




在点云处理中,Open3D常见的去噪方法包括:
a. 统计滤波(Statistical Outlier Removal)
基于每个点的邻域点距离分布,移除远离大多数点的“孤立”点,适用场景:
- 适用于点云数据中存在随机分布的噪声点的情况。
- 特别适合于具有相对均匀密度的点云数据集。
- 当你希望保留尽可能多的有效点而仅去除明显偏离的孤立点时非常有用。
b. 半径滤波(Radius Outlier Removal)
移除那些在指定半径范围内邻居数量不足的点,适用场景:
- 更适合用于点云中包含明确结构或特征的场景,如建筑物、道路等,其中预期大多数点都有紧密相邻的邻居。
- 当你知道点云的大致密度并且想要去除那些几乎没有邻居的孤立点时特别有效。
这两种方法都是 Open3D 提供的高效点云去噪手段。

✅ 方法一:统计滤波(Statistical Outlier Removal)
# 统计滤波参数:
# - nb_neighbors: 每个点用于计算距离的邻域点数
# - std_ratio: 标准差倍数,决定离群值的阈值
cl, ind = filtered_pcd.remove_statistical_outlier(nb_neighbors=20,
std_ratio=2.0)
# 只保留内点(inliers)
filtered_pcd_clean = filtered_pcd.select_by_index(ind)
参数解释:
nb_neighbors: 通常设置为 10~50,取决于点云密度。std_ratio: 越大越宽松,越小越严格,常用值是 1.0~2.5。
✅ 方法二:半径滤波(Radius Outlier Removal)
# 半径滤波参数:
# - nb_points: 在给定半径内必须存在的最小点数
# - radius: 邻域搜索半径
cl, ind = filtered_pcd.remove_radius_outlier(nb_points=10, radius=0.05)
# 只保留满足条件的点
filtered_pcd_clean = filtered_pcd.select_by_index(ind)
参数解释:
radius: 点周围搜索邻居的距离范围,单位与点云一致(如米、毫米等)。nb_points: 该范围内至少要包含多少点才被认为是有效点。
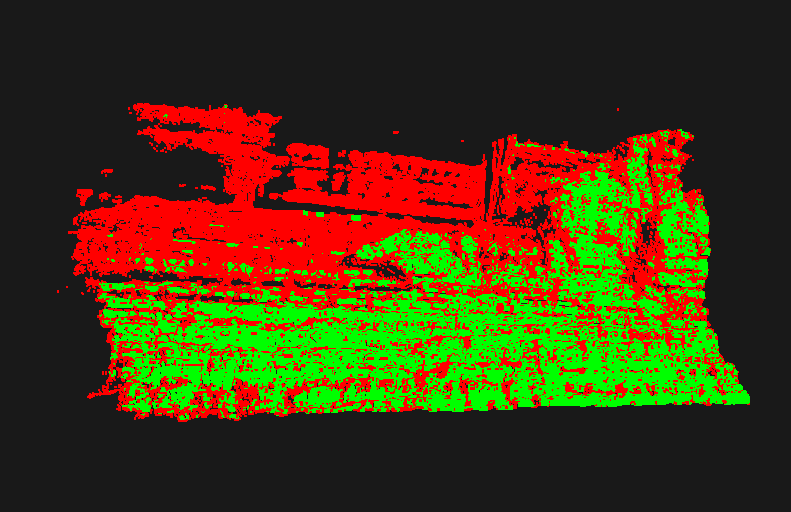
🔍 可视化去噪结果
你可以将原始点云和去噪后的点云分别显示出来对比效果:
vis = o3d.visualization.Visualizer()
vis.create_window(window_name="Noisy vs Cleaned Point Cloud")
# 设置渲染选项
render_opt = vis.get_render_option()
render_opt.point_size = 2.0
render_opt.background_color = [0.1, 0.1, 0.1]
# 将两个点云加入可视化器(可选不同颜色区分)
filtered_pcd.paint_uniform_color([1, 0, 0]) # 原始点云红色
filtered_pcd_clean.paint_uniform_color([0, 1, 0]) # 去噪后绿色
vis.add_geometry(filtered_pcd)
vis.add_geometry(filtered_pcd_clean)
vis.run()
vis.destroy_window()
📦完整代码
import open3d as o3d
import numpy as np
def StatisticalOutlierRemoval(filtered_pcd):
"""
统计滤波参数:
- nb_neighbors: 每个点用于计算距离的邻域点数
- std_ratio: 标准差倍数,决定离群值的阈值
"""
cl, ind = filtered_pcd.remove_statistical_outlier(nb_neighbors=10,
std_ratio=1)
# 只保留内点(inliers)
filtered_pcd_clean = filtered_pcd.select_by_index(ind)
return filtered_pcd_clean
def RadiusOutlierRemoval(filtered_pcd):
"""
半径滤波参数:
- nb_points: 在给定半径内必须存在的最小点数
- radius: 邻域搜索半径
"""
cl, ind = filtered_pcd.remove_radius_outlier(nb_points=10, radius=10)
# 只保留满足条件的点
filtered_pcd_clean = filtered_pcd.select_by_index(ind)
return filtered_pcd_clean
if __name__ == "__main__":
# 读取点云数据
pcd = o3d.io.read_point_cloud("demo.ply") # 替换为你的点云文件路径
# 将点云数据转化为numpy数组
points = np.asarray(pcd.points)
colors = np.asarray(pcd.colors) # 获取颜色数据
# 筛选Z轴小于设定阈值的点及其对应的颜色
mask = (points[:, 2] > 500) & (points[:, 2] < 3000)
filtered_points = points[mask]
filtered_colors = colors[mask]
# 交换X轴和Y轴的数据
filtered_points[:, [0, 1]] = filtered_points[:, [1, 0]]
# 创建新的点云对象并赋值筛选后的点和颜色
filtered_pcd = o3d.geometry.PointCloud()
filtered_pcd.points = o3d.utility.Vector3dVector(filtered_points)
filtered_pcd.colors = o3d.utility.Vector3dVector(filtered_colors)
# 点云滤波
print("过滤前:",len(filtered_pcd.points))
# filtered_pcd_clean = StatisticalOutlierRemoval(filtered_pcd)
filtered_pcd_clean = RadiusOutlierRemoval(filtered_pcd)
print("过滤后:",len(filtered_pcd_clean.points))
# 可视化前的配置
vis = o3d.visualization.Visualizer()
vis.create_window()
# 设置背景颜色,参数为RGB三元组,范围0-1
opt = vis.get_render_option()
opt.background_color = [0.1, 0.1, 0.1] # 深灰色背景
# 设置点的大小
opt.point_size = 2.0 # 根据需要调整大小
# 将两个点云加入可视化器(可选不同颜色区分)
filtered_pcd.paint_uniform_color([1, 0, 0]) # 原始点云红色
filtered_pcd_clean.paint_uniform_color([0, 1, 0]) # 去噪后绿色
vis.add_geometry(filtered_pcd)
vis.add_geometry(filtered_pcd_clean)
# vis.add_geometry(filtered_pcd)
# 运行可视化器
vis.run()
vis.destroy_window()
过滤前: 203416
过滤后: 89548
🧠 补充建议
- 如果点云密度不均匀,可以先对点云进行 下采样(Voxel Downsample) 再去噪。
- 如果噪点呈现簇状或线状结构,也可以考虑使用 欧式聚类分割(Cluster DBSCAN) 来识别并移除噪声簇。
- Open3D 的去噪函数默认返回一个布尔掩码(index),可以通过
select_by_index()提取干净点云。

















 902
902

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









