




 本文详细介绍了在Ubuntu18.04系统上安装ROS Melodic和kalibr的步骤,包括设置镜像源、安装ROS、测试ROS功能、安装kalibr依赖、编译kalibr源码以及测试kalibr的相机和IMU标定。过程中解决了suiteasparse下载问题和其他编译错误。
本文详细介绍了在Ubuntu18.04系统上安装ROS Melodic和kalibr的步骤,包括设置镜像源、安装ROS、测试ROS功能、安装kalibr依赖、编译kalibr源码以及测试kalibr的相机和IMU标定。过程中解决了suiteasparse下载问题和其他编译错误。
目录
前言
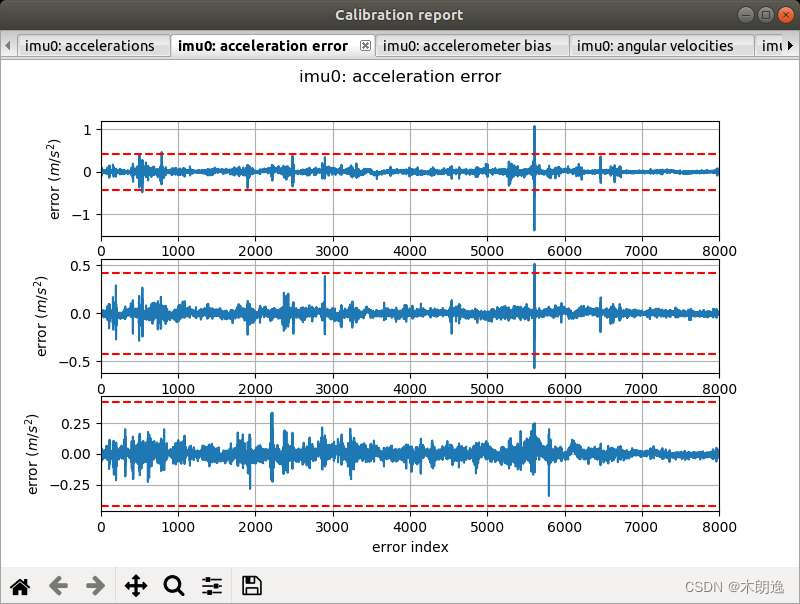
安装编译要我老命啊!经历了与kalibr的漫长而曲折的战斗。终于搞定。先来张成功的结果图打打鸡血!兄弟们,搞起!
一、安装ROS
ROS有多个版本,不同版本的ubuntu系统需要安装对应的ROS,对照如下表:
| ROS版本 | ubuntu版本 |
| indigo | ubuntu14.04 |
| kinetic | ubuntu16.04 |
| melodic | ubuntu18.04 |
| noetic | ubuntu20.4 |
本文以ubuntu18.04+ROS-melodic为例进行安装编译。(该版本使用较多,网上资源多)
注意:如读者安装版本与本文不同,请注意相关命令种将melodic更换成对应版本(kinetic或noetic)。安装步骤大同小异。
1.设置镜像源
如果可以可以科学上网的话,读者可以按照 国外源进行安装:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'设置公钥:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654否则使用国内源进行安装:
中科大源:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
设置公钥:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
上面源不可以的话:可以试试下面的
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
或者
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
设置公钥:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
如果连接到密钥服务器时遇到问题,可以尝试用上一个命令替换hkp://pgp.mit.edu:80或hkp://keyserver.ubuntu.com:80
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6065
6065

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









