



接着上一篇,我们继续讲解B*寻路算法,上一段的代码段,这节我们说一下方向向量,下一节我们对得到的路劲进行进一步优化,最终版的话,下面这段代码其实是没用的,根本不需要沿着障碍爬,但是基础的还是要一步步讲解的
# 返回爬墙路径 和 直线穿透障碍的第一个点,, 传入的是 当前点 {}字典信息 和 前进一步的障碍点坐标元祖 ()
# 点信息 为 {"point":(坐标),”direct“:(指向自己的向量(元祖)),其他自定义信息 }
def obstacle_path(self, cur, obstacle_point: tuple):
# 障碍前的点
temp_point = cur["point"]
# 获取指向终点的向量
direct=self.get_direct(temp_point)
while True:
# 传进来的点,沿着终点方向,穿透障碍,得到可以探索的第一个点 :地图内的任意两点连线都不可能穿过地图边界
end_point = temp_point[0] + direct[0], temp_point[1] + direct[1]
if map_be_search[end_point[0]][end_point[1]] == 0:
break
temp_point = end_point
end_info = {}
end_info["point"] = end_point
# end_info 的direct 需要攀爬过后才能知道
#--------穿透后的点已经好了
# 开始爬墙,先 把障碍周围所有可走的点拿到 为obstacle_path
obstacle_path=self.get_obstacle_path(obstacle_point)
# ----------------第一轮 攀爬-----------
# 这里是零时的 关闭表 ,实际上这里应该的全局关闭表
closeSet=[]
cur_grid = cur # 把传进来的那个点拿来用
while True:
closeSet.append(cur_grid)
# map_be_search[cur["point"][0]][cur["point"][1]] = 5
# print(map_be_search)
# time.sleep(0.5)
# 当前点已经是 穿透后的点了, !!!这里终点已经加入了closeSet 后面有用 !!
if cur_grid["point"] == end_point:
break
# 对当前格相邻的8格中的每一个
neighbors = self.get_neighbors(cur_grid["point"][0], cur_grid["point"][1])
next_point_info = {}
for neighbor in neighbors:
# 该邻居 在障碍周围的可探索点中。 并且没有关闭(走过),则下一个点就是它
if neighbor in obstacle_path and neighbor not in closeSet:
# 计算距离 ==1.4 的是对角的点
distace=self.get_distance(cur_grid["point"],neighbor)
if distace==1:
next_point_info["point"] = neighbor
# 这里记录的的父节点指向自己的向量,也可以改为“parent”:cur["point"],只是用来回溯路劲的
next_point_info["direct"] = self.get_two_point_direct(cur_grid["point"], neighbor)
# 但是对于最初的一个点来说,它的邻居 左右(前进方向)有两个点是符合的,这里打断一下只取一个。所以第二轮的攀爬,虽然是同一个起点,但是却取了另一个分支
break
# 沿着障碍边缘走,前路 要么有且只有一个点可走,要么死路,要么已经到达了穿透后的点
if next_point_info:
cur_grid=next_point_info
else:
break
# -------- 到这里,closeSet记录的是第一条路径的所有点 ----第二轮攀爬 其实就是重复一下 刚好的是初始点的另一个分支--------------
length1 = len(closeSet)
cur_grid = cur # 把传进来的那个点拿来用,用过就关闭,无情
while True:
closeSet.append(cur_grid)
# map_be_search[cur["point"][0]][cur["point"][1]] = 5
# print(map_be_search)
# time.sleep(0.5)
# 当前点已经是 穿透后的点了,
if cur_grid["point"] == end_point:
break
# 对当前格相邻的8格中的每一个
neighbors = self.get_neighbors(cur_grid["point"][0], cur_grid["point"][1])
next_point_info = {}
for neighbor in neighbors:
# 该邻居 在障碍周围的可探索点中。 并且没有关闭(走过),则下一个点就是它
if neighbor in obstacle_path and neighbor not in closeSet:
# 计算距离 ==1.4 的是对角的点
distace = self.get_distance(cur["point"], neighbor)
if distace == 1:
next_point_info["point"] = neighbor
next_point_info["direct"] = self.get_two_point_direct(cur_grid["point"],neighbor) # 这里记录的的父节点指向自己的向量,也可以改为“parent”:cur["point"]
# 但是对于最初的一个点来说,它的邻居 左右(前进方向)有两个点是符合的,这里打断一下只取一个。所以第二轮的攀爬,虽然是同一个起点,但是却取了另一个分支
break
# 沿着障碍边缘走,前路 要么有且只有一个点可走,要么死路
if next_point_info:
cur_grid = next_point_info
else:
break
# ,,如果只有一条路径到达,那么探索过 end_point点只有一个,否则有两个相同的 end_point,但是他们的父节点不一样,回溯路径是不好处理,
lenght2 = len(closeSet)
# 遍历 closeSet 如果坐标点=终点坐标,就拿出它对应的索引
last_index = [closeSet.index(p) for p in closeSet if p["point"] == end_point]
# 为空,两条都死路,,也就是坑爹的 空心障碍,,或者目标终点在里面,一样坑爹
if last_index == []:
return 0
else:
# 有一个就是有一条路,直接返回回就行
if len(last_index) == 1:
return closeSet[last_index[0]]
# ----通过两轮攀爬的 路径长度,, 舍去其中一个 end_point,留下一个即可,不然回溯路劲时,一个点有两个指向自己的向量(两个父节点)
if length1< (lenght2-length1):
closeSet.pop(last_index[1])
return closeSet[last_index[0]]
else:
closeSet.pop(last_index[0])
return closeSet[last_index[1]]
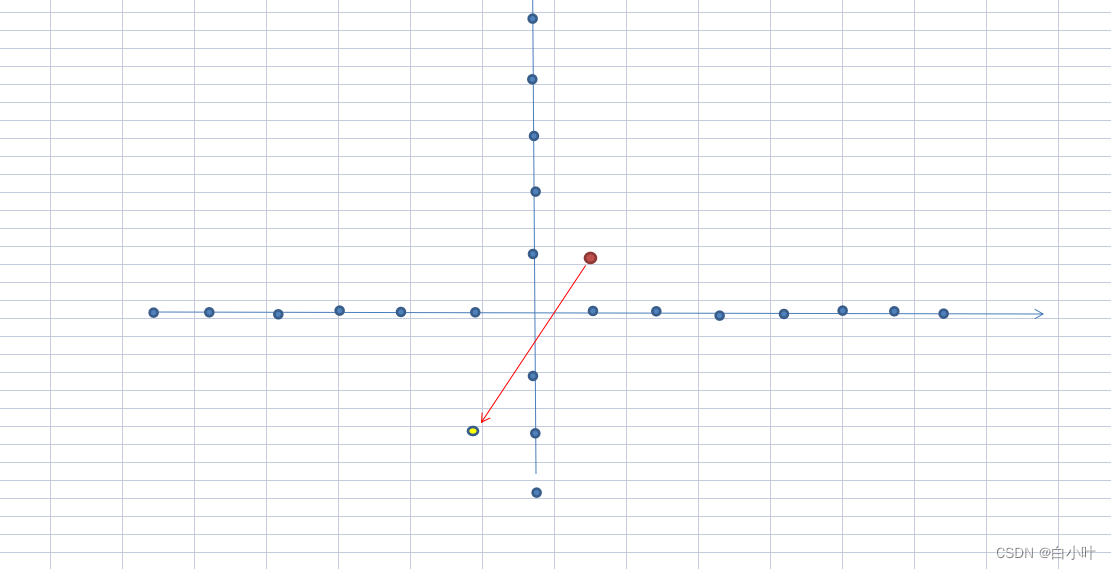
方向向量:就是两点之间的指向(高中的知识把)我们先考虑四个方向,也就是,只能朝着四个方向移动
(B*算法是直线穿透,所以要考虑八个方向)
由斜率来得到. 红点:起点(1,1) 终点:(-1,-2),斜率k=3/2,>1 说明是比较偏y轴的,所以考虑(0,1)和(0,-1)
但是x_sub= -1-1 小于0,向量指向在y轴左边所以返回(0,-1)
该点下一步就是加上该方向向量就能等得到下一点的坐标 例如(0,0)>(1,1),有0,0指向1,1的向量就是(1,1,)
具体判定: 返回的是单位向量,因为每步走一格
1.
-1<斜率<1 偏向x 轴 就考虑 (1,0)和(-1,0),x_sub>0 就(1,0),x_sub<0 就(-1,0) 注:指向终点的线 可以看做 长向量,和单位向量(1,0)和(-1,0)相比,因为偏向x轴,就不用看 y_sub, x_sub为正就指向正(1,0)
2. -1>斜率 and 斜率 > 1 偏向Y轴 y_sub>0 就(0,1),y_sub<0 就(0-1) 。。边界值-1/2 和1/2,随便就好了
3.
特殊情况 指向线在 x 轴上 。这时候斜率为 0 ,并入上面的就行
特殊情况 指向线在 Y轴上 。x_sub= 0 y_sub= +-?,斜率都没有算个锤子,因为0 不能作为被除数,直接返回 (0,y_sub/abs(y_sub))
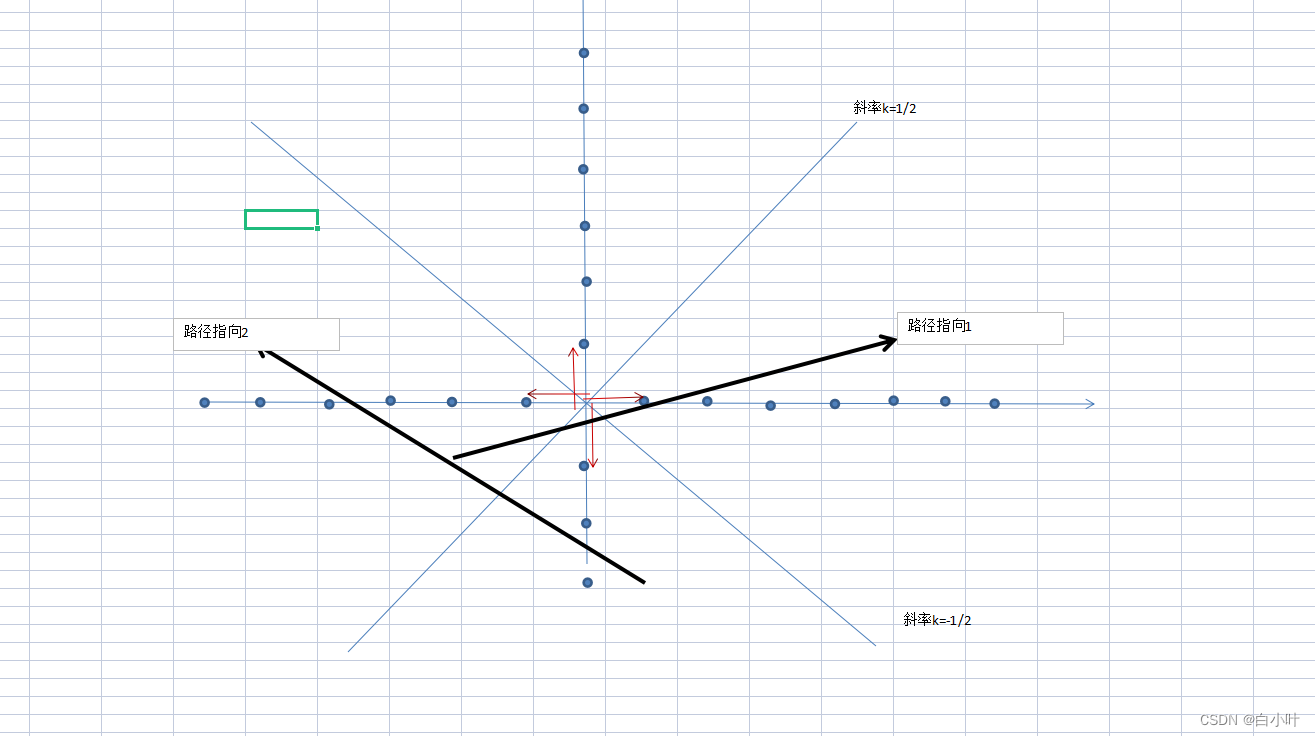
通过不断的获取指向目标终点的方向向量,一直加就能到达目标终点
# 当前点指向终点的向量。 四个方向 通过斜率相近 得到方向向量(1,0),(-1,0)(0,-1)(0,1)
def get_direct(self, cur):
x_sub, y_sub = (self.end["point"][0] - cur[0]), (self.end["point"][1] - cur[1])
# 说明 垂直 x轴上, k = y_sub / x_sub 0为被除数
if x_sub == 0:
# 可能是 除以绝对值
return x_sub, y_sub / abs(y_sub)
# 计算斜率
k = y_sub / x_sub
if -1 <= k <= 1 :
if x_sub < 0:
return (-1, 0)
else:
return (1, 0)
if k<(-1) and k>1 :
if y_sub > 0:
return (0, 1)
else:
return (0,-1)
接下来考虑 八个方向 其原理也是一样的。只不过斜率切分成了几段
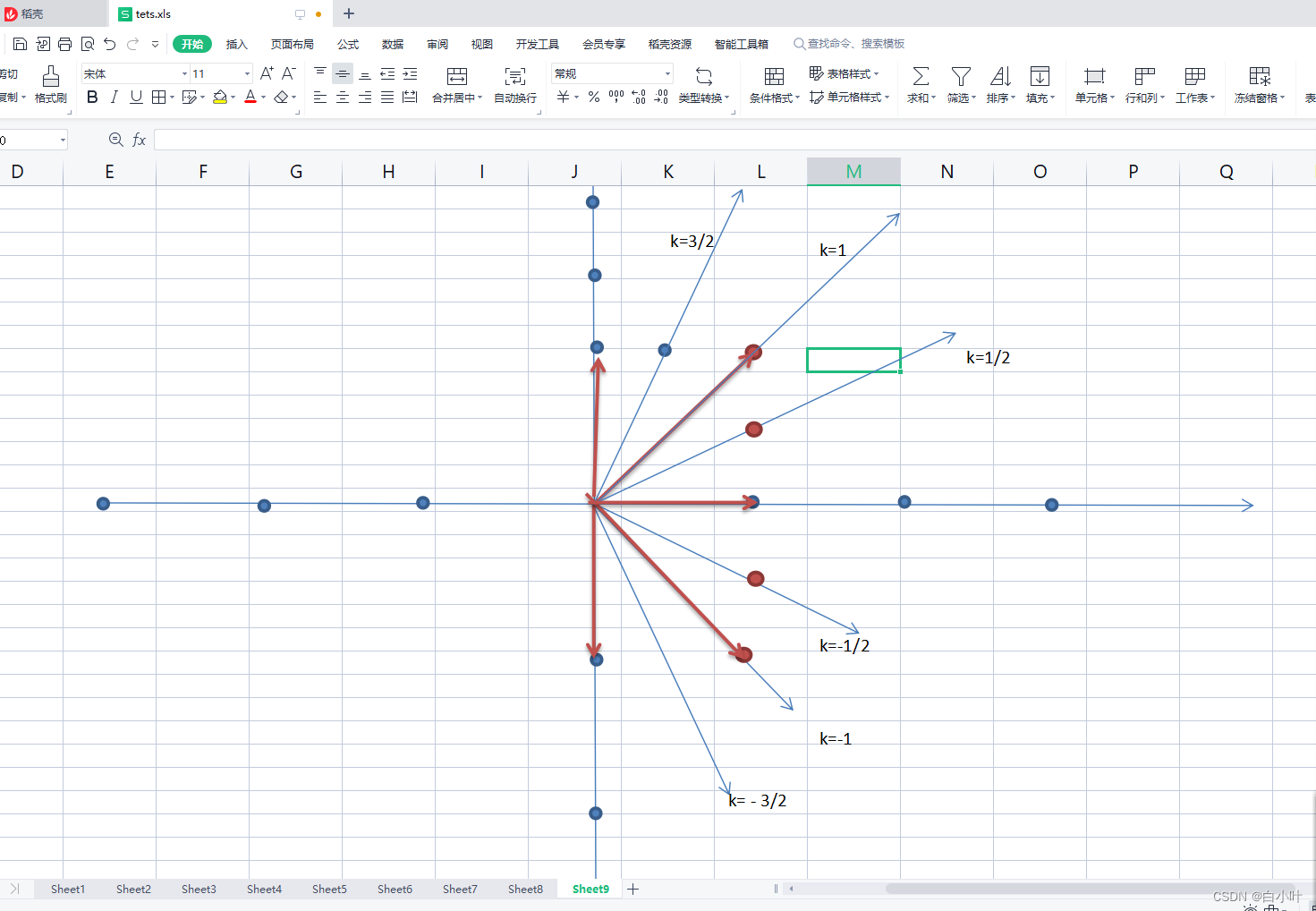
# 当前点指向终点的向量。 八方向 通过斜率相近得到方向向量(1,0)(-1,0)--(0,-1)(0,1)----(1,1)(-1,-1)---(-1, 1)(1, -1)
def B_star_get_direct(self, cur):
x_sub, y_sub = (self.end["point"][0] - cur[0]), (self.end["point"][1] - cur[1])
# 说明 垂直 x轴上, k = y_sub / x_sub 0为被除数
if x_sub == 0:
# 除以绝对值
return x_sub, y_sub / abs(y_sub)
# 计算斜率
k = y_sub / x_sub
if 3 / 2 < k or k <= -3 / 2:
if x_sub < 0:
return (0, -1)
else:
return (0, 1)
if 1 / 2 < k <= 3 / 2:
if x_sub < 0:
return (-1, -1)
else:
return (1, 1)
if -1 / 2 < k <= 1 / 2:
if x_sub < 0:
return (-1, 0)
else:
return (1, 0)
if -3 / 2 < k <= -1 / 2:
if x_sub < 0:
return (-1, 1)
else:
return (1, -1)

















 2988
2988

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









