







畸变校正前首先需要做相机的标定,得到相机参数
原因:若要确认三维空间中某点与其在图像中对应点的关系,就需要建立相机成像的几何模型,几何模型的参数就是相机参数(4个内参、5个畸变系数、6个外参)
一.相机内参(4个)
仅与相机有关,3D相机坐标转换到2D图像坐标时使用
也可以理解为6个参数,其中s为坐标轴倾斜参数,理想状态下为0。1为常数。
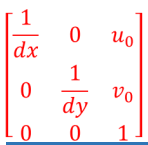
dx、dy:x方向和y方向的一个像素长度,即一个像素代表的实际物理值的大小,单位是毫米
u0,v0:图像的中心像素坐标和图像原点像素坐标之间相差的横向和纵向像素数,即像主点偏移,单位是像素
二.相机外参(6个)
取决于相机的位置,3D世界坐标转换到3D相机坐标时使用

R:旋转矩阵(3*3)
T:偏移向量(3*1)
从世界坐标系到相机坐标系的转换,需要用到相机外参,在这个坐标系下,物体做刚体转换,即本身不产生形变,仅进行旋转和平移。
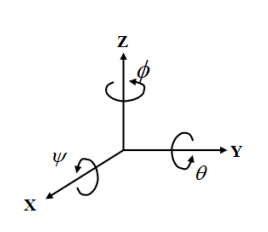
首先绕Z轴旋转:
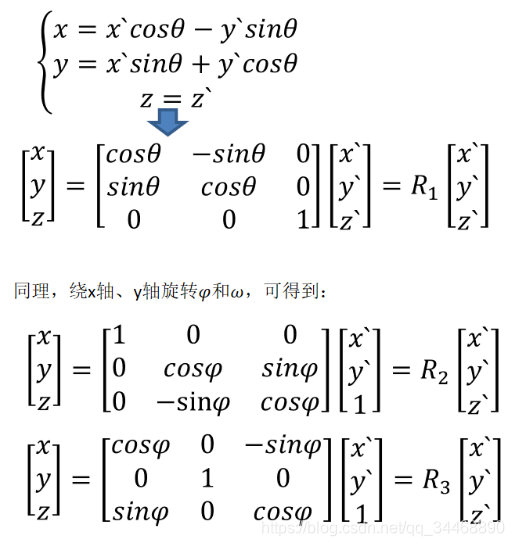
最终得到旋转矩阵:R = R1R2R3
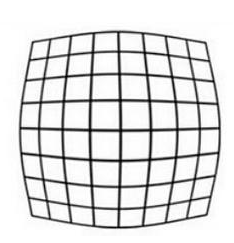
三.畸变系数(5个)
径向畸变有:k1,k2,k3
切向畸变有:p1,p2
径向畸变,发生在坐标系转换过程中
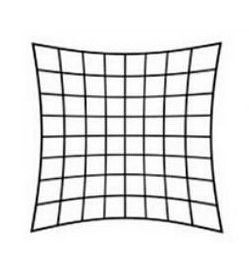

切向畸变,发生在相机制造过程中

以上参数都可以通过相机标定来获取,从而进行后续算法。

















 1470
1470

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









