




一、前言
最近想实现AVM拼接,看了不少博客和论文,不过比较愚钝,一直没能很好理解原理,尤其是怎么在实现时把下文式1与式2中Z1和Z2消除的,所以严谨的推导了一下对应的公式,如有不对,水平有限,烦请指出~
IPM变换(逆透视变换),顾名思义,即将正常透视效应消除的变换,变换结果为鸟瞰图BEV(俯视图);AVM环视拼接一般是将车身前后左右的四个鱼眼相机拼接成环视图(也是俯视),其使用的单应矩阵将四个相机转到同一个俯视坐标系。
投影变换的通俗理解就是:假设同一个相机分别在A、B两个不同位置,以不同的位姿拍摄同一个平面(重点是拍摄平面,例如桌面、墙面、地平面),生成了两张图象,这两张图象之间的关系就叫做投影变换。
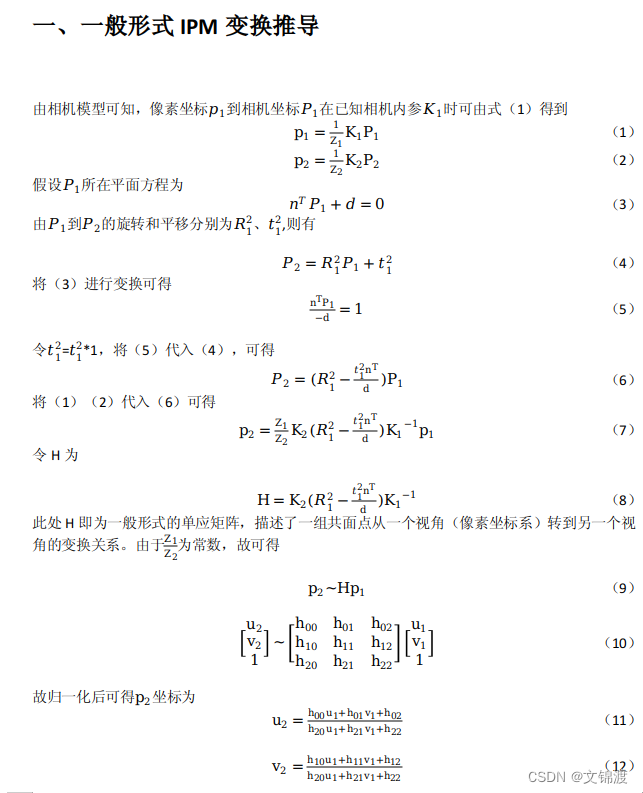
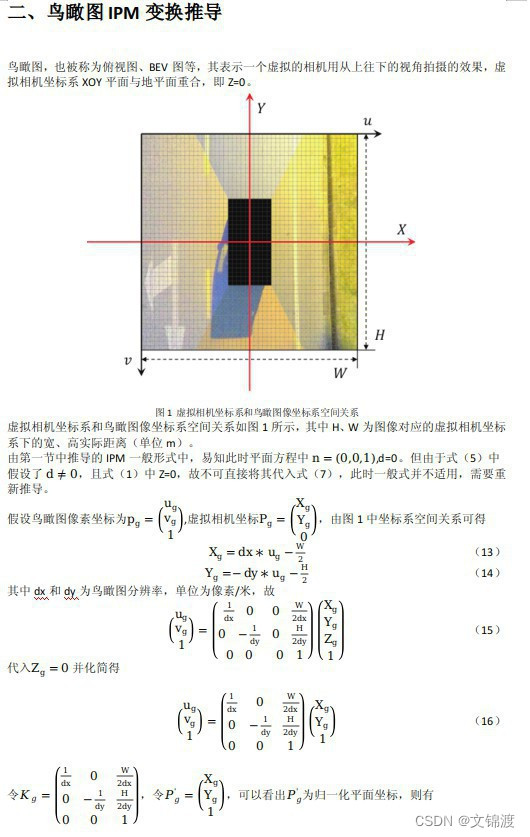
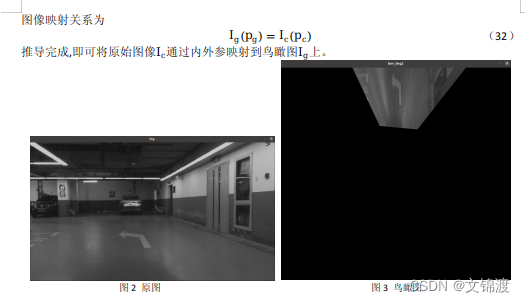
二、公式推导
公式太难打了,全用word存了,在这直接截图
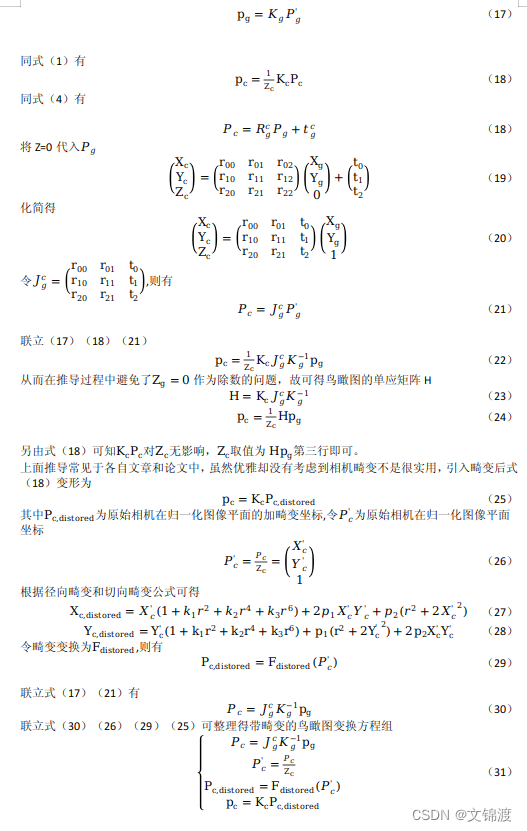
这也就解释了:为什么有的AVM算法是需要标定相机的内外参,而有的只提供单应矩阵H。
三、示例代码
#include <Eigen/Core>
#include <Eigen/Dense>
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/core/eigen.hpp>
#include <opencv2/opencv.hpp>
#include <vector>
void DistortEigenPoints(const Eigen::Vector3d &undis_pt, Eigen::Vector3d &dis_pt, double k1, double k2, double p1,
double p2) {
double x2 = undis_pt[0] * undis_pt[0];
double y2 = undis_pt[1] * undis_pt[1];
double r2 = x2 + y2;
if (r2 == 0) return;
double r4 = r2 * r2;
double r6 = r2 * r4;
double xy = undis_pt[0] * undis_pt[1];
dis_pt[0] = undis_pt[0] * (1 + k1 * r2 + k2 * r4) + 2 * p1 * xy + p2 * (r2 + 2 * x2);
dis_pt[1] = undis_pt[1] * (1 + k1 * r2 + k2 * r4) + p1 * (r2 + 2 * y2) + 2 * p2 * xy;
dis_pt[2] = 1;
return;
}
float interp(const cv::Mat &img, float x, float y) {
int ix = x;
int iy = y;
float dx = x - ix;
float dy = y - iy;
float ddx = 1.0f - dx;
float ddy = 1.0f - dy;
return ddx * ddy * img.data[iy * img.cols + ix] + ddx * dy * img.data[(iy + 1) * img.cols + ix] +
dx * ddy * img.data[iy * img.cols + ix + 1] + dx * dy * img.data[(iy + 1) * img.cols + ix + 1];
}
int main() {
std::string img_path = "Mynt/00001772.jpg";
Eigen::Matrix3d K_c;
K_c << 1037.536376953125, 0, 600.182861328125, 0, 1038.532958984375, 358.40493774414062500, 0, 0, 1;
double k1 = 0.03784750;
double k2 = -0.051872;
double p1 = -0.000938;
double 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 970
970








 到【灌水乐园】发言
到【灌水乐园】发言









