




摘要
本文对Westhofen等人发表在《Archives of Computational Methods in Engineering》期刊上的重要综述论文进行深入精读分析。该论文系统性地回顾了自动驾驶车辆临界度指标的研究现状,提出了一套完整的适用性分析方法,为自动驾驶系统安全性评估提供了重要的理论基础和实践指导。论文不仅整合了数十年来交通冲突研究、交通心理学以及自动驾驶车辆开发测试领域的研究成果,还建立了统一的知识框架,为研究人员和工程师选择合适的临界度指标提供了方法论指导。
1. 引言与研究背景
1.1 研究动机与问题提出
自动驾驶车辆的大规模部署对当今社会的交通模式具有巨大的变革潜力。然而,尽管这一追求已经启动了数十年,在可靠地确保此类车辆在开放环境中安全运行方面仍存在开放性挑战。虽然功能安全是一个成熟的概念,但如何测量车辆行为安全性的问题仍然是研究的主题。
作者通过一个经典的例子——碰撞时间(Time To Collision, TTC)指标来说明问题的复杂性。TTC指标直观地查询动态运动模型(Dynamic Motion Model, DMM)以预测两个参与者之间的碰撞,并计算到该事件发生的时间。
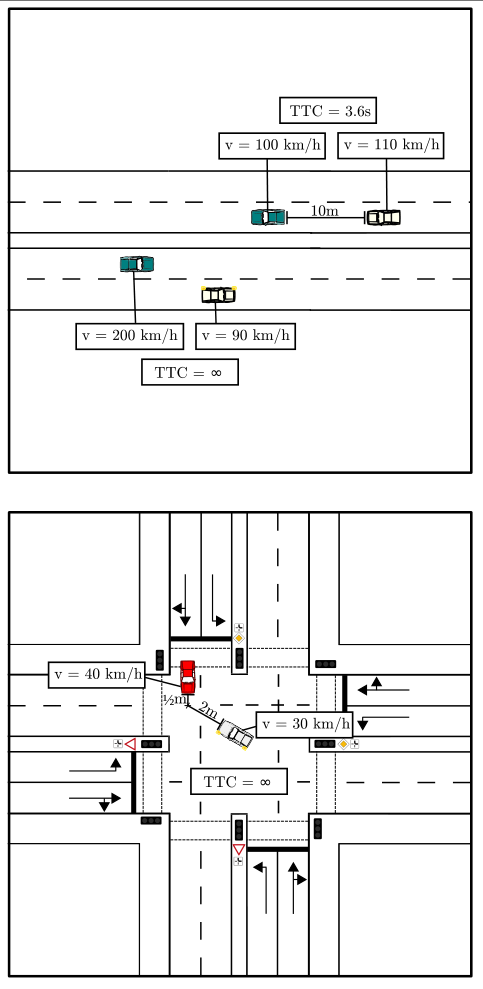
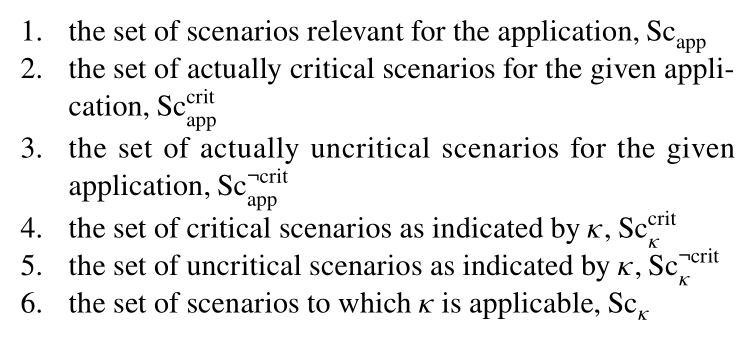
在跟车场景中,TTC可以作为自动紧急制动(AEB)系统的一部分,通过显示其计算值在跟车场景中对前导车辆引起的临界度具有高敏感性,为AEB系统提供关于潜在紧急制动时间接近度的相关信息。然而,当TTC与单点运动学预测模型结合用于评估交叉口场景的临界度时,其有效性大大降低,在许多场景中评估为无穷大。
1.2 核心研究问题
基于上述分析,作者提出了本文要解决的核心研究问题:
"如何识别一组适合在手头应用中计算评估临界度的临界度指标?"
为了回答这个问题,作者提出了两个主要贡献:
- 提供一种指导用户回答这个问题的新方法
- 基于对当前临界度指标现状、使用情况和特征的统一综述来应用这种方法
1.3 问题陈述的形式化
作者将挑战进行了形式化描述,定义了以下相关场景集合:
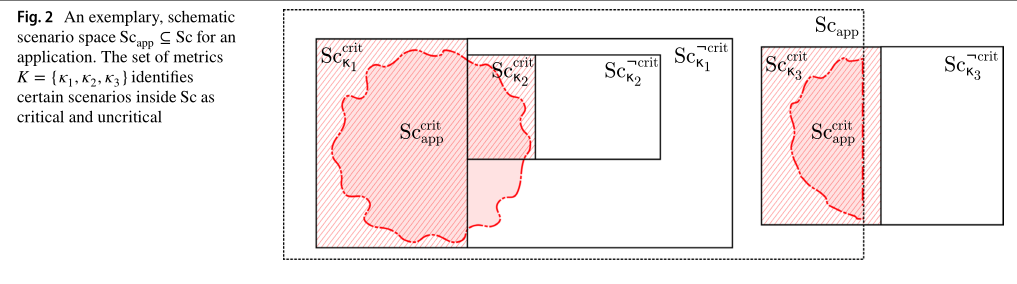
这种形式化描述为后续的适用性分析提供了数学基础。
2. 相关工作综述
2.1 交通安全替代指标的历史发展
安全替代指标的发展和应用已有悠久历史,主要用于研究和分析交通安全。首先,分析交通冲突而非仅仅依赖交通事故的概念在1968年由通用汽车公司推广。从规范意义上讲,在1970年代客观识别和测量此类冲突的基础通过Hayward、Hydén和Allen等人的工作得到了奠定。
专注于交通冲突分析的几项研究回顾了替代指标自那时以来的发展情况。除了回顾安全替代指标外,还存在关于其相关特性(如可靠性和有效性)以及相关要求的讨论。然而,这些研究都没有关注此类指标在车辆自动化领域的应用,这必然会施加不同的视角。
2.2 自动驾驶领域的研究现状
在自动驾驶车辆领域,安全替代指标通常被称为临界度指标。作者已发表的初步综述在本工作中得到了扩展和统一。类似地,自动驾驶社区中存在一些工作涉及某些临界度指标子集,但没有提供对可能选择的广泛回顾。
此外,运动模型在评估场景的未来演化时起着关键作用。在这方面,Lefèvre等人分析了不同抽象级别运动模型在风险评估中的适用性,但主要关注建模方面,对指标的考虑较少。
2.3 研究空白与本文贡献
现有研究存在的主要问题包括:
- 缺乏针对自动驾驶应用的系统性综述
- 各种方法的优缺点没有相互比较
- 没有提供系统性方法来推导合适的指标集合
本文通过提供广泛的综述和方法论框架来填补这些研究空白。
3. 临界度指标的应用场景分析
3.1 应用场景分类框架
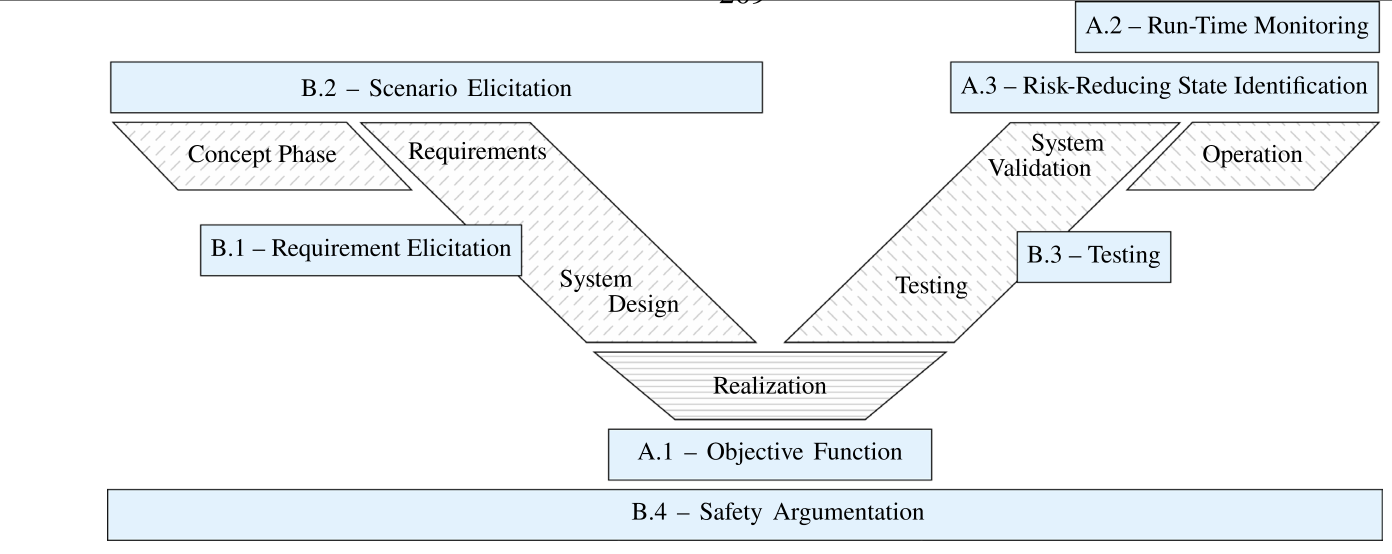
作者基于V模型将临界度指标的应用分为两大类:实现阶段应用和验证确认阶段应用。
3.2 实现阶段应用
3.2.1 目标函数(A.1)
自动驾驶功能可以被表述为涉及效率、舒适性和安全性各种编码约束的函数优化问题。对于安全性,直接或间接最小化临界度指标可以被视为优化安
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 40
40

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











