



基于强度的鲁棒定位方法用于冰雪湿滑路面的 自动驾驶
摘要
近年来,自动驾驶车辆正在快速发展。在前期实施 阶段,必须解决许多特定问题才能将该技术推向市场。本文重点 研究在积雪和湿滑路面环境下的行驶问题。首先,激光雷达反射 率在湿滑路面上的质量会下降。因此,设计了一种累积策略以增 加在线激光雷达图像的密度。为了增强累积图像的纹理,采用主 成分分析(PCA)来理解地图图像中的几何结构和纹理模式。 然后,根据每个特征向量所解释的方差分布,利用主成分对激光 雷达图像进行重建。其次,雪线的出现会改变激光雷达图像中预 期的道路环境。因此,提取激光雷达图像与地图图像的边缘轮廓, 以编码车道线和路边边缘。通过计算两个轮廓之间的边缘匹配, 改善车辆在横向方向上的定位。所提出的方法已在日本珠洲市和 金泽市2016/2017年冬季期间采集的真实数据上进行了测试和评 估。实验结果表明,该方法提高了自动驾驶车辆在湿滑路面上的 鲁棒性,在存在雪线的情况下实现了车辆横向定位的稳定性能, 并在60公里/小时的速度下显著降低了整体定位误差。
索引术语
自动驾驶车辆,主成分分析(PCA),激光雷达,定位,模板匹配。
I. 引言
自动驾驶车辆已成为提高人类生活质量与安全的重要 需求。在质量方面,此类车辆可显著减少交通拥堵和交通 费用;此外,这一设施适用于所有年龄段的人群,例如残 疾人和老年人均可轻松使用该设施。提升安全是实现自动 驾驶车辆的直接成果。预计自动驾驶车辆将交通事故降低 至接近零的水平,从而能够建立并实现各种网络和共享信 息。各种研究人员已开展研究,以创建车辆周围的世界模型来解释 感知信息,明确需要注意的事项,并据此规划运动[1]。 为了完成这些任务,必须处理 numerous 复杂的操作, 例如定位、建图、路径规划、障碍物检测、交通信号识别 和碰撞预测[2‐5]。
定位与建图共同构成了实现自动驾驶的主要需求。通 过生成高精度地图来准确描述周围环境[6]。然后,通过 测量环境中的观测感知与在横向和纵向方向上对应的生成 地图之间的相似性,使用定位技术对车辆进行精确定位。 从技术上讲,建图和定位策略是基于摄像头或激光成像检 测与测距(LIDAR)等传感器而制定的。基于摄像头的系 统因其商业化程度高且结构简单而更受青睐[7]。然而,基 于激光的系统目前更为可靠,因为激光束的反射率不受光 照条件的影响。此外,可以根据高度信息轻松去除静态和 动态物体[8]。因此,基于激光的系统为平稳过渡到基于摄 像头系统的部署提供了基础。日本金泽大学的自动驾驶车 辆单元正在采用这一过渡策略,以探索、研究并解决许多 特殊且关键的问题。其中,2016年观察到的一个问题是冰 雪和湿滑地面环境下的自主驾驶。这个问题通常被忽视, 因为自动驾驶通常在良好天气条件下进行。然而,如果要 实现自动驾驶车辆的商业化,则不能忽略这一严重问题。
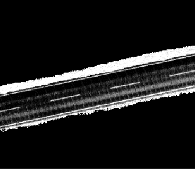
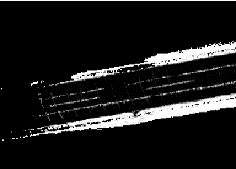
该问题的第一个影响是由于湿滑路面的弱反射率,导致激 光雷达图像质量降低,如图1a所示。因此,与对应的地图 图像相比,激光雷达图像中的许多区域消失。此外,激光 雷达图像的强度水平与地图图像不同。这直接影响了地图 与激光雷达图像之间静态特征的相似性度量。第二个影响 是在车道内及道路边缘附近存在雪线。雪线形成了类似于 车道线的额外区域,如图1b所示。这些额外区域可能主导 相似性度量操作,导致车辆发生横向漂移。这种情况在仅有两条车道的道路上尤其危险。
本文的主要贡献在于解决上述问题并提出相应的解决方案。由于本文是作者此前会 议论文[9],的扩展,因此提供了更多细节和讨论,并解释 了一种在自动驾驶过程中累积激光雷达帧的新策略。通过 累积激光雷达帧来增强道路表示的纹理和结构。采用主成 分分析(PCA)根据地图图像重建累积的激光雷达图像。 这两个独特的步骤有助于提高湿滑路面上激光雷达图像的 质量,恢复部分缺失区域,并将强度水平调整至与地图图 像一致。随后计算激光雷达图像和地图图像的边缘轮廓, 通过多个峰值来描述道路结构。峰值分布有助于编码车道 线、道路边缘和积雪线的位置。积雪线在激光雷达轮廓中 表现为额外的峰值,因此采用一种边缘匹配策略,以减少 积雪线的影响,并基于激光雷达轮廓与地图轮廓之间的共 有峰值来估计车辆的横向位置。
使用真实数据对定位系统及这些改进步骤进行了测试。 数据于2016/2017年在日本珠洲市和金泽市采集。在数据 采集期间经常遇到下雪和下雨天气。我们被允许以最高 60公里/小时的速度进行自动驾驶,过程中遇到了包括本 文所述在内的各种复杂情况。实验结果验证了改进后的定 位系统在应对积雪线和湿滑路面情况时更加稳定和鲁棒。
II. 标准定位系统
定位技术 broadly 分为两类:基于强度和基于特征 [10][11]。在基于摄像头的系统中,通常使用特征,因为图 像包含丰富的不同模式和纹理。这些特征可以提取自电线 杆、广告牌、交通标志、街道指示牌等。相关地图是预定 义的图像,包含特征的各种测量信息,例如位置、尺寸、 形状、颜色等。定位通过最小化地图信息与实际检测到的 特征之间的误差来实现从摄像头图像[12]中提取。另一方面,激光雷达图像较为 稀疏且细节较少,难以准确表达车辆在不同位置的特定特 征。因此,基于激光雷达的系统通常设计为采用对环境的 整体扫描,并可部分结合特征提取以支持定位技术[13]。 激光雷达地图通过累积点云生成,用于在二维或三维坐标 系中精确描述环境。定位通过测量地图与激光雷达图像之 间的匹配得分来实现。在接下来的小节中,将简要介绍一 种标准的基于激光雷达的定位方法及其相关的问题与发展。 该方法曾于2015/2016年在金泽大学的自动驾驶车辆单元 中使用。
A. 基于强度的定位(图像匹配)
全球定位系统数据精度较低,范围在100厘米,无法用于自动驾驶车辆的定位。此外,即使 结合使用实时动态定位系统(RTK系统),从卫星接收到 的信号也会受到噪声影响。该噪声取决于天气和驾驶条件 下的静态和动态物体。航位推算通常用于根据速度v和经过 的时间序列Δt来估计车辆位置xt,DR,如(1)所示。
$$
\mathbf{x}
{t,\text{DR}} = \mathbf{x}
{t-1,\text{DR}} + \Delta t \cdot \mathbf{v}
t
$$
估计误差与从初始位置的距离成正比。为了提高该技术的 置信度并准确获得实际位置xt,Act ,我们尝试使用(2)来估计 参考环境表示与当前环境表示之间的偏移量Δxt,DR 。
$$
\mathbf{x}
{t,\text{Act}} = \mathbf{x}
{t,\text{DR}} + \Delta \mathbf{x}
{t,\text{DR}}
$$
参考表示通过使用激光雷达点云预先定义二维高精度地图 来描述,如图2a所示。当前环境由在线激光雷达图像表示, 如图2b所示。然后通过计算模板(激光雷达)图像与地图 图像之间的互相关来实现定位,如(3)式所示。
$$
R(\Delta x, \Delta y) = \sum_{i=0}^{N-1} \sum_{j=0}^{N-1} \left{ m_i(\Delta x, \Delta y) - \bar{m} \right} \left{ z_j - \bar{z} \right}
$$
其中mi (Δx, Δy)表示在偏移量(Δx, Δy)处地图的预期红外反射 率,Z表示激光雷达图像的红外反射率,n为搜索位置的数 量。该方程描述了如图2d所示的地图图像中模板在每个访问 位置的匹配得分。
为了持续建模匹配分布中的变化,使用(4)引入了先验 后验概率Pt−1(i, j) 。
$$
P_t(\Delta x, \Delta y) = \eta \sum_{i,j} P_{t-1}(i, j) \exp\left(-\frac{(\Delta x - i)^2 + (\Delta y - j)^2}{2\sigma^2}\right)
$$
其中,η是归一化常数,P̅t(Δx, Δy) 是当前车辆位姿的预测 后验概率, σi是如图2e所示的误差协方差。最后,将预测 后验概率和图像匹配概率两项相乘,以估计当前后验概率 Pt(Δx, Δy),如(5)式和图2f中所述。
$$
P_t(\Delta x, \Delta y) = \beta P_{t-1}(\Delta x, \Delta y) + \gamma R(\Delta x, \Delta y) \cdot \bar{P}
t(\Delta x, \Delta y)
$$
其中 β和 γ是用于防止似然分布过于平滑的常数。后验概 率应具有尖锐且稳定的特性,以便可用于通过(6)计算偏移量Δxt,DR 。
$$
\Delta \mathbf{x}
{t,\text{DR}} = \sum_{\Delta x, \Delta y} P_t(\Delta x, \Delta y) \cdot [\Delta x, \Delta y]^T
$$
因此,应用公式(2),并如图2c所示估计车辆位置,即激 光雷达图像根据估计的位置与地图图像重叠。
III. 问题与拟议改进方案
上一节所述系统已于2015/2016年在日本珠洲市进行 了评估。在冬季,我们首次获准在日本恶劣天气条件下进 行自动驾驶测试,例如雪天、雨天和湿滑地面环境。然而, 由于激光雷达图像质量较低以及雪线的出现,系统性能非 常不稳定。在接下来的小节中,这两个问题将被详细解释。 相应的提议解决方案。
A. 通过增加密度提高激光雷达图像质量
激光雷达帧是稀疏的,且不能处于相同的 由于处理时间和车速的影响,自动驾驶过程中地图图 像的分辨率受到限制。为了增强实时环境描述,系统会累 积一定数量的帧,并创建一个最近L帧的堆栈,同时进行 更新。从技术上讲,激光雷达图像具有固定的尺寸,且必 须解决数据关联问题,即累积的激光雷达图像是由先前累 积的图像(如图3a所示)和当前激光雷达帧(如图3b所示) 共同贡献生成的。因此,在添加当前激光雷达帧之前,必 须从先前累积的图像中删除堆栈中最后一帧(如图3c所示) 的贡献。由于车辆在L帧期间的速度可能发生变化,需根 据最后一帧中的车辆位姿来删除相应的像素值。因此,还 会创建并更新L帧内车辆位姿的堆栈。该技术操作尤其应 用于新累积图像的每个像素,因为最后一帧可能仅与当前 帧共享少量像素(而非全部),如图3d所示。图3e展示了 上述策略,并显示了累积的激光雷达图像。与图3f中对应 的预定义地图图像相比,可以观察到累积图像在外观、纹 理和上下文方面相对于图3b中的当前帧有显著提升。

B. 使用PCA提高激光雷达图像质量
使用(5)表示的系统对图像模式和纹理中的特定变化非常 敏感。基于激光雷达的定位系统在潮湿地面和雨天环境中效 果不佳,因为激光束的反射率变得非常弱。因此,激光雷达 图像中的许多预期区域与地图图像相比出现失真。此外,积 雪/潮湿区域的对比度高于或低于地图图像中的对应区域。 地图图像中的对应区域。这会加剧匹配计算R(Δx, Δy)中的 强度差异影响,从而导致获得不正确的偏移量 Δxt,DR 。为了提高系统性能并实现更鲁棒的匹配计算,采用主成分分 析(PCA)利用地图图像重建激光雷达图像。该改进步骤 旨在恢复部分缺失区域,并调整激光雷达图像的强度水平, 使其与地图图像的强度水平最佳对齐。
主成分分析(PCA)已被用于解决图像处理中的各种 问题,包括数据降维[14], 、形状建模与重建[15], 、模式 分析[16], 、目标分类与检测[17]以及图像重建[18]。其原 理是将M个向量表示为N维空间中的点。空间中的点分布 在向量间的方差基础上增加。通过拟合一个新的坐标系 (称为特征空间)以最大化变化编码,可以高效地描述点 分布。从本文的角度来看,特征空间提供了两个优势。第一,可以通过前几个特征向量获得M个向量中最大变化的 方向。因此,可通过使用这些少量特征向量重建向量来滤 除噪声。此步骤使重建向量的强度水平与M个向量保持一 致。第二,可通过将数据投影到特征空间,并根据每个特 征向量中的编码方差调整越界投影来优化模式。此步骤可 恢复缺失值,并将错误的模式逼近至M个向量中的模式。
上述解释将在下一节中进行数学化阐述。 地图图像(如图4a所示)被划分为M个块,每个块的 尺寸为N×N。每个块被转换成包含像素强度值的N2维向 量。均值向量I通过公式(7)计算得出,并相应地将向量转 换为零均值向量I′ 。
$$
\mathbf{I}’ = \mathbf{I} - \bar{\mathbf{I}}, \quad \bar{\mathbf{I}} = \frac{1}{M} \sum_{i=1}^{M} \mathbf{I}
i
$$
将转换后的向量排列成矩阵Θ ,并使用(8)计算相应 的协方差矩阵C。协方差矩阵表示向量中像素间的关系相 对于其位置的特性。
$$
\mathbf{C} = \frac{1}{M} \mathbf{\Theta}^T \mathbf{\Theta}, \quad \mathbf{\Theta} = [\mathbf{I}_1’, \mathbf{I}_2’, \ldots, \mathbf{I}_M’]
$$
然后通过求解(9)计算协方差矩阵的特征向量,并得到相应 的特征值λ ,如图4b所示。
$$
\mathbf{C} \mathbf{\Omega} = \lambda \mathbf{\Omega}
$$
其中Ω是特征向量矩阵。通过使用(10)对特征向量进行加 权线性组合,可以恢复向量/块。权重包含在投影向量B中, 该向量表示投影向量在特征空间中的位置。
$$
\mathbf{I}
{\text{reconstructed}} = \bar{\mathbf{I}} + \mathbf{\Omega} \mathbf{B}
$$
方程(10)是特征空间方程,用于建模M个地图块(地图图 像)中的模式和强度值。
为了增强图4c中的在线激光雷达图像质量,将图像划分 为S<<M个块,每个块的尺寸为NxN,并将其转换为S个向量。 每个向量被投影到特征空间中,以使用(11)确定其位置。
$$
\mathbf{B} = \mathbf{\Omega}^{-1} (\mathbf{I} - \bar{\mathbf{I}})
$$
通过检查每个特征向量对应的特征值λ i 的投影来修正位置。 相应地,将越界投影校正到 ±3√λi 范围内,以获得规则的 高斯分布。然后使用(10)和校正后的投影向量重建块,如 图4d所示,适用于所有块。接着计算地图与重建的激光雷 达图像之间的图像匹配概率(3)。
C. 用于减小雪线效应的边缘匹配
(5)中表示的系统也已产生在某些情况下,尤其是在长距离内匹配概率 Ri( Δx, Δy) 持续错误时,会出现不稳定性能。因此,先验概率Pt−1的误差不断累积,导致车辆突然发生横向偏差。造成这种情况的主要原因是地图图像与实际环境条件之间的道路模式存在差异。由于车辆运动形成雪线,这些雪线通常出现在车道内部以及车道线外侧,例如等待区和应急区。在激光雷达图像中,雪线的表现形式与车道线相似,如图1b所示。这些线条会扭曲预期道路模式,并增加与地图图像相比的相似区域出现概率。因此,使用(3)进行图像匹配计算可能会导致车辆横向定位偏向积雪线。为了使系统对环境变化更具鲁棒性,引入了边缘匹配。车道线和道路边缘更加静态,受环境条件变化的影响较小。这些边缘特征通过在地图和激光雷达图像上应用Sobel滤波器提取[19]。所提取边缘的强度E(u, v)和方向θE(u, v)由(12)获得。
$$
E(u, v) = \sqrt{E_U^2 + E_V^2}, \quad \theta_E(u, v) = \arctan\left(\frac{E_V}{E_U}\right)
$$
其中 EU和 EV分别为 u和 v方向上的梯度分量。图5a和 5b显示了一幅地图图像及对应的边缘强度,即边缘图像。与车辆航向方向平行的边缘对于横向控制非常重要。因此,根据梯度方向θE对边缘图像进行滤波,以编码小于20度的边缘,如图5c所示。通过公式(13)计算滤波后图像EU′(u, v)每一行 v中关于边缘数量N(v)的平均值 HMap。
$$
H_{\text{Map}}(v) = \frac{1}{N(v)} \sum_{i=0}^{N(v)-1} E_U’(u_i, v)
$$
因此,如图5d所示创建地图的边缘轮廓,并类似地获得图5e中激光雷达图像的边缘轮廓HObs(v),如图5f所示。然后计算地图与激光雷达轮廓之间的边缘匹配REdge(vc),并通过 η使用(14)进行归一化,以表示相似程度,如图5g所示。
$$
R_{\text{Edge}}(v_c) = \eta \sum_{v} H_{\text{Map}}(v) \cdot H_{\text{Obs}}(v + v_c)
$$
边缘匹配轮廓是一个列向量,而由(3)生成的图像匹配是一个矩阵。因此,边缘匹配轮廓通常在壳体中传播矩阵 Rt,Edge(Δx, Δy) 与图5h中所示的RImg(Δx, Δy)尺寸相同。基于条件独立性假设,边缘匹配和图像匹配概率与公式(15)中的先验概率结合,以估计车辆位姿的后验概率。然后分别按照公式(6)和(2)的相同步骤计算偏移量和车辆的实际位姿。
$$
P_t(\Delta x, \Delta y) = \eta P_{t-1}^\alpha(\Delta x, \Delta y) R_{t,\text{Image}}^\beta(\Delta x, \Delta y) R_{t,\text{Edge}}^\gamma(\Delta x, \Delta y)
$$
IV. 设置与平台
图6a显示了操作平台。该车辆配备了多种传感器和设备。安装在车顶的Velodyne HDL‐64E S2激光测距雷达 LIDAR具有64个独立光束,通过旋转生成三维点云以描述车辆周围环境。Applonix POS‐LV 220组合式 GNSS/IMU用于接收GPS数据,并测量速度、加速度和旋转角度。相机系统用于图像处理和计算机视觉应用。车身分布有十二个全向雷达,用于扫描180米范围内的远距离区域。传感器的输出被传送到安装在后备箱中的中央处理单元。该处理单元配备有运行频率为3.40 GHz的 Intel‐CoreTM i7‐6700 CPU以及8GB内存,操作系统为 Windows‐7。64X和定位系统使用VS‐2010 C++和OpenCV库进行编码。自动驾驶系统包含多个模块,例如融合感知器、目标检测与跟踪、交通信号检测与识别、路径规划、轨迹预测器、定位、建图等。
地图数据是在良好天气条件下,通过在不同环境(包括城市、乡村和山区)的道路人工驾驶采集的。激光雷达的点云被累积,并在30厘米高度处移除了建筑物和汽车等动态与静态物体。随后通过后处理操作生成地图,以确保精确的细节整合。因此,获得了将路面编码的二维地图,如图6b所示。每个地图块的尺寸为64×64 m²图像域中由 256×256像素表示的大小。
改进系统已在日本珠洲市和金泽市进行了测试和评估。政府允许的最高车速为60公里/小时。本文展示的结果和图像获取于以下时间段:2016年26th‐27th月和30th‐31st月在珠洲市,以及2017年27th月和3rd月在金泽市。这些天的天气频繁出现下雪和下雨的情况,路面潮湿且许多区域被积雪覆盖,即某些道路段出现了长条状积雪。因此,在自动驾驶过程中遇到了各种复杂情况。激光雷达数据包以 10赫兹的频率发送,GNSS/IMU测量数据以100赫兹的频率获取。因此,我们使用提出的方法在0.1秒的时间范围内持续更新车辆位姿。在线累积激光雷达图像包含L=10帧,覆盖 32×32 m²,即图像域中的192×192像素。显然,图像匹配计算了 64×64次,并采用傅里叶变换高效地减少了处理时间[20]。
激光雷达和地图图像被划分为尺寸为16×16像素的块。这些地图块用于创建特征空间,以编码大约总方差的75%。该百分比由可变数量k的特征向量取决于每幅地图图像。由于处理时间的限制,我们将k约束为小于9。然而,发现七个特征向量足以解释所需方差。激光雷达块被投影到特征空间中,并按照第三节所述进行校正。全球导航卫星系统和实时动态定位(RTK)测量结果被存储为真实值,以比较和评估提出的方法的结果。
 操作平台。 (b) 二维高精度地图)
操作平台。 (b) 二维高精度地图)
V. 结果与讨论
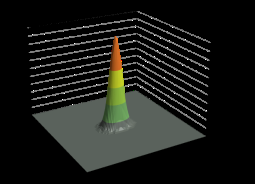
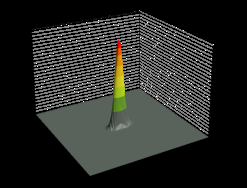
在线累积激光雷达帧是一种独特的思路,因为在之前的大多数研究中仅使用单帧或点云来实现车辆定位[21]。这种方法提供了对环境的稀疏表示。因此,研究人员通常倾向于从点云中提取某些特征,或使用迭代最近点(ICP)来匹配地图图像[22]。相比之下,所提出的累积策略使得在线激光雷达图像更加稠密,并且在强度水平和外观上与地图图像更具兼容性。因此,匹配操作在衡量道路结构相似性方面变得更加鲁棒。图7a和7b分别展示了使用一个激光雷达帧和十个累积帧的匹配结果。相应的概率分布在图7c和7d中给出。匹配概率R(Δx, Δy)表明,使用累积的激光雷达图像可获得更优的概率分布,即累积图像能够正确地与地图图像重叠,并根据最大匹配得分的位置R(Δx, Δy)匹配道路结构。这得益于增强了道路上下文表示,并编码了更多环境细节,如道路标线地标和周围结构。
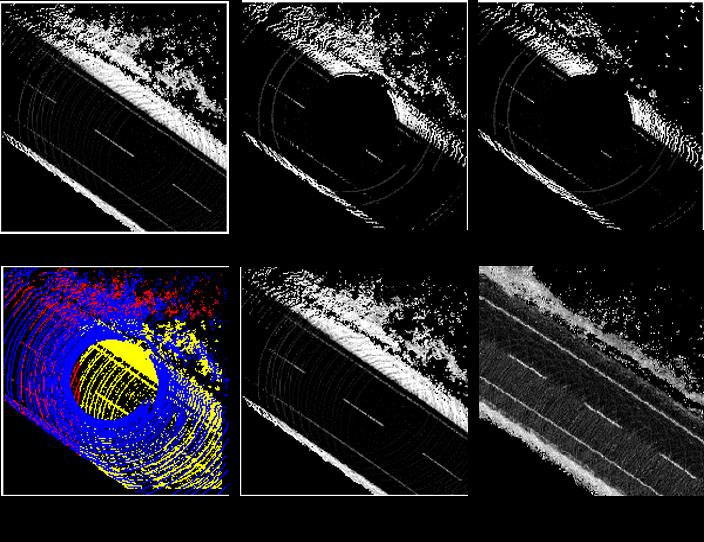
图8展示了一些使用主成分分析(PCA)进行图像增强的样本。图8a和8b分别展示了使用原始激光雷达图像和重建的激光雷达图像与地图图像进行匹配的结果。相应的匹配分数显示在图8c和8d中。图8中的第一和第二例表明,使用原始由于湿滑路面和路边积雪外观导致图像质量下降。重建图像相对于地图图像提供了正确的位置,因为强度水平得到了增强,并且部分与道路环境相关的缺失区域得以恢复。第三种情况显示了原始激光雷达图像和重建的激光雷达图像获得相同的正确匹配结果。然而,使用重建的激光雷达图像对应的匹配分布表现出更优的评分,仅产生一个唯一选取,而使用原始激光雷达图像则出现多个选取。这些峰值被视为噪声,可能影响式(15)中后验概率的整体计算。此外,该情况表明当原始激光雷达图像具有高质量时,该重建策略具备良好的可扩展性,可普遍应用。
(8)中的协方差矩阵C表达了块中像素间的关系。这类计算模型针对像素位置对几何结构和纹理模式进行建模。由于地图图像仅表示路面,这两个建模组件主导了特征空间。因此,前几个特征向量足以表达每幅地图图像中总方差的75%,如图4b所示。每个特征值代表编码特征的高斯分布边界。这为定位系统提供了泛化能力,使其能够无需更改即可重建具有合法结构但纹理不同的激光雷达块。此外,重建的激光雷达图像在模式和强度水平方面被确保尽可能与地图图像相似。
图9通过展示特征向量及其对应地图图像强调了前述讨论。这些图像代表了具有不同航向角和结构的一些道路段。可以观察到,前几个特征向量几乎描述了像素分布的相同主导模式。这表明将地图图像划分为更小的块在充分编码弯道和直道路段、覆盖广泛的环境变化以及相应重建激光雷达图像方面具有鲁棒性。
 地图图像,表示在不同航向角下的不同道路结构。(b) 特征向量)
地图图像,表示在不同航向角下的不同道路结构。(b) 特征向量)
图10a显示了用于创建特征空间并重建图10b中激光雷达图像的地图图像。重建块被最近的地图块所替换如图10c所示的生成的特征空间。通过该图像可以强调两个事实:第一,激光雷达图像中的许多块由同一地图块表示。这是由于特征空间具有区分激光雷达图像中相似区域的泛化能力。第二,不同的地图块有助于在激光雷达图像中形成车道线。这表明其具备理解地图上下文的能力。因此,(3)中的图像匹配对激光束在湿滑路面上反射率变化更具有鲁棒性。
 地图图像。(b) 重建的激光雷达图像。(c) 由地图块替换的激光雷达图像)
地图图像。(b) 重建的激光雷达图像。(c) 由地图块替换的激光雷达图像)
边缘轮廓为车辆横向控制提供了非常重要的信息。由于地图数据通常是在良好天气条件下采集的,因此地图边缘轮廓应能以主导且尖锐的峰值表示车道线和道路边缘。另一方面,积雪线会在激光雷达轮廓中产生额外的峰值。根据地图轮廓中峰值的数量及其之间的距离,可以利用(14)显著降低积雪的影响。从信号处理的角度来看,地图和激光雷达边缘轮廓可被视为具有某些共同属性的两个信号。由一些峰值表示的雪线在激光雷达轮廓中被视为噪声。由于共同特征预期将在匹配计算中占据主导地位,因此噪声的外观(在一定范围内)可以被滤除。
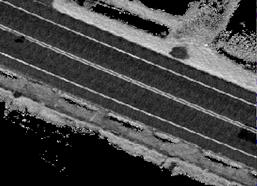
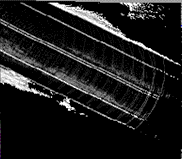
图11通过展示三种积雪形态的情况,说明了在定位系统中引入边缘匹配计算的有效性。每种情况均详细展示了图11a中的前视摄像头图像、图11b中的图像匹配概率(3)、图11c中的图像匹配结果、图11d中的边缘匹配概率(14),即红色表示地图轮廓,蓝色表示激光雷达轮廓,多种颜色表示匹配轮廓,以及图11e中的边缘匹配结果。第一种情况显示了路边积雪且路面存在冰冻层。该冰冻层影响激光雷达反射率并提高了强度水平,导致图像匹配结果产生约3米的横向偏移,而边缘匹配则将此情况恢复至12厘米。第二种情况显示湿滑路面,车道线旁边有雪段,这些雪段改变了路面图案,导致侧边车道线与地图图像中的中间线发生匹配。相比之下,该情况通过边缘匹配得以恢复。第三种情况显示路边有积聚的雪段以及车道内出现两条雪线,雪线对图像匹配结果造成显著的横向偏移。这些线条在图11d的激光雷达轮廓(蓝色)中由两个噪声峰值表示。通过计算激光雷达轮廓与地图轮廓之间车道线的公共峰值进行边缘匹配,从而消除了这些影响。因此,边缘匹配正确地定位了车辆,如图11e所示。
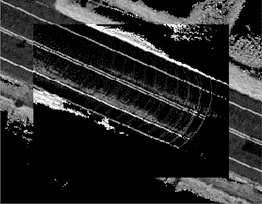
图12显示了由于积雪线的存在,于1st2016年3月发生的一个关键情况。车辆在靠近路边护栏的雪线附近被拉向雪线两次。使用旧系统(5)时横向误差约为1.2米,而使用改进系统(15)时已显著降低至14厘米。因此,改进措施提高了定位系统的稳定性和平滑性。
如果车辆发生横向偏移,则可以推断出所提出的改进措施也显著提高了纵向方向的定位精度。此外,改进系统在应对环境变化方面表现出色。图13突出展示了将图13a和图13b中的草地和植被区域变为图13c中的铺装地面的示例。如图13d所示,旧系统在对向车道产生了错误的横向估计,而改进系统准确地估计了车辆位姿,如图13e所示。两个系统在该区域的误差曲线如图13f所示。这表明改进系统具有可扩展性,能够在不同天气条件的各种环境中鲁棒地工作。
在总体评估中,改进系统平均实现了20厘米的横向定位误差在雪地环境和湿滑路面上自主驾驶存在许多困难情况。此外,在天气良好的正常天气下,横向误差小于15厘米。因此,该系统具有很强的兼容性和鲁棒性,适用于不同环境条件下的自动驾驶。
VI. 结论
本文重点研究了在湿滑和雪地环境中使用概率方法实现自动驾驶的问题。通过采用帧累积策略,增加了在线激光雷达图像的密度。这一独特思路通过增强道路结构和上下文的表示,使图像匹配更加鲁棒。利用主成分分析(PCA)重建激光雷达图像,提高了图像质量,并恢复了由于激光雷达在湿滑路面上反射率较弱导致的缺失区域。要正确重建激光雷达图像,必须满足两个条件:第一,重建过程必须在增强强度水平的同时保留未受影响区域的结构模式;第二,必须根据地图上下文恢复缺失区域。主成分分析通过构建一个对地图结构和像素分布进行建模的特征空间,满足了这两个条件。该空间的泛化能力为地图特征提供了更好的解释。此外,引入了一种边缘匹配技术,以提高车辆在横向方向定位的鲁棒性。设计了边缘轮廓以编码最重要的特征,从而在存在积雪线的情况下提供稳定性能。通过基于地图边缘轮廓中峰值的数量和距离滤除其峰值,有效降低了积雪线的影响。此外,已证明当图像匹配无法实现车辆定位时,边缘匹配能够恢复匹配误差。提出的方法在60公里/小时速度下获得的横向误差约为20厘米。该误差在恶劣天气条件下进行自动驾驶是可靠的。

















 911
911

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









