




 本文深入解析Dijkstra算法,一种用于寻找单源最短路径的经典算法。文章详细介绍了算法的背景、原理及实现步骤,包括如何更新路径表、访问表,并探讨了贪心策略的应用。此外,还提供了双源最短路径及路径数量的求解方法,通过实例讲解加深理解。
本文深入解析Dijkstra算法,一种用于寻找单源最短路径的经典算法。文章详细介绍了算法的背景、原理及实现步骤,包括如何更新路径表、访问表,并探讨了贪心策略的应用。此外,还提供了双源最短路径及路径数量的求解方法,通过实例讲解加深理解。
Dijkstra背景
Dijkstra是研究
- 单源
- 最短
- 路径长度
的算法
且 边长度/权值 不能有负数
注:且大部分题目都以无向边形式呈现
Dijkstra原理解析
Dijkstra的思路是更新2个表,其中有
- mark:标记点是否被访问过
- path:走到每个点的权值/路径
- 其他追加记录:可访问表(略)
写法上
Dijkstra有3个模块;
模块0:设定初始状态
1、visit设定全false 2、path设定全为INT_MAX,起始点为0 3、定义 每次访问的点;最小路经
开始循环:设定最小路经为 INT_MAX
- 模块1——循环1:遍历visit表;找到path表中最小的 点;
- 模块2:更新visit表及其他操作(例如 记录访问的点 等)
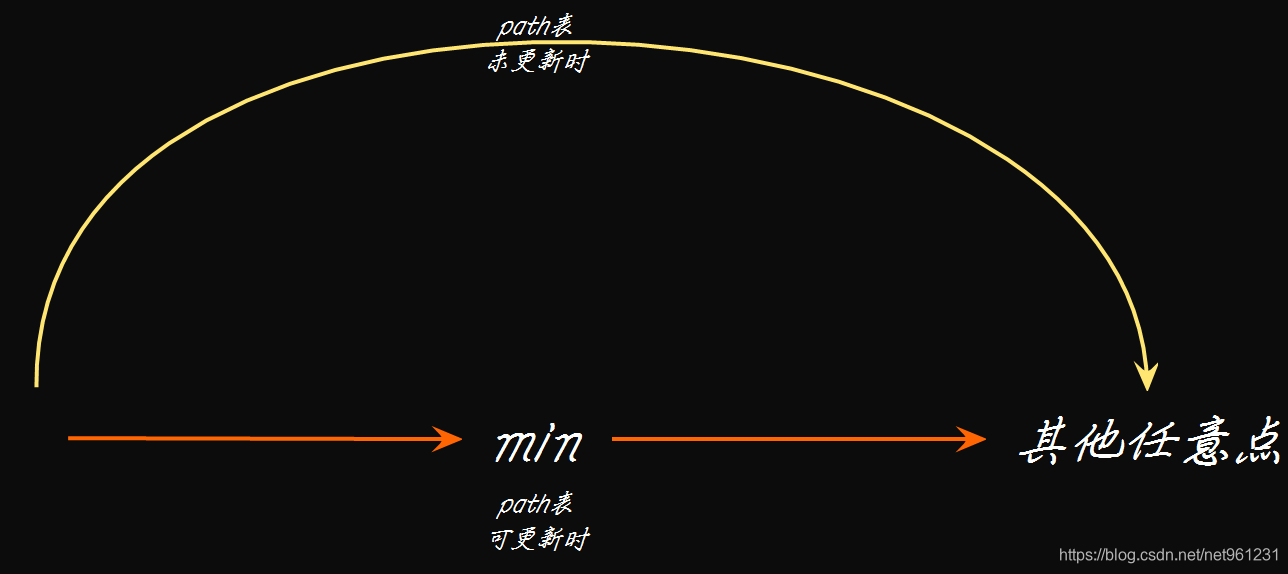
- 模块3——循环2:遍历min的邻接点;更新path表
原因:当走到min点后,可不可能存在:“通过先到min,再到目标点 比 原来直接达到目标点 更短”
若有则更新path表
模块1的追加操作:强化贪心判断(存在先后优先级的多个判断)
操作1的本质:Dijkstra的核心思想——贪心(每次都抓取局部最优解)
操作1:追加点权——要求在同时最短路下,同时判别点权最小/大
for (auto i = visit.begin(); i != visit.end(); ++i) {
if (i->second == false && length[i->first] < min_path) {
min_path = length[i->first];
next = i->first;
}
else if (i->second == false && length[i->first] == min_path) {
if (happy_sum[i->first] > happy_sum[next]) {
next = i->first;
}在操作1的基础上可以进行拓展,追加多个判断
模块2的追加操作:
模块2的本质:在Dijkstra的已找到最优解下,进行记录
即:全局操作
模块3的追加操作:拓展处理双源问题(明确起点和终点)
模块3的本质:当有点可访问时/存在更短的路经时;更新对这个点的一系列状态(所需路经等)
即:局部操作
注:以上操作仍然要全部点访问一遍再跳出Dijkstra,即做一次完整的Dijkstra
而不是访问到终点就跳出
操作1:确定1条双源最短路经
原理:用1个容器,来记录前后关系
具体操作:
初始化:对每个点,与他自身进行线索
例:输入时作如下操作
tree[x] = x;实际过程类似构建1个以起点为根的n叉树
在模块3的循环下添加:(此处以邻接表为例)
for (auto i = graph[u].begin(); i != graph[u].end(); ++i) {
if (visit[(*i).v] == false && (*i).key + length[u] < length[(*i).v]) {
length[(*i).v] = (*i).key + length[u];
tree[(*i).v] = next;//每次有更小路经时,则挂上前驱
}
}最终脱出Dijkstra时,从想要的终点进行逆向线索到起点即可
操作2:确定双源最短路经的条数
原理:用1个容器,来记录访问到该结点的路经数
具体操作:
初始化:对起点start,设置cout[start]=1
在模块3的循环判断 下添加:
在<时追加
path_number[(*i).v] = path_number[u];在==时追加
path_number[(*i).v] += path_number[u];课后练习
PAT 1087 All Roads Lead to Rome
此题网上大部分解都是基于柳神的DFS+Dijkstra
但是可以只用Dijkstra进行破解,考察了贪心法的思路和对点的维护
即 模块1和模块3的追加操作
注:用柳神的办法确实好理解,但是如果能用纯Dijkstra进行破解,定能加深你对Dijkstra本质的理解
注:以上全文都是基于该题,产生的新理解,新总结

















 920
920

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









