系的倒U型曲线所形成的中间区域。另一方面,频谱的两端均表现为驾驶表现质量下降,并与道路交通事故相关[7]。
这些关键水平包括:(a)负荷不足(极低工作负荷),对应于疲劳和困倦;(b)超负荷(极高工作负荷),对应于过度分心,从而引发高水平的压力。这种负面类型的压力被称为“痛苦(负面压力)”[8]–[12],并导致挫败感和攻击性等情绪波动[13]。
当驾驶员无法恰当地应对驾驶任务的需求时,就会产生压力,这种压力源于身体或认知上所需付出的努力增加。由于担心不能及时成功完成当前任务以及害怕犯错,从而产生焦虑,进而引发压力[14]。因此,在驾驶过程中进行使用手机、与乘客交谈以及操作车载系统等作为次要任务的分散注意力的活动,都会引起压力[15]。在思考诸如个人、财务和工作问题等生活事件时,注意力从主要驾驶任务上转移,也会增加驾驶员压力[16],[17]。
其他因素也会导致驾驶员压力,包括驾驶条件和情境条件。驾驶主要任务要求驾驶员付出注意力需求,例如维持纵向和横向控制以及应对危险[11],[15],[16]。这些需求还取决于驾驶环境。例如,在高速公路行驶产生的压力水平低于城市驾驶[12],[18]。驾驶条件如低能见度、天气、雾、路况差和交通拥堵都会增加驾驶员压力[11],[15]。引发压力的其他因素与特质或个性特征有关,例如攻击性和厌恶驾驶。这些因素会影响驾驶员状态,并可能影响驾驶员对压力的脆弱性[11],[16],[17],[19]。因此,特定的道路事件或因素在不同个体之间可能不会引起相同的压力水平[20]。
尽管压力与工作负荷源自相对不同的概念,但它们通常被用于评估内部和外部需求对个体的影响,并描述个体的状态,尤其是在驾驶情境下[14],[21]。我们强调,从心理学角度来看,压力与工作负荷均反映了个体与需求以及应对这些需求时可用的资源。工作负荷将可用资源描述为满足特定任务要求的处理能力,而压力作为一种状态,其概念更为广泛,涵盖了任务需求以及整个工作环境[22]的影响。因此,在驾驶情境中,当道路事件或状况发生时,在驾驶过程中执行次要任务(这会增加工作负荷,即需要投入更多资源)可能会产生压力。换句话说,压力可能由任务本身(额外的工作负荷)以及包括道路事件/状况在内的驾驶环境风险增加所引起。
A. 背景
参考文献[11]回顾并概述了一个基于[23]所提出方法的驾驶压力与疲劳的交互模型。该模型认为,个体与驾驶环境之间由对外部指令的感知所推动的动态交互会产生压力。该模型还区分了控制“状态压力”的情境性应激源和定义“特质压力”的个性特征。例如,高水平的工作负荷被视为一种环境压力因素,而攻击性、易疲劳倾向以及厌恶驾驶则被视为影响对压力易感性的个体特征或特质。
针对这些因素,驾驶行为受到“评估过程”的影响,该过程代表对压力影响的个人评估和耐受性;同时也受到“应对过程”的影响,该过程决定了管理和应对感知压力所需的策略和行动。因此,这两个认知过程体现在主观结果中,如愤怒、担忧和紧张,以及表现结果中,如控制能力下降和速度变化[11]。
[24]的作者开发了一种基于贝叶斯网络的实时检测驾驶员压力的方法。数据包括生理指标(心电图、皮肤电活动和呼吸),并结合了对驾驶环境的评估。该评估由全球定位系统(GPS)、车辆的控制器局域网(CAN)以及以往驾驶行为记录提供。在真实驾驶条件下的压力事件包括超车、紧急制动,以及其他如交叉路口和道路上的行人等事件。所构建的模型通过将上述事件表示为引起压力(效应)的原因,并将该压力与生理指标的变化相关联,从而区分驾驶员压力与增加的工作负荷。
参考文献[25]使用模式分类算法对三次模拟驾驶会话进行分类,包括:(1)在高速公路上正常稳定驾驶,(2)驾驶过程中引入不可预测的机械刺激以产生侧滑,模拟阵风效应,(3)在承受侧滑的同时,进行需及时完成的数学运算,从而增加认知负荷的驾驶。第二和第三会话旨在提高驾驶员的压力水平。该研究的目的是解释自主神经系统和驾驶风格在压力逐渐增加的条件下如何变化。为了回答这一问题,对每位参与者在三次模拟驾驶会话期间的心率变异性、呼吸活动和皮电反应等生理指标进行了监测。驾驶表现也通过速度变化、方向盘转角修正以及反应时间进行分析。结果表明,三次模拟驾驶会话在统计学上存在显著差异,并导致压力水平上升。
在[26]中采用了机器学习技术,用于根据当前压力水平、驾驶行为和道路曲率预测未来的压力水平。通过心率变异性评估压力水平在驾驶员生理状态中的反映情况。同时利用车辆遥测数据和GPS数据监控驾驶行为。速度和加速度相关指标被作为输入变量纳入模型中。
在[27]中使用了二分类模型(支持向量机)来对驾驶员在三种不同模拟驾驶条件(城市、高速公路和乡村)下所经历的压力水平(有压力或无压力)进行分类。压力预测基于从方向盘移动中提取的特征,方向盘移动通过可穿戴式手套传感器进行测量。压力水平通过皮肤电导和驾驶员的自我报告来测量。
文献[28]开发了一个联合选择与潜变量模型框架,用于分析作为潜在变量的压力对跟车决策(即加速和减速决策)的影响。压力通过心率、血容量脉搏和皮肤电导进行测量,并在高速公路环境下的驾驶模拟器实验中,通过涉及激进的周围车辆、慢速前车和时间压力的情景加以操控。研究发现,随着压力增加,驾驶员更倾向于加速,且该效应显著。
表I总结了这些相关研究,并将我们的研究置于相应背景下。上述大多数研究关注压力检测/分类(使用二元或离散类别),主要采用机器学习方法。众所周知,机器学习方法通常缺乏可解释性,难以推断因果关系。在本文中,我们提出了一种不同的方法论方法来检测和预测压力,该方法具有行为基础,能够在动态情境下利用结构方程模型和离散选择模型对因果关系进行建模。这种被称为混合选择建模的方法是一种计量经济学框架,它将不可观察或潜在变量(即通过模型推断出的变量)如压力的成因及其表现形式的建模,与离散选择项之间的选择分析相结合。
尽管这种方法在分类准确率方面通常可能低于机器学习方法,但它不仅能回答驾驶员是否处于压力状态,还能回答其压力程度(在连续水平上)以及各个因素对压力的影响程度。
因此,本研究采用更为精细的概念化方法,将压力视为一个潜在变量,而不是像其他一些研究那样假设生理指标本身就是压力水平。在本文中,我们不仅进行分类,还进一步预测由此产生的压力水平对驾驶表现的影响,而大多数其他研究仅测量驾驶表现指标而非预测这些指标。在诸如交通微观仿真器之类的应用中,需要预测驾驶表现指标,这些仿真器基于驾驶行为模型来模拟每一秒的车辆轨迹(位置、速度、加速度),以评估网络性能。这类驾驶行为模型通常未考虑驾驶员状态。因此,我们的工作扩展了此类模型的行为真实性。尽管参考文献[28]也使用混合选择建模框架来量化压力,但该研究的重点是压力对加速与减速决策的效应。在本研究中,我们评估压力对速度、踏板踩下程度和反应时间的影响;通过道路事件和工作负荷两种方式操控压力;并针对一个不考虑压力的简单模型对我们的模型进行验证。
尽管将结构方程模型与离散选择模型相结合并非新方法,但据作者所知,将其应用于驾驶情境中进行驾驶员压力量化是全新的(除[28]外)。我们尚未发现其他研究在数学模型中实现了文献中广泛引用的驾驶员压力交易模型([11],[23],[29])(例如参见[30]–[34]),该模型考虑了影响驾驶员压力的各种因素。
在之前的研究[35]中,我们描述性地分析了工作负荷对驾驶表现和生理指标的效应;在本文中,我们开发了一种压力的预测模型。
除了在交通微观仿真器中具有潜在应用价值外,该模型还可能用于响应式驾驶情境,如下所述。本文研究的人群是18至28岁的年龄段的年轻驾驶员,特别是学生。以往研究表明,与年长驾驶员相比,年轻人在驾驶过程中更频繁地参与导致分心的任务,尤其是由车内活动和设备引起的分心[36]–[38]。尽管该模型框架可应用于任何驾驶情境,但在应用中我们重点关注“突发”类型的交通状况,而非更为普通或细微的交通状况。这一点对文中后续讨论的压力检测具有重要意义。
B. 检测/预测驾驶员状态的重要性
驾驶员状态代表了驾驶员的生理和功能状况,例如压力水平、认知负荷、分心和疲劳[4]。驾驶员状态的检测可以根据客观和主观的测量方法,例如驾驶表现、生理指标以及自我报告。特别是,高水平的工作负荷和压力会通过生理扰动项表现出来,例如驾驶员的心率、皮肤电导和呼吸频率的增加。监测这些指标为检测高水平的工作负荷和压力提供了客观工具[4],[12],[39]–[42]。将状态检测集成到车载系统中,可能对驾驶员的安全产生重要影响。
在此背景下,参考文献[43]根据干预类型对车载安全系统进行了分类:(1)伤害缓解/降低或被动安全(例如,安全气囊);(2)由系统实施自动响应提供的碰撞避免(例如,制动、车道校正),或通过向驾驶员发出警告以实施响应的碰撞避免(例如,碰撞预警)
车道偏离预警),以及(3)通过检测驾驶员状态并管理驾驶员工作负荷和福祉来提升驾驶表现和事故预防能力。
参考文献[4]讨论了检测驾驶员状态以提升驾驶员安全性和福祉的重要性,强调应将驾驶员视为“主动参与者”,其负责控制、操作车辆,并与整体环境变化进行交互。该文献还提出了一个集成车辆安全/健康系统的框架。一旦驾驶员状态被检测和监控,相关信息便可显示并提供给驾驶员、车辆系统以及智能交通系统(ITS)基础设施,以促进和支持针对驾驶情境的安全功能(例如提醒或安抚驾驶员)。驾驶员状态检测的人工智能应用表现为车辆能够“感知”环境和驾驶员状况,并采取便捷措施以最大化驾驶员的安全与福祉。例如,在自动驾驶电动汽车本田 NeuV中应用的“情感引擎”[44]即为此类案例。该车辆利用生理传感器和摄像头检测驾驶员的情绪。“车载网络助手”会向处于压力或攻击性状态的驾驶员推荐放松音乐并调整照明方案以促使其冷静;同时,车辆的动力可能会暂时降低,并将驾驶模式切换至自动驾驶模式,直至驾驶员恢复至福祉状态——即耶基斯‐多德森定律倒U型曲线中的最佳唤醒水平(如文章前文所述)[4],[6]。因此,车辆能够从驾驶员状态中“学习”并相应地接管控制权。
此外,在碰撞避免系统的设计中集成状态检测有助于提高事故发生可能性的可预测性。当前车辆碰撞避免系统中的碰撞预测仅基于来自周围交通环境传感器的数据,并根据风险估计算法生成干预措施。在更先进的系统中,通过行为和生理数据来检测或量化人体状态,并将其作为碰撞预测的输入[45]。
在此背景下,本研究开发了一种能够检测驾驶员状态(特别是驾驶员压力)的动态行为模型。文章其余部分组织如下:下一节介绍模型框架与公式化;随后是该模型在驾驶模拟器实验中的应用;最后讨论了本研究的贡献、所开发模型的技术应用、研究局限性以及未来方向。
II. 驾驶员压力的动态模型:框架与公式化
所提出的模型旨在基于驾驶员压力与疲劳的交互模型[11],[23]来量化驾驶员压力。该模型假设驾驶员所经历的状态压力是一种潜在(或不可观察,即由模型推断得出)的动态变量,其随时间演变,并依赖于情境应激源(例如遇到的道路情况、工作负荷水平)以及人格特质或“智能体”。
效应”,另一个潜在的时不变个体特定变量。驾驶员行为(如超速、加速)、决策(如闯红灯违章)和生理状态(如心率)会随着时间的推移反复受到状态压力的影响。
接下来,我们介绍建模方法,然后对不同模型组件进行公式化。
A. 建模方法
该建模方法在计量经济学随机效用建模框架内([46]–[48]),将结构方程模型(潜在变量及其表现形式)与离散选择模型相结合。该模型基于驾驶员状态压力的演变,捕捉驾驶路线过程中驾驶行为和生理状态随时间的演化。
对状态压力的动态性有多种建模方式,包括状态依赖(某一时间段的压力受前一时间段的压力影响)和序列相关性(不同时段的压力水平由于依赖于一个共同的时间不变未观测因素而产生关联)。我们测试了这两种方法,发现具有序列相关性的模型对数据的拟合效果更好[49]。因此,本文仅展示具有序列相关性的模型。
1) 符号表示 :模型中使用的符号表示如下。向量和矩阵以粗体字显示。
N: 个体总数;n是个体的索引。
时间段的数量;t是时间段的索引。
S:表示外生因素的独立二元变量,这些外生因素会引发压力,例如情境因素(如道路事件、由次要任务引起的工作负荷水平);Sn是个体n所经历的所有情境变量的矩阵,S(n,t)是个体n在时间段t所经历的所有情境变量的向量。
SS:状态压力(潜在或不可观察变量);SS(n,t)是个体n在时间t的状态压力。
O:作为状态压力的指标或表现所使用的观测因变量(例如驾驶表现和生理指标);On是个体n的状态压力所有指标的矩阵,而O(n,t)是个体n在时间段t内状态压力所有指标的向量。
R:状态压力指标的数量;r是指标的索引。
y:二元选择指标;yn是个体n所做选择的向量,y(n,t)是个体n在时间段t做出的选择(例如,在交通信号灯情况中,y(n,t)若受试者选择闯红灯则等于1,否则等于0)。
U:选择项效用矩阵;U(n,t)是个体n在时间段t可选方案效用的向量。
AE: 个体效应(随机项),表示个体特定的、不随时间变化的因素;AEn是个体n的个体效应。
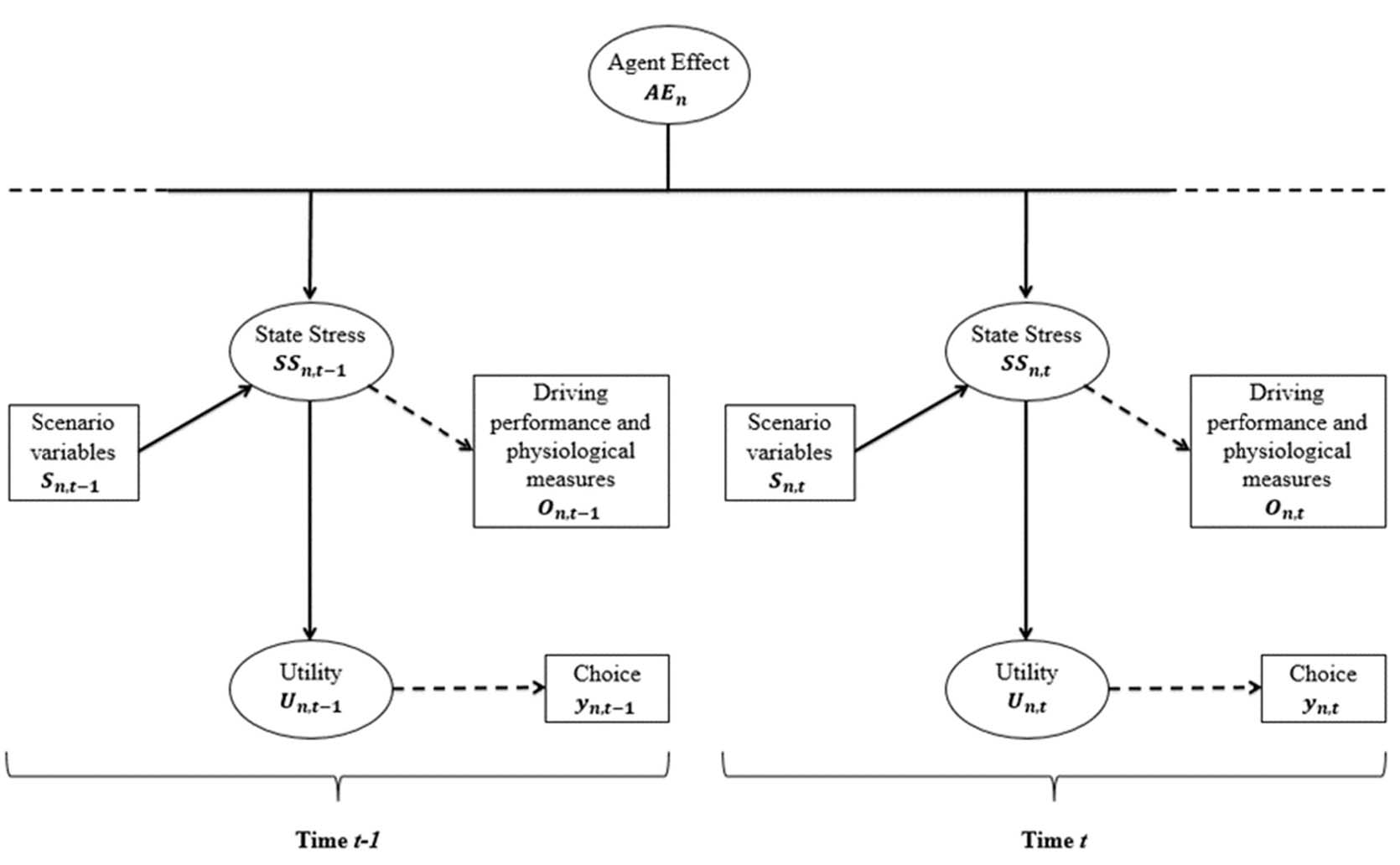
所提出模型的框架如图1所示。在该图中,矩形表示观测变量,椭圆表示潜在变量。结构关系(因果)关系用实线箭头表示,测量关系(观测指标与潜在底层变量之间)用虚线箭头表示。图的中间部分显示了潜在变量模型(状态压力),下部部分显示了选择模型。
2) 使用序列相关性建模动态性 :待建模的驾驶路线由特定的离散时间段t表示。状态压力在整个驾驶路线中的动态演变通过其在这些时间段上的演化来体现。在包含N个个体的样本中,针对每个个体n在感兴趣的时间段获取面板或重复数据。在潜在变量模型(如下一小节所示)中,在每个时间段的状态压力结构方程中加入一个由个体特异性随机成分构成的个体效应,以捕捉随时间持续存在的、源于个体相关未观测因素的不可观察异质性。例如,个体间的此类差异可能是一种人格特质,如个体经历压力的倾向性。该个体效应被假定为正态分布,如
A E ∼ N(0, σ 2
AE). (1)
B. 潜在变量模型
潜在变量模型表示驾驶员状态压力,该压力基于以下结构方程和测量方程进行量化。结构方程用于预测压力水平,而测量方程则表示压力对各项测量指标的影响。
1) 结构方程 :在每个时间段t,驾驶员状态压力由该时间段内起作用的多种变量引起,如引言中所述:i) 增加由次要任务引起的工作负荷增加,ii)驾驶环境/情境,例如道路事件、道路几何特征、交通拥堵情况或天气状况,以及维持车辆控制所需付出的努力,以及iii)代表特质压力/感知压力倾向的稳定潜在变量,该变量是每个个体特有的“个体效应”。根据所建模的情境,分析人员应明确包含这些变量以解释状态压力。例如,如果工作负荷水平被系统性地改变,或者驾驶情境从城市变为乡村,则这些变量应纳入模型中。还应包括一个常数项,以捕捉诸如维持车辆控制所需努力等不可观察解释变量的均值。因此,个体n在每个时间段t的状态压力结构方程可一般性地表示如下
SSn,t= CteSSt+ βSSn,t+ A En+ n,t
t= 1,2,…,T. (2)
术语CteSSt是针对时间段t的特定常数(待估计),βS是一个参数向量(待估计),表示自变量对状态压力的效应。n,t是独立同正态分布的扰动项,如(3)式所示,其方差为 σ 2 t
n,t ∼ N(0, σ 2 t )
t= 1,2,…,T. (3)
2) 测量方程 :驾驶员压力的效应通过驾驶表现指标(如速度和加速度)以及驾驶过程中采集的生理指标(如心率)来体现。这些观测指标被用作量化每个时间段t驾驶员状态压力的指标。具体选择哪些指标取决于
选择纳入的指标由关于驾驶表现和压力的生理表现的文献证据以及模型的统计拟合优度指导。例如,与压力相关的常见驾驶表现指标包括速度、加速度、制动、反应时间、方向盘操作、车道位置和跟车距离([41],[42])。与压力相关的常见生理指标包括心率、心率变异性、皮肤电导、血压、呼吸频率、眼部活动和脑部活动([18],[41])。这些指标通常取非负值,且应具有非负支撑的分布。此类分布的一个示例是本文采用的指数分布。在这种情况下,每个指标Or,n,t对应的测量方程如公式(4)所示,其中假设某一时刻的压力会立即在多个指标中表现出来,这一假设应适用于本研究中所使用的突发/突然事件。
Or,n,t= exp(αSS,r+ λSS,rSSn,t+ωr,n,t)
t= 1,2,…,T
r= 1,2,…,R (4)
参数αSS,r(常数)和λSS,r(因子载荷)需要进行估计。ωr,n,t,如公式(5)所示,是每个指标特有的测量误差项,且独立同正态分布,其标准差 σωr需要进行估计。
ωr,n,t ∼ N(0, σ 2 ωr)
t= 1,2,…,T
r= 1,2,…,R (5)
λSS,r捕捉了潜在状态压力对指标r的效应。此处假设 λSS,r在时间上保持不变,即状态压力在两个时间段的变化将通过同一指标在相同两个时间段的取值变化,在不同个体中以相同方式表现出来。由于个体间异质性(例如心率值的差异、反应差异等)可能导致指标与潜在底层变量之间测量关系出现误差,此类差异由潜在变量测量方程中的误差项加以体现。此外,也可假设潜在变量对指标的影响(即λSS,r)在个体间呈随机分布而非固定不变。
C. 选择模型
诸如是否闯红灯之类的离散决策,通过基于随机效用框架并以效用最大化为决策准则的离散选择模型进行建模[50],[51]。在此框架中,每个备选方案都具有一个效用或吸引力,个体被假定会选择效用最高的方案。由于文献报道压力水平会影响决策能力[52],[53], ,因此将状态压力纳入模型
在效用函数中,作为是否进行违规选择的预测因子。此外,压力对表现的影响取决于驾驶员将其感知为“威胁”还是“挑战”的情境:前者会导致表现下降,而后者则会提升表现[52]。假设驾驶员在时间t到达红灯,违规的效用由 (6.a)给出,而不违规的效用则由(6.b)给出,如下所示。
Uviolate(n,t)= ASCt+ βSSSSn,t+ εviolate(n,t)
t= 1,2,…,T. (6.a)
Udont−violate(n,t)= 0+ εdont−violate(n,t)
t= 1,2,…,T. (6.b)
在(6.a)和(6.b)中,εviolate(n,t)和εdont−violate(n,t)分别是个体n在时间段t选择违规和不违规选项时的随机扰动项,用于反映影响决策的未观测因素。这些项独立同分布于极值类型I (0,1)。 βSS是一个待估计参数,表示状态压力对闯红灯倾向的效应。
D. 似然函数
该模型采用最大似然法进行估计。似然函数是观测到的因变量序列(随时间变化)的联合概率,即个体n的离散选择yn(yn,1,yn,2,…,yn,T)以及驾驶表现和生理状态等状态压力指标On(On,1, On,2,…, On,T)的联合概率。该联合概率及其组成部分见附录。
III. 驾驶模拟器实验的应用
所开发的驾驶员压力模型被应用于在贝鲁特美国大学 (AUB)进行的驾驶模拟器实验中收集的数据,该实验配备了心电传感器。以下各小节描述了驾驶模拟器实验、统计分析的概述、模型应用、估计结果以及与无状态压力的简单模型的比较。
A. 驾驶模拟器实验
驾驶模拟器实验研究了在城市道路情况下由递增的认知负荷引起的压力。实验过程中监测了驾驶表现和心率数据。
实验使用了DriveSafety公司提供的高保真/高性能完全集成的驾驶模拟器DS‐600c来收集驾驶表现数据(例如,速度、Ped depression)。该模拟器由一辆全宽半驾驶室福特汽车和三个投影仪组成,通过三个屏幕以 180◦视角显示预设的驾驶场景。该模拟器此前已在AUB用于研究愤怒与攻击性驾驶[54]以及行人‐车辆交互[55]。本实验还采集了心率数据。
通过NeuroDyne医疗的MEDACSystem/3仪器单元的心电传感器获取均值。为了同步所有测量数据的数据收集,驾驶模拟器的采样率与心电传感器的采样率相同(10赫兹)。
驾驶路线长度约为7.5公里,由城市环境中的直线和弯曲道路组成。每个道路方向均为单车道,并在路边设有停放车辆。为了完成整个驾驶路线,受试者需要遵循视觉指示(例如“直行”)。在驾驶模拟器实验过程中,受试者在整个驾驶过程中会两次遇到以下三种特定道路事件:(1)行人突然横穿道路进入驾驶员车道;(2)卡车在驾驶员前方行驶时突然停止;(3)当驾驶员接近交叉路口时,信号灯变为红色(当驾驶员距离交叉路口100米时,无论其速度如何,信号灯均变为黄色)。这些突发/极端场景的选择主要受到贝鲁特驾驶情境的启发,该地区交通法规的遵守和执行较为松散(例如,驾驶员通常不了解行人在人行横道上的权利,且闯红灯现象较为严重)。速度限制设置为50公里/小时。
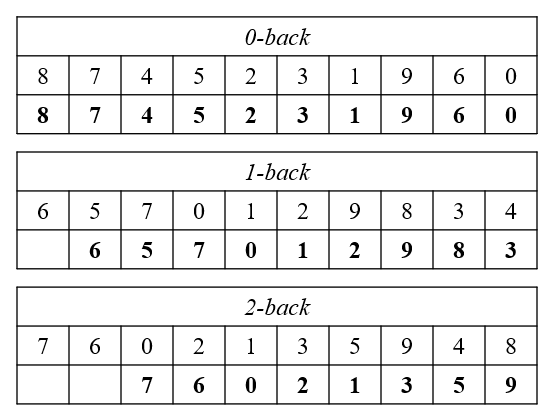
为了增加驾駛员认知负荷,除了驾驶主要任务外,还采用了延迟数字回忆(n‐back)[42]作为次要任务。
该听觉‐言语任务呈现一系列随机数字(0到9),并要求受试者根据任务的难度级别以三种不同的方式重复这些数字。在0‐back级别,受试者需要重复刚刚说出的数字;在1‐back级别,受试者需要重复前一个数字;在2‐back级别,受试者需要重复前面第二个数字。图2展示了所采用任务各个级别的一个样本示例。每个数字提示时受试者需要正确回答的内容以粗体显示。
驾驶模拟器实验包含三个阶段,持续时间约为12分钟,具体时长取决于受试者的速度:(1)基线阶段,受试者不遭遇任何
道路事件,也不执行次要的n‐背任务;(2)控制阶段,驾驶员遭遇三个道路事件,但无需执行n‐背任务;(3)处理阶段,驾驶员在遭遇三个道路事件的同时还需执行n‐背任务。n‐背任务在整个处理阶段期间持续进行。特别是,受试者在n‐背任务的一个层级上遭遇一个道路事件。
处理阶段和控制阶段的呈现顺序在受试者之间进行了交叉平衡。道路事件在整个驾驶路线中也以交叉平衡的方式呈现。完成驾驶模拟器实验后,参与者填写了驾驶后问卷。
该实验程序已获得美国大学贝鲁特分校机构审查委员会的批准。更多细节请参见[35]和[49]。
驾驶模拟器实验以美国大学贝鲁特分校的学生群体为目标,该群体属于年轻人,更有可能在驾驶过程中参与分散注意力的活动。实验志愿者的招募通过课堂通知以及在校园内随机进行个人接触的方式邀请学生参与。共有103名美国大学贝鲁特分校的学生自愿报名参加研究,但模型应用所使用的样本为其中完成整个驾驶路线的74名学生。
这些学生的年龄范围为18至28岁,样本包括48名男性和26名女性。所有参与者均为持照驾驶员:35名学生驾驶经验不足两年,39名学生驾驶经验超过两年。
B. 统计分析摘要
关注的指标包括驾驶表现(例如,最高速度)和生理指标(例如,最大心率)。这些指标在每个感兴趣路段上进行计算,感兴趣路段定义为事件开始(例如,行人开始过马路、卡车开始减速、交通灯变为黄色)到事件结束(例如,受试者到达人行横道、受试者在卡车后停车、交通灯变为红灯)的时间段。对于基线阶段,感兴趣路段由一段400米长的直线道路组成。
由于发现多个数据向量不符合正态分布[35],[49], ,我们在统计分析中采用了非参数方法,具体如下。
1) 配对分析(被试内)以检测n-背任务的效应 :我们使用威尔科克森符号秩检验,在每种道路情况(即行人、卡车、交通信号灯)下比较处理阶段与控制阶段。该分析显示,在所有情境(行人、卡车和交通信号灯)中,控制阶段与处理阶段之间的最高速度在95%置信水平上存在统计学显著差异,且控制阶段的中位数值更高。在行人和交通信号灯情况下,最大踏板踩下深度在95%置信水平上存在统计学显著差异;在卡车情境下,该差异在90%置信水平上具有统计学显著性,且控制阶段的中位数值更高。较小的数值
表II 统计分析摘要
在处理阶段,由于驾驶时同时执行次要任务而增加了认知负荷。在所有道路事件中,最大心率在95%置信水平上存在统计学显著差异,处理阶段的中位数值更高,表明在执行n‐背任务期间工作负荷或压力更高。尽管处理阶段与控制阶段之间的反应时间没有显著差异,但进一步分析考虑了这些阶段呈现顺序的影响后发现,当处理阶段先于控制阶段时,在行人情境和交通信号灯情况下,由于额外的认知负荷,处理阶段的中位反应时间显著更高(在95%置信水平上)。另一方面,当控制阶段先于处理阶段时,在行人情境下,控制阶段的中位反应时间显著更高(在95%置信水平上)。结果因阶段呈现顺序不同而产生的差异,可能反映了驾驶员在两次遇到相同情境时的学习效应和预期。
表II总结了该分析的结果。
2) 多组分析(组间)以检测n-背任务各水平之间的差异 :我们使用Kruskal‐Wallis检验,针对特定道路情况,比较了n‐背任务不同水平(0、1、2)下所关注变量的差异。该分析结果显示,在以下道路情况下,n‐背任务各级别之间检测到了显著差异:
• 卡车情境——在95%置信水平下,平均心率、最小心率和最大心率的测量值均发现了统计学显著差异。为了确定哪些水平对这些测量值具有不同的效应,我们进行了带Bonferroni校正的多重比较。结果显示存在统计学显著差异
differences at the 95% level of confidence between the 0-back and 2-back levels in the average, minimum, and maximum heart rate measures with higher median values at the 2-back level.
• 行人情境 – 采用Bonferroni校正的多重比较显示,在90%置信水平下,0‐Back和2‐Back级别在平均心率和最小心率指标上存在统计学显著差异,且2‐Back级别观察到更高的中位数值。我们在Kruskal‐Wallis检验发现n‐背任务各级别对生理指标产生显著效应后,进行了Bonferroni校正的多重比较。
基于Kruskal‐Wallis检验结果,我们还注意到,在所考虑的三种道路情况下,n‐背任务的不同水平对驾驶表现指标的影响未发现统计学显著差异。此外,在交通信号灯情况下,n‐背任务的不同水平在感兴趣的生理指标方面也未发现统计学显著差异。
有关统计分析的更多细节,请参阅[35]和[49]。
C. 模型应用
该模型旨在量化驾驶员压力在驾驶模拟器实验三个阶段(基线、控制和处理)中随时间演变的情况。受试者首先进行基线阶段驾驶,对应时间段t= 1,期间无道路事件发生,且不参与次要任务。因此,基线阶段反映了受试者在进入包含自变量(道路事件和工作负荷)的控制/处理阶段之前的基线压力水平。
级别)。接下来的处理阶段和控制阶段由六个连续发生的
道路事件表征,对应于六个时间段t= 2, 3,…, 7,每个时间段引入一个特定的道路事件。此外,这些时间段中的三个(即2、3、4或5、6、7)与次级认知n‐back任务的三个水平相结合,对应于处理阶段。因此,基于每个时间段收集的数据,在驾驶模拟器实验中对受试者的行为在七个不同的位置进行了分析。
是否闯红灯的选择与交通灯事件相关。状态压力结构方程中的解释变量包括n‐背任务的水平(代表工作负荷)和遇到的道路事件(代表驾驶环境/情境)。驾驶表现和心率测量被用作每个时间段状态压力的指标。状态压力被纳入选择的效用函数中,如以下各节所述。下文将展示状态压力的潜在变量模型和选择模型。
需要注意的是,由于每个道路事件在实验中都会遇到两次,一次在时间段2、3或4,另一次在时间段5、6或7,因此由于学习效应,它们在第二次出现时可能产生不同的效应。该建模框架通过在状态压力结构方程(2)以及对应于闯红灯决策的效用方程(方程6.a)中使用特定时间常数,能够考虑学习效应的影响。在本应用中,由于样本量较小,我们无法为不同时间段估计不同的状态压力常数项。
然而,对于闯红灯决策,我们为时间段2至4与时间段5至7分别估计了不同的常数项。理论上,类似的方法也可应用于其他压力测量(方程4),但为了保持模型在计算上的可操作性,本文未进行此类处理。
1) 潜在变量模型 :由于文献中报告高工作负荷水平是导致压力的主要因素[4],[11],[14],[15],[17],[22],,我们使用一个结构方程来捕捉两个构念之间的因果关系(工作负荷水平作为自变量,状态压力作为因变量)。此外,由于本研究中使用的次要任务基于工作负荷水平的明确变化,其中2‐back级别需要最高需求,而0‐Back需要最低需求,因此我们建议将工作负荷水平视为可观察解释变量,而非不可观察变量(因为工作负荷的分类由次要任务明确定义)。另一方面,压力作为结果是不可观察的,但通过驾驶员表现(例如,速度和反应时间)和生理状态(例如,心率)的变化体现出来。因此,本研究中将压力量化为一个潜在变量。
a) 结构方程 :将方程(2)应用于本实验,得到基线阶段的状态压力表达式(方7)以及后续时间段的状态压力表达式(方程8);
SSn,1= Cte SS 1 + A E n+ n,1
t= 1 (7)
SSn,t= CteSSt+ βPed Pedn,t+ βTL T Ln,t +βZeroZeron,t+ βOne Onen,t+ βT woT won,t +A En+ n,t
t= 2,3,…,7 (8)
其中,个体效应和扰动项及其分布假设与前文定义一致。
在时间段t= 2, 3,…,7的状态压力是处理阶段道路事件和次要任务认知负荷水平的函数。在整个驾驶路线中,驾驶环境没有显著变化,因此无需引入可能影响压力的相关额外解释变量。行人和交通信号灯道路事件分别表示为Ped和TL。如果受试者遇到相应的道路事件,则取值为一级,否则为零级。次要任务的n‐back水平表示为Zero、One和Two。每个变量在受试者需要执行相应水平时取值为一级,否则为零级。Ped事件和TL事件对状态压力的影响以卡车事件为参照进行分析(卡车事件未包含在SS方程中),而n‐back水平(Zero、One、Two)的影响则以无n‐背任务为参照进行分析。
b)
测量方程
:从驾驶模拟器输出中提取的驾驶表现指标被用作潜在变量“状态压力”的指标,同时结合从心电传感器提取的心率作为驾驶员压力的生理量化指标。驾驶表现指标包括最高速度(r= 1)、最大油门踏板踩下程度(r= 2)和反应时间(r= 3)。最大心率标记为r=
4。这些指标被发现呈对数正态分布,并根据统计分析[35]的结果进行选择,分析表明它们受到n‐back任务所增加的认知负荷的显著影响。
其他指标(例如车道位置的标准差)也进行了测试,方法是按照公式(4)和(5)的设定将其作为压力的额外测量方程;然而,状态压力对这些变量的影响程度较低且不显著(即统计上该效应与零无差异),因此未将其用作状态压力的指标。
需要注意的是,反应时间指标被排除在时间段t= 1(该时间段不包含任何道路事件)的状态压力指标向量之外,同时也被排除在发生违规时红灯违规者的时间段t的状态压力指标向量之外,因为违规者的反应时间未定义。
2) 选择模型 :交通灯事件包含一个选择情境,受试者必须决定是否在红灯时通过交叉路口(即违规)或不通过。
每位受试者在实验中面临该事件两次,因此每位受试者做出两个选择。个体n的违规效用由方程(9.a)和(9.b)给出,而不违规的效用方程由(6.b)给出,该方程适用于所有时间段 t= 2,3,…,7,使得
Uviolate(n,t)= ASC1+ βSSSSn,t+ εviolate(n,t)
t= 2,3,4. (9.a)
Uviolate(n,t)= ASC2+ βSSSSn,t+ εviolate(n,t)
t= 5,6,7. (9.b)
D. 模型估计
为了实现模型识别和简洁性,采用了若干限制条件,包括:(1)在时间段t= 2, 3,…, 7的状态压力结构方程中使用相同的常数项;(2)在时间段t= 2, 3,…, 7的状态压力结构方程中,扰动项具有相同的方差;(3)对于状态压力潜在变量的每个指标,测量误差项在所有时间段内具有恒定的方差。
出于数值计算的考虑,我们对数据[56]进行了缩放处理,使各变量具有相近的数量级。最大心率和最高速度值除以10,最大油门踏板踩下程度乘以10。
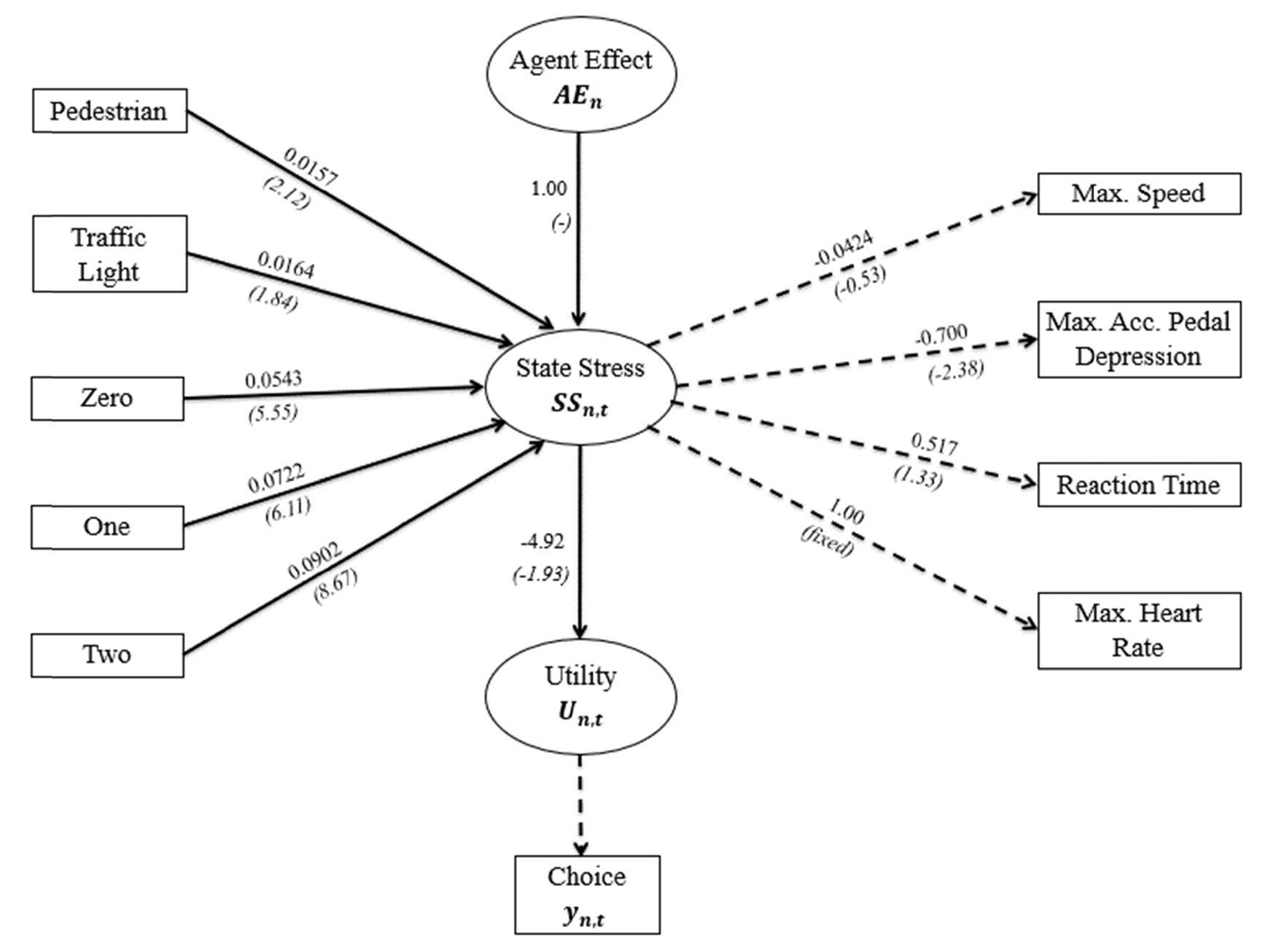
该模型在 Python Biogeme[56],[57],(一个开源免费软件,biogeme.epfl.ch)中进行估计,该软件广泛用于参数模型的估计,尤其是离散选择模型。由于似然函数中的积分维度较高,因此采用了模拟最大似然法。蒙特卡洛积分使用哈尔顿抽样完成。抽样次数被逐步调整以10,000为增量,直到连续两次试验中获得的参数估计值差异小于10%为止。每个潜在变量(个体效应和七个代表七个时间段内状态压力的不同潜在变量)的抽样次数达到40,000次。尽管该模型在理论上是可识别的,但需要大量的抽样次数才能达到稳定,这可能是由于模型结构复杂以及样本量较小所致。为了简洁性,仅在图3中总结了主要效应。
还测试了包含序列相关性以及人口统计学特征(如性别、驾驶经验)的多个模型设定;然而,在变量的统计显著性和拟合优度方面,所提出的模型表现优于其他模型设定。
E. 结果分析
根据估计结果,可以得出以下结论。
1) 潜在变量模型 :
a) 状态压力–结构方程 :在时间t= 1的状态压力结构方程中的常数项为正(2.23),且在95%置信水平上具有统计显著性(t统计量= 162.22)。它表示影响受试者压力水平的未观测因素(除个体效应外)的均值,包括仅由驾驶任务本身引起的压力(即维持车辆的横向/纵向控制)。此外,由于它是被测量的
在基线阶段,该常数还反映了实验环境引起的压力,并可归因于驾驶模拟器实验开始时的新奇因素,此外还包括可能在实验开始前就已影响状态压力并在基线阶段延续的残余压力。在时间段t= 2, 3,…, 7的常数为正值(2.14),且在95%置信水平下具有统计显著性(t统计量= 140.39)。
由于状态压力的结构方程未包含卡车事件和控制阶段,因此在时间段t= 2, 3,…, 7的常数表示个体在控制阶段遭遇卡车事件时的状态压力。该常数还捕捉了状态压力方程中未包含的其他变量的均值,包括仅由驾驶任务本身引起的压力。个体效应的标准差 σAE(参数估计值为0.151;t 统计量= 14.50)在95%置信水平下具有统计显著性,表明个体不可观察项对状态压力具有显著效应。
行人和交通信号灯事件的正系数表明,与卡车事件相比,这些事件引发了更高的压力水平。Ped变量在95%置信水平上显著,而TL变量在90%置信水平上显著。然而, Ped(0.0157)和TL(0.0164)系数之间的差异在95%置信水平上无统计学意义(差异的t统计量= 0.078< 1.96),这意味着Ped和TL事件对状态压力的影响相对相似。
n‐背任务水平的系数为正且在统计上显著(95%置信水平),表明处理阶段的状态压力显著高于控制阶段。2‐Back任务引起的压力水平最高,0‐Back任务引起的压力水平最低。这一观察结果证实,次要任务的工作负荷水平增加会导致个体经历的压力水平升高。
需要注意的是,常数项(代表诸如维持车辆控制所需的驾驶任务本身等不可观察因素的均值)的绝对值大于情境变量(道路事件和工作负荷水平)的系数。这表明,在给定的实验条件和驾驶员样本下,保持车辆纵向和横向控制所需的努力等未观测因素对压力的影响似乎大于心理工作负荷和道路事件。
b) 状态压力–测量方程 :最高速度和最大油门踏板踩下程度的因子载荷为负值,表明当状态压力增加时,受试者倾向于降低其最高速度和最大油门踏板踩下程度。这种驾驶表现的变化反映了受试者所采取的调节行为,以在驾驶过程中执行额外的认知任务,尤其是在需要更多注意力并产生更大压力的情况下。该结果与统计分析[35]的发现一致
比较了控制阶段和处理阶段(受试者内比较),并展示了驾驶员在n‐背任务下(处理阶段)的调节行为。诸如 [58],[59]的研究也支持这些发现。反应时间因子载荷的正值表明,在较高压力条件下,驾驶员对道路危险做出反应所需的时间更长。这也与统计分析[35]结果一致,该分析评估了次要任务对每个受试者的影响;尤其是在处理阶段遇到行人和交通信号灯情况时,反应时间显著增加。诸如[14]和[60]的研究也发现,随着认知负荷的增加,反应时间延长。
2) 选择模型 :ASC1(t= 2, 3,4处的违规常数估计值为8.88;t统计量= 1.64)高于ASC2(t= 5,6, 7处的违规常数估计值为7.29;t统计量= 1.32),这表明违规更可能发生在第一阶段而非第二阶段。这一结果与驾驶模拟器实验的观察结果一致,实验显示在第一个交叉路口发生了11次违规,而在第二个交叉路口仅发生3次违规。该发现突显了学习效应的影响,因为受试者可能会预期此类事件在驾驶过程中再次发生,而在红灯时通过第一个交叉路口可能会使其在第二个交叉路口重新关注交通信号灯。
由于通过使用两个特定于选项的常数项对学习效应进行了控制,一个用于第一组事件,另一个用于第二组事件,因此我们不认为学习会对压力输出产生偏差。
违规效用函数中状态压力的负号意味着,如果个体的压力状态较高,则他/她闯红灯的概率会降低,这表明状态压力的组成部分,即道路事件和次任务水平(如果存在),对个体在交叉路口的决策具有正面效应,并有助于提醒驾驶员,提高其情境意识。这种影响可以解释为:驾驶员可能不会将驾驶任务和次要任务带来的高认知负荷视为“威胁”,而是视为“挑战”,因此由此产生的压力会降低违规的概率。这种压力对决策能力的影响在[52]中有所讨论,且与耶基斯‐多德森定律一致,该定律表明当唤醒水平向更优水平方向移动时,表现质量会得到提升——这种情况发生在倒U型曲线的左侧([1],[4],[6])。
F. 与简单模型的比较
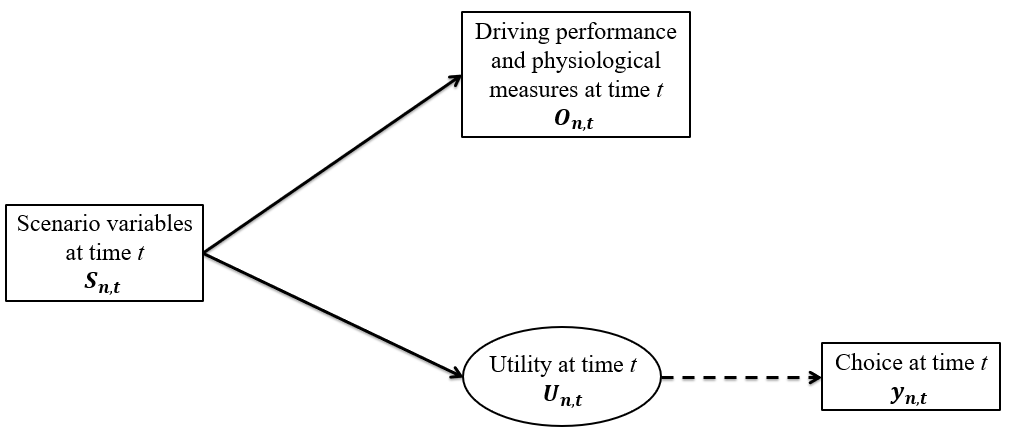
为了评估使用上述相对复杂模型所带来的优势,我们还估计了一个未明确建模状态压力的简单模型。也就是说,我们在简单模型中移除了状态压力的结构方程,并将所有情境变量和n‐背任务的各个水平直接纳入最高速度、最大油门踏板踩下程度、反应时间、最大心率以及效用函数的方程中。我们允许某一特定变量在这些方程中具有不同的系数。
我们预期某个特定变量(如n‐back任务难度水平)对反应时间和最大心率的影响会有所不同,因此该模型包含的参数多于带有状态压力的模型(在状态压力模型中,每个变量在状态压力方程中仅有一个系数,并通过测量方程中的因子载荷进行缩放)。简单模型在估计时未包含动态性,因为在不同方程中引入具有不同标准差项的个体效应会导致不可识别模型。简单模型的结构如图4所示。
为了简洁起见,我们未展示模型的估计结果。我们使用两个标准比较了简单模型和含状态压力的动态模型:拟合优度和预测能力。采用了两种拟合优度指标:调整后的 rho‐bar平方和赤池信息准则(AIC)。这些指标如表III所示,同时列出了零对数似然、最终对数似然以及参数数量。
含状态压力的动态模型比简单模型具有更好的拟合优度,因为动态模型的调整后的rho‐bar平方更高,且赤池信息准则低于简单模型。
关于预测能力,我们采用了以下交叉验证方法:将数据分为五个子集或折。对于每个折Fk,k ∈[1, 5],保留其中一个子集作为验证折,其余子集用于估计/拟合模型,并预测验证折的因变量指标。然后,计算每个时间段内观测(实际)指标与预测指标(使用所开发的模型)之间的百分比差异,并对每个折的所有时间段取平均值。表四汇总的结果表明,在预测能力方面,简单模型整体表现略优于混合选择模型(HCM)。该结果与混合选择模型更优的拟合优度相反,值得在更大样本量以及可能的其他/更长实验情境下进一步研究。然而,这种差异较小,且混合选择模型具有额外优势,即能够预测驾驶员的压力状态。
两个模型在速度和心率指标上的表现总体良好,但在反应时间和最大油门踏板踩下程度方面的预测效果较差。
四、讨论
A. 贡献与技术应用
本研究的理论贡献在于对驾驶员压力的交互式方法进行数学化概念构建[11],[23]。所建立的数学模型考虑了情境与个体因素,并将状态压力视为由驾驶行为和心率变化所体现的潜在变量。该建模框架具有通用性,可应用于除压力之外的其他驾驶员状态的建模。
从技术角度来看,所开发的模型在提升道路安全方面具有潜在的技术应用价值。如文章前面所述,实时检测驾驶员状态可集成到车载系统中,以帮助驾驶员改善其驾驶表现。所开发的动态模型可用于实现这一目的。该模型的输入包括由生理传感器提供的与驾驶员相关的条件(例如通过监测心率来评估工作负荷/分心程度),以及由联网车辆的通信技术提供的与情境相关的条件,例如车对基础设施(V2I)(提供交通信号灯等信息)、车对行人( V2P)(提供行人、骑自行车的人等信息)和车对车( V2V)(提供周围车辆的信息)。因此,更新后的驾驶员状态动态信息有助于车载系统朝适当的方向进行调节,即降低压力或提高警觉性。例如,如果发现驾驶员处于超负荷且压力较大的状态,集成系统可通过推荐放松环境(如音乐、照明)或暂时减轻认知负荷(例如接管驾驶任务,使车辆切换至自动驾驶模式)来降低其压力水平。另一方面,如果发现驾驶员注意力不集中或负荷不足,集成系统则可通过发出听觉警报等方式提高其唤醒水平或警觉性。
由此,此类系统能够增强驾驶员安全。
表III 简单模型与含状态压力的动态模型的拟合优度
表四 比较两种模型(混合选择模型与简单模型)在实际值与预测值之间差异(以百分比表示)方面的表现
以及福祉。此外,通过在碰撞避免安全系统的设计中整合状态检测,所开发的模型有助于提高事故发生的可能性的可预测性。
该模型利用n‐背任务水平(0‐Back、1‐Back和 2‐Back)作为驾驶员状态压力的预测因子。这些水平可推广用于对驾驶员在驾驶过程中可能参与的任何分心活动所引起的工作负荷进行分类,例如低、中和高。工作负荷/分心的分类可通过基于车辆内传感器设备提供的输入(如速度、心率)所采用的机器学习技术与算法([18],[61])来实现。
为了实时监测驾驶员的生理指标,福特汽车公司开发了一款将生理传感器嵌入车辆[62]的原型。麻省理工学院媒体实验室也展示了利用安装在方向盘上的摄像头远程监测心率和呼吸频率等生理指标的方法。他们提出了嵌入汽车中的潜在压力指标,并建议采用自适应音乐、舒缓温度、共情GPS和矫正头灯等交互方式来帮助缓解压力[63]。
在此背景下,所开发的模型可集成于安全系统的设计中,在状态压力检测方面发挥重要作用。
B. 局限性
本研究开发的模型存在若干局限性。首先,该模型基于一次驾驶模拟器实验,其驾驶时间相对较短,可能无法完全再现真实驾驶条件。受试者在实验的虚拟环境中可能表现出比实际生活中更多的冒险行为,并且可能比本研究中所采用的时间更长地间歇性或持续性分心。如果在实际驾驶情境中向受试者分配n‐背任务,该任务可能被认为更加危险,且情景变量在真实驾驶条件下可能会产生更显著的影响。然而,所使用的驾驶模拟器为具有相对有效性的中等级别模拟器,因此结果预计在相对基础上成立。第二,道路指示
在驾驶模拟器实验中通过广告牌向受试者呈现的内容可能引发了视觉分心,从而干扰了本实验所测试的认知负荷。
第三,研究结果仅适用于年轻学生群体,可能无法推广到所有人口统计群体。第四,受试者是自愿参与本实验的;如果参与者与非参与者具有不同的驾驶行为,则样本可能存在自我选择偏差。然而,我们并不认为自我选择会成为一个问题,因为在实验前并未告知受试者研究的真实目的,即驾驶分心。由于参与者不知道研究的真实目的,我们也不认为他们会故意调整自己的行为以避免分心或相反。
C. 未来研究
尽管本文开发的混合选择模型在拟合数据方面优于未考虑状态压力和动态性的简单模型,但其预测能力略低于简单模型,这一发现需要借助更多数据或其他实验设置进一步研究。研究发现,压力水平与闯红灯的概率呈负相关,可能起到提醒驾驶员并在此类交通状况下改善决策能力的作用;然而,压力对反应时间等其他性能指标具有负面影响。这些不同的效应值得进一步探究。
未来的研究还可以扩展本研究中采用的情景变量设计,例如包括跟车、交通拥堵、鸣笛、其他类型的次要任务等。尽管n‐背任务已在以往的认知负荷研究中被使用,但未来研究可采用其他生态效度更高的任务,如打电话交谈。可以分析情景变量在更长时间段内的效应(而不仅限于事件发生时),以确定压力在事件发生后是延续还是消散,并可对驾驶员内部异质性在压力水平方面的差异进行建模。
此外,对于更为细微的事件,压力的发生与其通过生理测量被检测到之间可能存在时间滞后。与本研究中使用的相比(例如,[12]),这需要更改测量方程以适应这种延迟。所建模的压力水平也可以通过收集驾驶员主观报告的压力感知数据来验证,例如,在驾驶情景前后收集此类数据(如[25]中所述)。尽管有人认为生理指标本身有时可能反映的是工作负荷而非压力,但结合多个难度级别的n‐背任务以及关键驾驶事件(作为压力源)的使用,增强了我们对所建模的驾驶员状态不仅仅是工作负荷而是压力的信心(参见参考文献[24]中类似的论证)。工作负荷监测可包括额外的测量手段,如眼动追踪(可检测视觉分心并考虑其对认知负荷的干扰)、皮肤电导、呼吸频率、心率变异性以及脑电图或EEG。其中一些指标(如心率变异性或皮肤电导)可能比最大心率更敏感,能够检测到由比本文所用更为细微或不那么突然的交通状况引起的工作负荷或压力。数据收集可以扩展以增加样本量,并纳入普通人群中其他群体(而不仅是学生),他们的驾驶经验和对压力的反应可能有所不同。最后,后续研究可以将本文开发的模型与本文前面引用的其他驾驶员压力监测系统进行比较。

















 1456
1456

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









