




1、环境准备
pip install numpy opencv-python glob2 pyyaml
上面是 Python 中常用的库:
-
numpy:
- 功能: 用于科学计算,提供高效的数组操作和数学函数。
- 用途: 处理多维数组、矩阵运算、线性代数、傅里叶变换等。
-
opencv-python:
- 功能: 用于计算机视觉和图像处理。
- 用途: 图像和视频处理、对象检测、特征提取、摄像头输入等。
-
glob2:
- 功能: 用于文件路径匹配。
- 用途: 查找符合特定模式的文件路径,常用于批量处理文件。
-
pyyaml:
- 功能: 用于解析和生成 YAML 文件。
- 用途: 读取和写入 YAML 配置文件,适合存储和传输结构化数据。
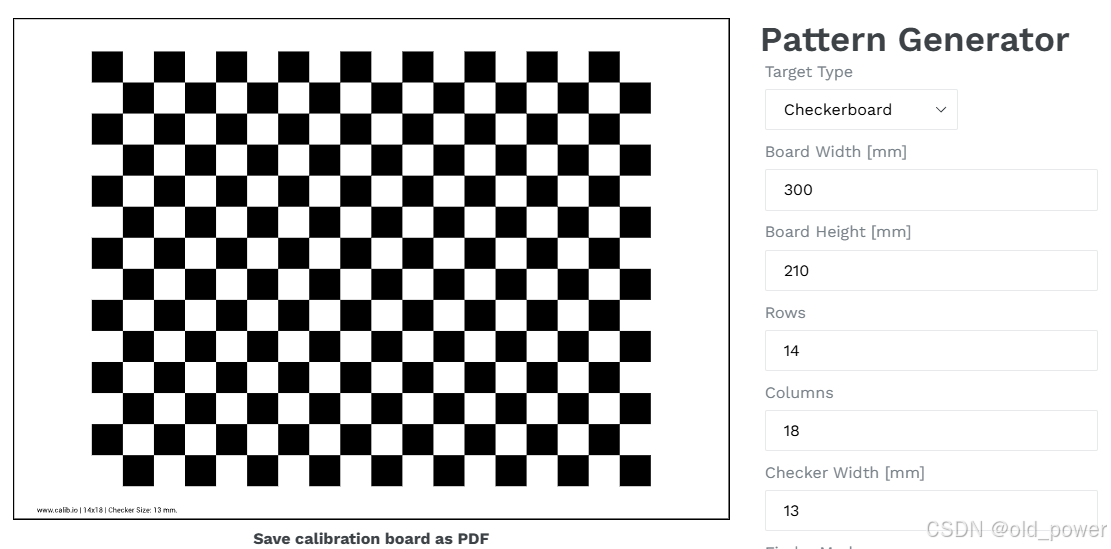
2、准备棋盘格
https://calib.io/pages/camera-calibration-pattern-generator
- 下图刚好是一张A4纸大小,14x18的格子,将棋盘格另存为PDF:
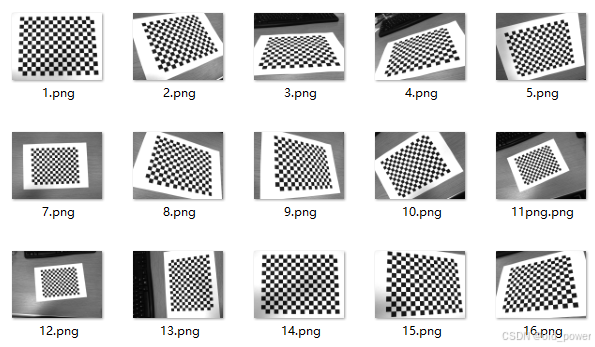
- 使用需要标定的相机进行拍照,多拍一些不同角度的,例如下面这样:
3、标定代码
3.1Python代码实现如下:
import numpy as np
import cv2
import glob
import yaml
# ==================== 可修改参数 ====================
# 棋盘格尺寸 (行数, 列数) - 指的是棋盘格的方格数量
CHESSBOARD_SQUARES = (18, 14)
# 角点检测精度参数
CRITERIA = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# 图片文件类型
IMAGE_FORMAT = 'access/image/*.png'
# 校准结果保存文件名
OUTPUT_FILE = "access/calibration_matrix.yaml"
# ================================================
def main():
# 计算内部角点的数量
chessboard_size = (CHESSBOARD_SQUARES[0] - 1, CHESSBOARD_SQUARES[1] - 1)
# 准备对象点,例如 (0,0,0), (1,0,0), ..., (16,12,0)
objp = np.zeros((chessboard_size[0] * chessboard_size[1], 3), np.float32)
objp[:, :2] = np.mgrid[0:chessboard_size[0], 0:chessboard_size[1]].T.reshape(-1, 2)
# 用于存储所有图片的对象点和图像点
objpoints = [] # 3D 点在真实世界空间
imgpoints = [] # 2D 点在图像平面
# 获取所有符合格式的图片路径
images = glob.glob(IMAGE_FORMAT)
found = 0 # 记录找到的有效图片数量
for fname in images:
img = cv2.imread(fname)
if img is None:
print(f"无法读取图片: {fname}")
continue
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 查找棋盘角点
ret, corners = cv2.findChessboardCorners(gray, chessboard_size, None)
if ret:
objpoints.append(objp)
# 提高角点检测精度
corners2 = cv2.cornerSubPix(gray, corners, (11, 11), (-1, -1), CRITERIA)
imgpoints.append(corners2)
# 在图片上绘制角点
img = cv2.drawChessboardCorners(img, chessboard_size, corners2, ret)
found += 1
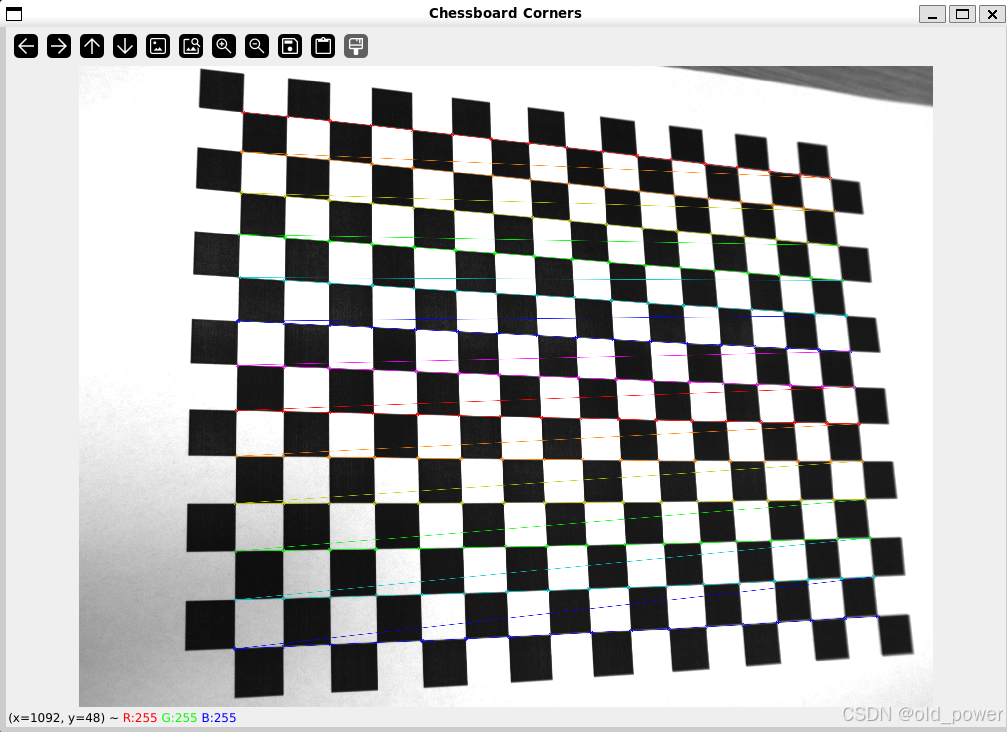
# 显示检测结果
cv2.imshow('Chessboard Corners', img)
cv2.waitKey(500)
# 如果需要保存带有角点的图片,可以取消以下注释
# output_image_name = f'calibresult_{found}.png'
# cv2.imwrite(output_image_name, img)
else:
print(f"未找到棋盘角点: {fname}")
cv2.destroyAllWindows()
print(f"用于校准的图片数量: {found}")
if found < 1:
print("没有找到足够的图片进行校准。")
return
# 进行相机校准
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)
if not ret:
print("相机校准失败。")
return
# 将相机矩阵和畸变系数保存到字典中
calibration_data = {
'camera_matrix': mtx.tolist(),
'dist_coeff': dist.tolist(),
'rvecs': [r.tolist() for r in rvecs],
'tvecs': [t.tolist() for t in tvecs]
}
# 将校准数据写入YAML文件
with open(OUTPUT_FILE, "w") as f:
yaml.dump(calibration_data, f)
print(f"校准完成,结果已保存到 {OUTPUT_FILE}")
if __name__ == "__main__":
# 设置窗口的固定大小
window_name = 'Chessboard Corners'
fixed_window_size = (1000, 700)
# 创建一个空白的图像,大小为固定窗口大小
blank_image = np.zeros(fixed_window_size, np.uint8)
cv2.namedWindow(window_name, cv2.WINDOW_NORMAL)
cv2.resizeWindow(window_name, fixed_window_size[0], fixed_window_size[1])
main()
3.2 标定过程
python calibration_matrix.py
用于校准的图片数量: 15
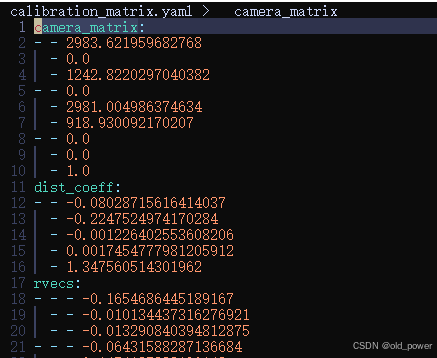
校准完成,结果已保存到 access/calibration_matrix1.yaml
calibration_matrix.yaml中保存相机内参camera_matrix和畸变系数dist_coeff
4、去畸变
- 该函数返回一张去畸变后的图像:
def dedistortion(img,cut:bool):
# 加载校准参数
with open("access/calibration_matrix.yaml") as f:
data = yaml.safe_load(f)
camera_matrix = np.array(data['camera_matrix'])
dist_coeff = np.array(data['dist_coeff'])
# 读取需要去畸变的图像
# img = cv2.imread('1.png')
h, w = img.shape[:2]
# 获取最佳新相机矩阵
new_camera_mtx, roi = cv2.getOptimalNewCameraMatrix(camera_matrix, dist_coeff, (w, h), 1, (w, h))
# 去畸变
undistorted_img = cv2.undistort(img, camera_matrix, dist_coeff, None, new_camera_mtx)
# print(undistorted_img.shape)
if(cut):
# 裁剪图像(可选)
x, y, w, h = roi
undistorted_img = undistorted_img[y:y+h, x:x+w]
# print(undistorted_img.shape)
return undistorted_img

















 1万+
1万+




 到【灌水乐园】发言
到【灌水乐园】发言







