







 超级会员免费看
超级会员免费看
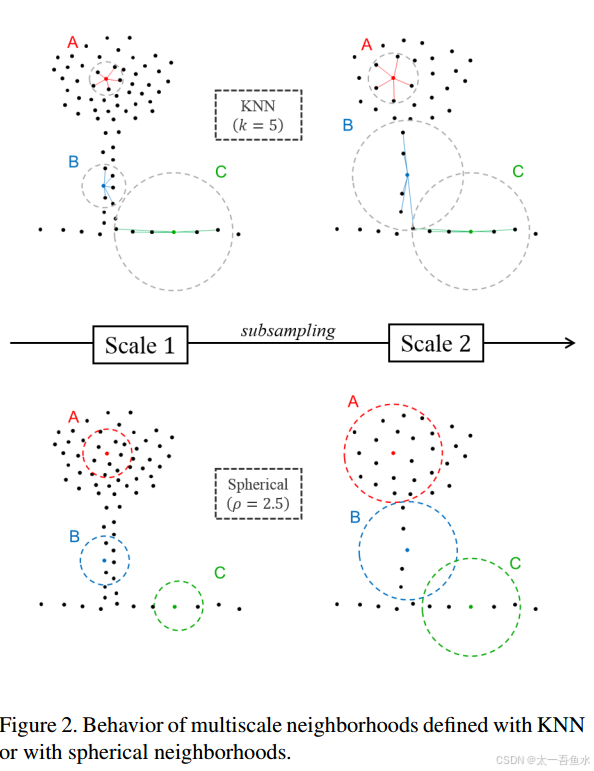
1.计算点云多尺度特征的方法
1) K近邻,然后通过VoxelGrid进行下采样。

参考文献:
Timo Hackel, J. D. W., Konrad Schindler "FAST SEMANTIC SEGMENTATION OF 3D POINT CLOUDS WITH STRONGLY VARYING DENSITY."
Schindler, T. H. J. D. W. K. "Contour detection in unstructured 3D point clouds."
Hackel, T., et al. (2017). "Joint classification and contour extraction of large 3D point clouds." ISPRS Journal of Photogrammetry and Remote Sensing 130: 231-245.
2) R半径,通过均匀采样,设置三个采样参数,同时将点数作为新的特征。
参考文献:

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 520
520

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











